特征参数对延伸式张力腿平台运动性能影响
2012-12-08 02:25陈孝建刘玉卿杨树耕张振宇刘小燕孙华峰
石油矿场机械 2012年4期
陈孝建,刘玉卿,杨树耕,张振宇,刘小燕,孙华峰
(1.天津大学建筑工程学院,天津300072;2.海洋石油工程股份有限公司,天津300459) ①
特征参数对延伸式张力腿平台运动性能影响
陈孝建1,刘玉卿1,杨树耕1,张振宇1,刘小燕1,孙华峰2
(1.天津大学建筑工程学院,天津300072;2.海洋石油工程股份有限公司,天津300459)①
在深水平台的设计与分析中,调整平台某种参数以提高某一性能时,经常受到其他功能或性能的约束。应用SESAM软件建立延伸式张力腿平台的三维水动力模型,采用势流理论进行计算分析,获得延伸式张力腿平台运动响应的传递函数。在此基础上研究各特征参数对平台水动力性能的影响。研究结果对延伸式张力腿平台初期设计时各特征参数的确定具有指导意义。
延伸式张力腿平台;特征参数;运动性能;传递函数
在深海作业中,张力腿平台具有运动性能良好、抗恶劣环境作用能力强、造价比固定式平台低等优点,因此是今后一段时间内深水石油平台的主要形式之一。通过对传统张力腿平台的主体结构进行一定的改良设计,得到延伸式张力腿平台。与传统类型张力腿平台比较,延伸式张力腿平台具有更大的承载能力、更优良的运动性能、更高效更低风险的项目运行计划。以前学者对我国南海深水油田浮式钻采平台的选型建议为:在<1 500m水深时应以张力腿平台为首选[1];根据后来学者的进一步研究表明,在张力腿平台中又以延伸式张力腿平台为首选[2]。当前,我国的海上油气开发事业正处在由浅海向深海的过渡阶段,对深水平台的研究和设计已经迫在眉睫,延伸式张力腿平台在我国深水石油的开发中将发挥重要作用。
本文应用三维势流理论,以挪威船级社(DNV)的SESAM程序系统作为主要分析工具,对延伸式张力腿平台各特征参数(例如,立柱间距、重力配置、平台上体质量(吃水深度)、张力腿的预张力、刚度等)与平台运动性能之间的关系进行了研究,对延伸式张力腿平台初期研究和设计具有一定的参考价值。
1 理论基础
1.1 规则波中的平台运动响应计算原理
延伸式张力腿平台的下体结构是由立柱和浮筒组成,属于大型结构物。对于在波浪场中小振幅运动的大型结构物,波浪对结构的作用可以分解为2个方面,即,绕射作用和辐射作用[3]。
应用SESAM程序的HydroD/Wadam模块进行计算,由Newtons定律以及包含附加质量、阻尼和作用在动力模型中的板单元以及莫里森单元上的激振力而形成运动方程[4]为

式中,M为6×6阶质量矩阵;A(ω)为6×6阶波浪附加质量矩阵;B(ω)p为6×6阶势流阻尼矩阵;Bv为6×6阶线性粘性阻尼矩阵;C为静力回复矩阵;Ce为外部回复矩阵;X(ω,β)为运动矢量;F(ω,β)为波浪外部激振力矩阵(i为虚数单位)。
1.2 传递函数
传递函数是浮体在单位规则波幅的简谐波作用下的浮体响应。随时间变化的响应量R(ω,β,t)与传递函数H(ω,β)的关系为[5]
R(ω,β,t)=ARe[|H(ω,β)|ei(ωt+)]
式中,A为入射波的幅值,ω为入射波的角频率,β为入射波的方向,t为时间,为相位角(e为自然常数;Re表示复数的实部)。
2 特征参数对平台运动性能影响
张力腿平台在风、浪、流力作用下会产生水平位移(纵荡和横荡),并且是往复变动的,因而不利于作业,因此这一运动性能成为张力腿平台的一个重要技术指标。对于采用干式采油树的张力腿平台,垂荡运动性能也显得尤为重要。对于张力腿平台,纵摇、横摇和艏摇运动相比于纵荡、横荡和垂荡运动要小很多[6]。为突出主要矛盾,简化问题,并结合结构形式的对称性,本文主要考虑纵荡与垂荡运动性能。
用于分析的ETLP的主尺寸是以ABB公司为东南亚海域设计的一座延伸式张力腿平台为母型而确定的,主要尺寸为:采用2层甲板,间距9m,甲板宽度66m×66m,甲板间采用桁架连接;立柱直径16m,浮筒宽8m、高8m,悬臂浮筒长10m、宽11.31m、高8m。在HydroD中建立的典型的水动力模型如图1所示。
研究的环境条件选用南海某海域一年一遇海况:有义波高6m,谱峰周期11.2s,水深1 500m,波浪谱为Bretschneider谱。波浪入射方向取0°,计算波浪频率为0.2~2.0rad/s,步长取0.2,共10个波浪频率。
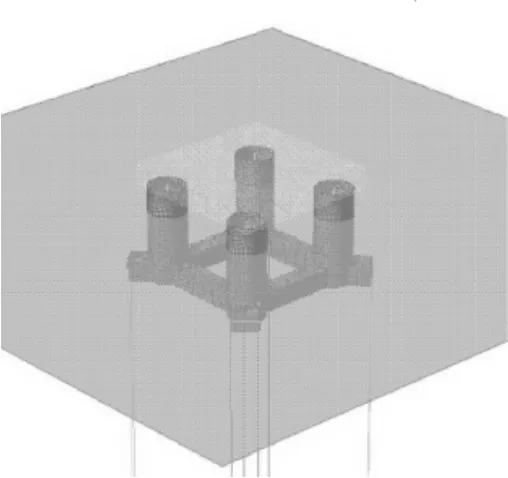
图1 ETLP水动力模型
2.1 立柱间距敏感性
立柱间距分别取为48、56、64m。纵荡和垂荡传递函数幅值比较如图2~3。
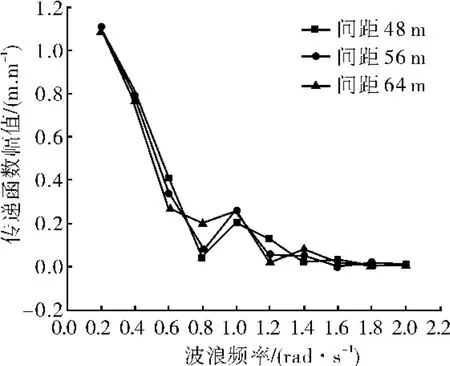
图2 不同立柱间距时纵荡RAO幅值比较
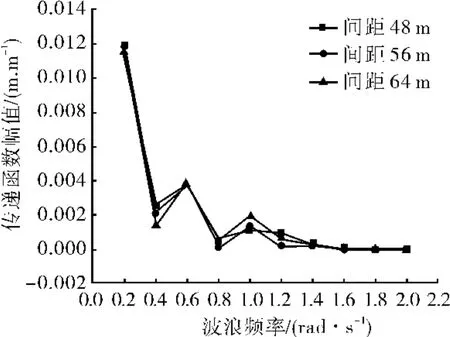
图3 不同立柱间距时垂荡RAO幅值比较
由图2~3可以看出,随着立柱间距的改变,ETLP在低频波浪和高频波浪区的运动响应表现出不一样的规律。在低频区,纵荡和垂荡运动是随着立柱间距的加大而减小的,但是在中高频区表现出极大的不规律性。
2.2 重力布置敏感性
结构总重力为216 741kN,在允许范围内通过调整平台质量分布来改变重力的布置,纵荡和垂荡传递函数幅值比较如图4~5。
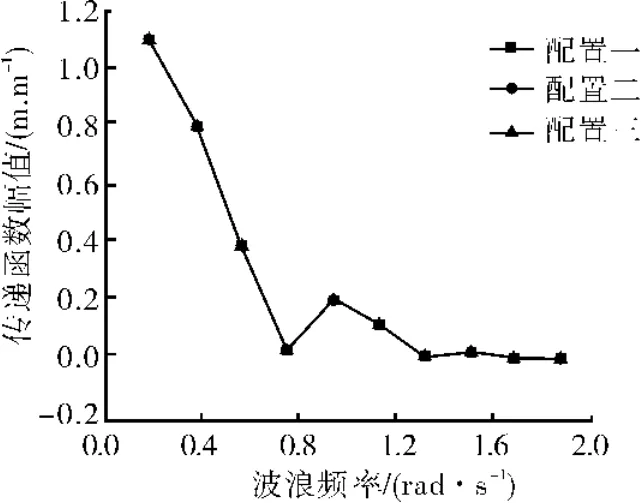
图4 不同重力布置时纵荡RAO幅值比较
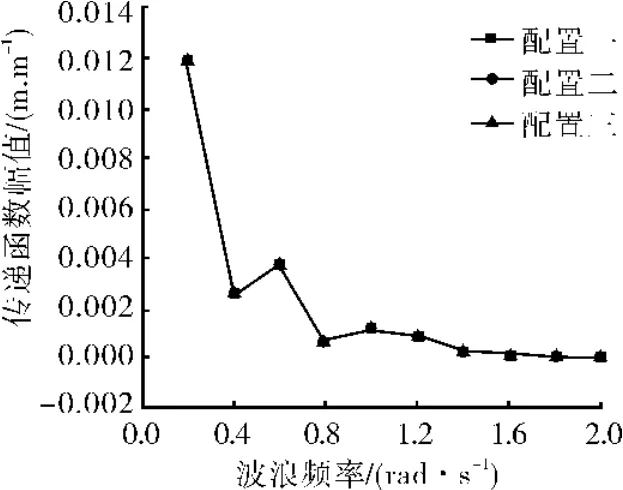
图5 不同重力布置时垂荡RAO幅值比较
由图4~5可以看出:对于不同的重力布置,纵荡和垂荡运动的RAO幅值曲线在整个波频范围内都分别重合,即ETLP的运动响应不会随着重力布置的变化而改变,平台的运动响应对重力配置的变化不敏感。
2.3 上体重力敏感性分析(吃水变化)
重力的变化必然引起吃水的变化,减小平台上体质量并调整结构吃水。调整后结构重力分别为216 741、187 889、159 037kN,对应吃水分别为29.5、26.0、22.5m。纵荡和垂荡传递函数幅值比较如图6~7。
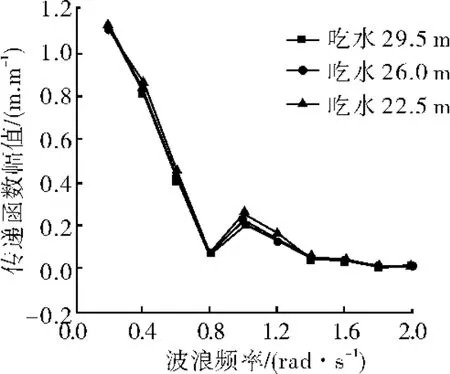
图6 不同吃水深度时纵荡RAO幅值比较
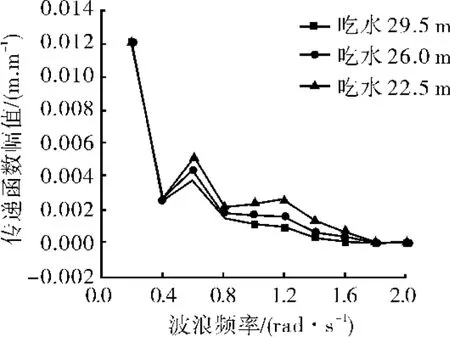
图7 不同吃水深度时垂荡RAO幅值比较
由图6~7看以得出:在整个波频范围内,随着上体质量的减小,吃水减小,平台的运动响应是逐渐增大的。垂荡运动性能对于吃水的变化更敏感。
2.4 系索刚度敏感性
系索刚度分别取为60 500、50 500、40 500 kN/m时,纵荡和垂荡传递函数幅值比较如图8~9。系索刚度的变化不宜过大,太大的刚度对平台的运动响应影响较小[7-8],因此所选用于比较的刚度变化幅度不应过大。
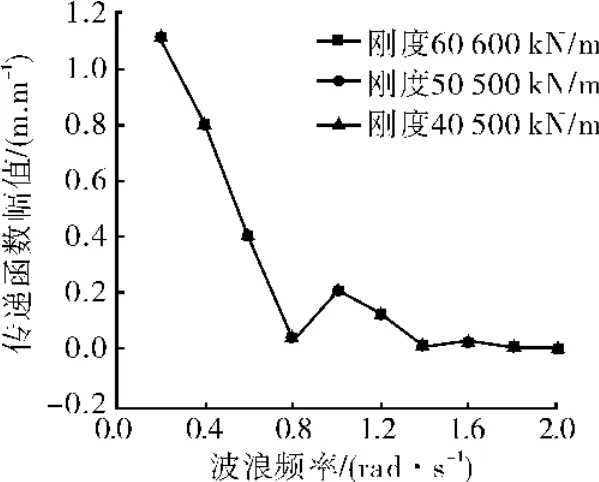
图8 不同系索钢度时纵荡RAO幅值比较
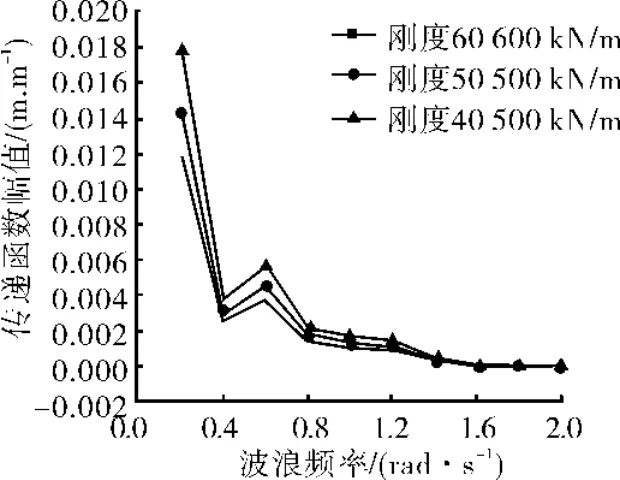
图9 不同系索钢度时垂荡RAO幅值比较
图8表明:在不同的系索刚度下,整个波频范围内,平台纵荡RAO幅值曲线都是重合的,因此系索刚度的变化不会引起纵荡运动性能的变化。图9则表明,垂荡会随着刚度的减小产生更大的运动幅值。
2.5 系索预张力敏感性
系索预张力分别取为占总排水量的25%、 30%、35%时,纵荡和垂荡传递函数幅值比较如图10~11。
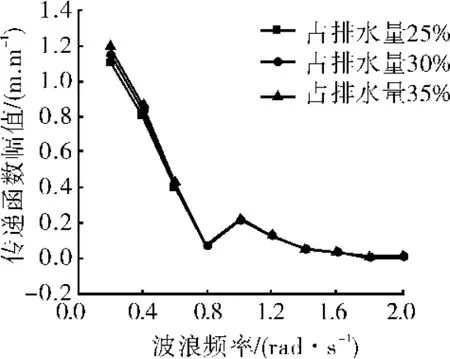
图10 不同系索预张力时纵荡RAO幅值比较
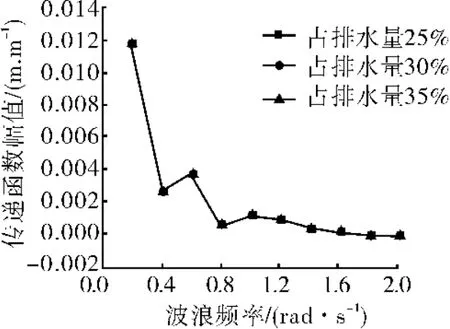
图11 不同系索预张力时垂荡RAO幅值比较
图10表明:随着系索预张力的增大,结构纵荡运动响应有所增加,但低频区要比高频区敏感。图11表明,垂荡运动响应不会随着系索预张力的增大而改变,其RAO幅值曲线在整个波频范围内重合。
2.6 结果比较
1) 入射波方向相同时,虽然各特征参数有所改变,但同一运动模态的传递函数曲线形状十分相似。传递函数表征了波浪谱与平台运动响应之间的关系,因此它是对平台自身性质的一种反映。只要不出现浮体出水或者显著上浪等极端情况,平台运动的响应传递函数随频率的变化趋势都应基本保持一致。
2) 因为垂荡运动与纵荡运动的耦合作用非常明显,因此二者的响应传递函数随频率的变化趋势基本一致。通常情况下,因为平台上体中纵剖面所受弯矩随立柱间距的增大而增大,考虑到结构的安全性和可靠性,要求在良好稳性的条件下尽量减小立柱间距,以保证结构在强度上的要求,且可以降低平台造价。
3) 平台总重力不变的情况下,其重心位置的变化不会引起平台运动性能的变化,因而可以使平台的总布置设计具有更大的灵活性,以达到工艺布置与结构强度的最优化配置。
4) 平台吃水减小,平台气隙则增加,平台的纵荡和垂荡响应均增大,因此增加平台的气隙是以损失结构的运动性能为代价的。
5) 虽然刚度的减小会带来垂荡运动的幅值有所增加,但也使得结构具有更好的顺应性,从而可以使垂荡所带来的系索张力的变化很小。在保证系索强度和平台运动性能在允许范围的条件下,可以适当降低系索刚度,这样不仅有利于增大垂荡运动固有周期,使上部人员更加舒适,而且可以降低系索的造价。
6) 虽然系索预张力的减小有助于减小平台的纵荡运动幅值,但是出于整体安全性的要求,考虑破舱和潮差等因素的影响,系索预张力不应过小。根据API的规定,要求25%~45%的浮力用于提供系索张力。
3 结语
目前,随着陆上和近海石油资源开发渐近枯竭,我国对于南海深水油气资源的勘探开发已经到了刻不容缓的地步。本文研究了各特征参数对延伸式张力腿平台运动性能的影响,其结果不仅可以应用于延伸式张力腿平台的研究和设计中,而且可以将其应用到一般张力腿平台的设计与分析中。另外,可以更好地协调平台的功能和运动性能之间的关系,使平台各项功能与性能之间达到一个相对最优平衡,对我国张力腿平台平台的研发和设计具有重要意义。
[1] 谢 彬,张爱霞,段梦兰.中国南海深水油气田开发工程模式及平台选型[J].石油学报,2007(1):1-2.
[2] 李 牧.南海张力腿平台优化选型研究[D].天津:天津大学,2009.
[3] 胡志敏,董艳秋,张建民.张力腿平台波浪载荷计算[J].中国海洋平台,2002,17(3):6-11.
[4] DNV.SESAM User Manual HydroD Version 4.2[K].2008.
[5] DNV.SESAM User Manual Postresp Version 6.2[K].2007.
[6] 董艳秋.深海采油平台波浪载荷及响应[M].天津:天津大学出版社,2005.
[7] 任顺利,陈建民,梁艳霞.张力腿刚度对平台运动响应影响分析[J].石油矿场机械,2008,37(5):28-31.
[8] 张彦廷,刘振东,姜 浩,等.浮式钻井平台升沉补偿系统主动力研究[J].石油矿场机械,2010,39(4):1-4.
Influence of Characteristic Parameters on ETLP’s Motion Performance
CHEN Xiao-jian1,LIU Yu-qing1,YANG Shu-geng1,ZHANG Zhen-yu1,LIU Xiao-yan1,SUN Hua-feng2
(1.College of Architectural Engineering,Tianjin University,Tianjin300072,China;2.Offshore Oil Engineering Co.,Ltd.,Tianjin300459,China)
In the design and analysis of deep-water platform,it is often affected by constraints of other functional or performance while adjusting aparameter to improve the platform performance.The SASEM procedure was used to build the 3Dhydrodynamic finite element model of ETLP.Then the transfer functions were calculated for motion performance of ETLP by the way of utilizing potential flow theory.The influence of characteristic parameters on ETLP’s hydrodynamic performance was studied on the basis of calculations.The research results are valuable for determining the characteristic parameters in the early design of ETLP.
ETLP;characteristic parameters;motion performance;transfer function
1001-3482(2012)04-0021-04
TE951
A
2011-10-26
陈孝建(1986-),男,江西南昌人,硕士研究生,主要从事海洋工程结构物设计与制造工作,E-mail:figochen@tju.edu.cn。
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18
中国特种设备安全(2021年5期)2021-11-06
装备制造技术(2021年4期)2021-08-05
当代陕西(2020年24期)2020-02-01
小哥白尼(趣味科学)(2018年12期)2018-12-18
测控技术(2018年7期)2018-12-09
制造技术与机床(2017年11期)2017-12-18
光学精密工程(2016年4期)2016-11-07
电测与仪表(2015年7期)2015-04-09
中国航海(2014年1期)2014-05-09