
一种实用的景象匹配导航仿真验证系统*
2012-12-10 02:23:44岳亚洲张亚崇
弹箭与制导学报 2012年3期
王 涛,岳亚洲,张亚崇
(西安飞行自动控制研究所,西安 710065)
0 引言
景象匹配导航技术是利用飞行器实时采集的实时图与预先存储的景象基准图进行匹配计算,获得精确定位的一项技术,在综合导航、精确制导、视觉着陆等领域有着广泛的应用[1-3]。景象匹配导航技术的研究过程中一个主要的难点问题是实时图的仿真。在真实的飞行条件下实时图受到成像环境差异、系统噪声干扰、相机参数误差、飞机姿态与高度信息误差等多种因素影响[4],使得基准图与实时图之间存在着灰度分布、几何畸变、噪声干扰、图像质量等差异,进而影响到最终的导航定位结果。景象匹配系统的核心技术就是通过图像处理技术消除基准图与实时图之间的差异,利用适当的匹配方法,达到精确导航定位的目的。在景象匹配导航系统的研发过程中,需要大量的实时图进行理论研究与仿真验证,如何在地面通过计算机仿真的方法模拟真实的飞行条件,获取仿真实时图,使实时图包含各种误差影响,具有重要的研究意义与使用价值。
1 实时图获取方法介绍
如何获取丰富可靠的实时图以代替飞行数据,国内外的研究机构进行了大量的研究与探索[5-6],希望获得的实时图与飞行数据相比具有较高的相似度,以满足数据准确性的要求,而且希望实时图能够包含各种典型地貌特征,满足数据多样性的要求,同时需要兼顾经济性与可操作性。目前主要的实时图获取方法有以下几种[7-9]:
1)计算机仿真。该方法在基准图上截取一部分图像作为实时图,并在实时图上进行加噪、几何畸变等处理,模拟实时图的各种外部干扰。该方法利用数学建模的方法模拟实时图的干扰,具有获取方便、操作简单的特点。但由于实时图的干扰因素非常复杂,各种干扰因素互相影响,目前尚无法对各种干扰因素实现准确的数学建模,因此导致模拟生成的实时图与真实飞行条件下的实时图具有较大的差异。
2)地面景观沙盘。搭建地面景观沙盘模拟地面场景,通过云台在滑轨上运动,模拟飞机的飞行运动,相机拍摄地面景观沙盘,从而获取仿真实时图。该方法通过搭建地面景观沙盘模拟真实场景,并且考虑了飞机的运动,使得生成的模拟实时图非常接近于真实的实时图,但是这种仿真方法的成本较高,实现起来较为困难,并且扩展性较差,景观沙盘只能展现特定的部分地貌特征,无法满足实时图需要包含各种地貌特征的多样性要求。
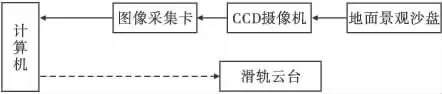
图1 地面景观沙盘仿真系统
3)真实飞行数据。在飞行条件下实时采集地面场景图像,获取真实的航拍数据。该方法的优点是实时图完全真实可信,可以为理论研究与方案设计提供最可靠的实验数据,但是该方法成本很高,操作复杂,并且受飞行条件、空域限制等因素影响无法实现各种典型地貌特征区域的大样本验证,故无法推广应用。
2 景象匹配导航仿真验证系统
现有的实时图生成方法由于存在着各种限制与不足,为景象匹配系统的研发与验证带来了很大的困难。文中提出一种景象匹配导航仿真验证系统方案,该方案可以模拟主要误差因素的影响,包括成像系统的噪声干扰,CCD相机参数误差,飞机姿态与高度误差等。与计算机仿真方法相比,该方案生成的实时图具有非常高的真实性,满足研究工作数据准确性要求;与地面景观沙盘方法相比,该方案不仅保留了地面景观沙盘方法的优点,并且增强了系统的扩展性,可以任意更换基准图,理论上可以覆盖任意区域,满足数据多样性要求;与真实飞行数据验证相比,该方法具有易于实现,节约成本的特点,并且不受空域、地域影响,可以实现各种地貌条件下的大样本验证。

2 景象匹配导航仿真验证系统结构图
景象匹配导航仿真验证系统主要包含以下部件:
1)飞行轨迹发生器。根据用户的设定自动生成仿真实验中飞行器的飞行轨迹,包括经度、纬度、高度、东向速度、北向速度。
2)动态视景模拟器。主要用于参考图的实时动态放映。在放映过程中可以模拟各种几何畸变干扰,包括尺寸的缩放、角度的旋转、局部遮挡;可以模拟各种外部干扰,包括噪声干扰、光线的变化、天气的变化等。
3)主控计算机。用于图像的采集、处理和存储。主要完成实时图预处理、参考图预处理、各种景象匹配计算、显示最终匹配结果。
4)投影仪。将放映计算机中存储的参考图投射到屏幕上,模拟真实的地面场景。
5)CCD相机。实时采集屏幕上的图像,生成模拟实时图。
6)6自由度机械臂。6自由度机械臂能够完成上下、左右和前后的位置移动,以及回旋、俯仰和横摆等角位置移动。将摄像机安装在机械臂上,由计算机控制机械臂来模拟飞行器的运动状态,如通过机械臂带动摄像机进行回旋、俯仰和横摆等角位置运动来模拟飞行器的姿态变化;通过机械臂带动摄像机进行前后、左右和上下移动来模拟飞行器的位置变化对图像比例因子的影响。
7)姿态模拟器。根据用户的设定自动生成仿真实验中飞行器的姿态变化过程,包括俯仰角、横滚角、航向角。
8)投影屏幕。显示投影的图像,模拟动态地面场景。
在景象匹配导航仿真验证系统中,利用飞行轨迹发生器设定飞行器的飞行轨迹,飞行轨迹输入到动态视景模拟器中,激励视景模拟器将存储的基准图通过投影仪在投影屏幕上动态放映。由于采用了基准图的动态放映技术,所以可以逼真地模拟飞行条件下的地面场景。
姿态模拟器用于设定仿真验证过程中飞行器的姿态信息,并激励6自由度机械臂按照设定的姿态信息进行角运动。从而模拟了飞机在飞行过程中的各种姿态变化。
主控计算机通过CCD相机采集投影屏幕的动态视景,进行景象匹配导航计算,并输出匹配结果。CCD相机安装在6自由度机械臂上,随着机械臂的姿态运动,可以拍摄各种姿态变化下的实时图。
3 仿真验证系统特点分析
景象匹配导航仿真验证系统在实时图的获取方法上进行了有效的改进与创新,与现有的实时图获取方法相比,具有明显的优点,主要体现在以下几点。
3.1 实时图的准确性
景象匹配导航仿真验证系统可以模拟实时图的各种外部干扰,使得生成的实时图与真实的飞行数据相比具有非常高的相似性。各种外部干扰可以通过以下方法实现:
1)外界环境引起的亮度差异。在试验中为了较为真实地反映外界环境造成的亮度差异,验证算法的有效性,设计了多种的光照条件,如强光环境,弱光环境,不均匀的光照环境等。
2)相机参数引起的干扰。包括光圈、焦距等的调节所引起图像品质的变化。
3)噪声。在地面景象仿真图中加入的高斯白噪声;CCD摄像机、图像采集卡本身以及信号传输过程包含的各种固有噪声;其他外界环境产生的各种难以估计的噪声。
4)运动模糊。为了模拟飞行状态下的成像环境,在地面景象仿真图中加入5个像素的运动模糊处理,模拟飞行器装备的CCD摄像机在飞行过程中拍摄的实时图。
景象匹配导航仿真验证系统由于引入了真实的成像传感器,相对于计算机仿真来说更加接近于实际工作情况,可以为景象匹配关键技术研究与系统方案设计提供可靠的实验数据。
3.2 飞机运动的模拟
景象匹配导航仿真验证系统可以模拟飞行器在运动状态下对实时图的影响,包括飞行器的线运动与角运动。仿真系统采用了动态视景模拟器,可以实时动态放映基准图,逼真再现了飞行器的直线运动条件下的地面场景;利用6自由度机械臂带动摄像机进行回旋、俯仰和横摆等角位置运动,从而模拟飞行器的姿态变化对实时图的影响。
3.3 多样性与经济性
景象匹配导航仿真验证系统采用动态放映基准图的方法来模拟飞行器飞行状态下的地面场景,基准图可以任意更换,因此实时图可以包含任意区域,任意地貌特征,保证了实时图的多样性。同时由于实时图是在实验室仿真得到的,不需要进行飞行实验,不受空域限制,大幅度降低了获取的成本,满足了经济性要求。
3.4 时间同步与空间对准
景象匹配导航仿真验证系统包含多个子系统,各个子系统的协同工作对时间的同步以及空间的对准提出了严格的要求。在该仿真系统中主控计算机采用了多线程实时控制技术实现对各子系统的时间同步控制,并将瞬时信息同步采集到主控计算机中进行处理;在投影屏幕的后方建立摄像机高精度标定场。利用高精度标定技术不仅对相机的内外参数完成了标定,而且实现了对摄像机坐标系、屏幕坐标系和6自由度机械臂坐标系的统一,为实现系统的精确定位提供技术保障。
4 结论
景象匹配导航仿真验证系统可以在地面真实的模拟飞行器运动状态下相机的工作环境,生成的实时图不仅包括成像系统自身的噪声影响,相机参数误差的干扰,而且通过控制相机的姿态变化,可以使实时图包含姿态变化带来的畸变干扰,生成的实时图非常接近于真实的飞行数据,可以为景象匹配导航系统的理论研究提供充实的试验数据。与现有的仿真验证系统相比,文中提出的景象匹配导航仿真验证系统方案在经济性、扩展性、操作性方面都有较为明显的提高,可以为景象匹配导航系统提供有效的仿真验证环境。
[1]赵倩,许家栋,袁健全,等.基于高程选择的SAR景象匹配系统基准图选择准则[J].弹箭与制导学报,2009,29(6):253-255.
[2]陈方,熊智,许允喜,等.惯性组合导航系统中的快速景象匹配算法研究[J].宇航学报,2009,30(6):2308-2316.
[3]I A J Davison,I Reid,N Molton,et al.MonoSLAM:Realtime single camera SLAM[J].IEEE Transactions on Patterns Analysis and Machine Intelligence,2007,29(6):1052-1067.
[4]于起峰,尚洋.摄像测量学原理与应用研究[M].北京:科学出版社,2009.
[5]胡礼勇,缪栋,杨小冈.景象匹配实时图模拟生成中几何畸变的建模与仿真[J].弹箭与制导学报,2006,26(2):743-745.
[6]杨小冈,曹菲,黄先祥,等.景像匹配仿真中实时图的仿真生成[J].系统仿真学报,2010,22(5):1270-1273.
[7]王艳丽,李铁军,陈哲.景像匹配导航系统全局仿真技术研究[J].系统仿真学报,2004,16(1):108-112.
[8]艾浩军,胡瑞敏.景像匹配仿真的一种新方法[J].武汉科技大学学报:信息科学版,2001,26(3):261-265.
[9]唐伟龙,陈哲.基于高速局域网的MIF仿真平台总体框架设计[J].弹箭与制导学报,2005,25(2):470-472.
猜你喜欢
幼儿园(2021年3期)2021-07-28 07:11:24
海峡科技与产业(2021年1期)2021-05-22 01:26:54
福建基础教育研究(2020年1期)2020-05-28 08:39:54
小太阳画报(2018年2期)2018-05-14 17:19:26
科技创新与应用(2018年35期)2018-02-28 10:36:54
山东工业技术(2017年19期)2017-09-27 11:47:10
疯狂英语·初中天地(2017年6期)2017-06-24 13:51:05
小天使·二年级语数英综合(2017年1期)2017-02-08 23:18:11
计算机工程与设计(2015年7期)2015-12-23 00:54:08
当代经济(2015年4期)2015-04-16 05:57:05
