
建筑物三维激光扫描点云的粗差剔除研究
2012-12-08 05:03李孝雁
黄河水利职业技术学院学报 2012年1期
黄 飒,李孝雁
(1.河南理工大学 测绘与国土信息工程学院,河南 焦作 454000; 2.黄河水利职业技术学院 河南 开封 475004)
0 引言
近些年,随着城市信息化建设的加快,数字城市建设正受到越来越多人的关注。 在数字城市建设过程中,制约数字城市发展的一个瓶颈是3D 空间数据的快速获取[1]。 三维激光扫描技术能快速完成实体表面数据点的扫描测量工作,获得大量精确、密集的三维坐标点云数据[2],并将这些复杂、不规则的三维数据完整地采集到电脑中,进而构建出实体表面的三维模型。 该技术的出现,为快速获取3D 空间数据提供了新的手段。
然而,在获取三维数据的过程中,由于扫描仪本身限制的或者扫描过程中外界环境因素对扫描目标的阻挡和遮掩,使得生成的数据往往带有大量的噪声点,直接影响到数据的后期处理,进而使得重建后的模型粗糙甚至变形。 因此,为了得到目标物体形体信息的最佳估值,需要对扫描得到的原始数据进行进一步处理,从中剔除含有粗差的相关观测数据和无效形体数据。
建筑物是城市环境的重要组成部分,通过三维激光扫描测量技术快速获取建筑物3D 空间数据,是数字城市建设的重要内容。 针对建筑物平面特征较多的特点,可在总结三维激光扫描点云粗差剔除算法的基础上, 归纳一种简单严密的粗差剔除方案,并编程实现。 然后,利用一组某建筑物的三维激光扫描点云原始数据,进行粗差剔除实验,以此检验方案的可行性和可靠性。 这为采用三维激光扫描技术在数字城市建设中快速采集数据做了有益的探索。
1 三维激光扫描原理
1.1 硬件构成与工作原理
三维激光扫描测量系统由三维激光扫描测量仪、后处理软件、电源等设备组成。 其工作原理为:激光脉冲发射器周期性地驱动一激光二极管,发射激光脉冲,然后由接收透镜接受目标表面的后向反射信号,产生一接收信号。 利用一稳定的石英时钟对发射与接收时间差作计数,根据激光发射和返回的时间差,计算被测点与扫描仪的距离S,同时根据水平方向和垂直方向的偏转镜,同步测量出每个激光脉冲的横向扫描角度观测值φ 和纵向扫描角度观测值θ, 然后实时计算被测点Ρ 的三维坐标x,y,z(如图1 所示)。
1.2 坐标系及计算公式
三维激光扫描仪一般采用仪器内部坐标系统,X 轴在横向扫描面内,Y 轴在横向扫描面内与X 轴垂直,Z 轴与横向扫描面垂直,构成右手坐标系[3],扫描点坐标的计算公式为:

三维激光扫描仪通过传动装置的扫描运动,完成对物体的全方位扫描,然后进行数据整理。 通过一系列处理,获取目标表面的点云数据。
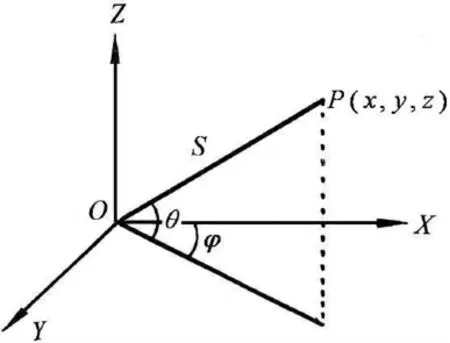
图1 三维激光扫描仪坐标测量原理Fig.1 3D laser scanner coordinate measurement principle
2 点云粗差剔除方案
2.1 点云数据的预处理
三维激光扫描点云数据的粗差剔除不同于其他测量手段获得数据的粗差剔除,因为点云数据量大,计算机的处理会耗费大量的时间,对几万甚至上百万的数据进行粗差剔除,其计算量是难以想象的。 所以要先对数据进行预处理,以提高数据处理的运算速度。 预处理过程分为以下3 个步骤:
1)裁剪。 通过人工裁剪,对比较明显并且容易删除的干扰地物进行处理,以免其对后面的粗差剔除形成干扰。裁剪后,将点云数据导出,文件格式可以为TXT 或DXF。
2)分块切割。 由于有棱角的建筑物实体表面是非连续的,所以对于建筑物表面,可以将其沿拐角处切割成各个平面,把整个点云数据分成一个个小的面域模块。 再分别对各个面域模块的点云进行粗差剔除处理。 这样便可以高效率地获得高质量的点云粗差剔除成果。 分块切割有两种方式,一种是在Cyclone 软件下人工直观地进行切割分块;另一种是根据建筑物点云数据在坐标系中的X-O-Y 平面下的线性特点,采用计算机编程,实现对上一步操作导出的TXT 格式的点云数据文件进行自动分割。
3)设置拼接参考点。 为获得高质量的点云和拟合平面,可将这些模块在粗差剔除后进行拼接,合成一幅完整的建筑3D 空间点云数据和三维模型。 处理方法是:在将点云数据切分成单独的小模块的时候,需要对这些数据进行一些特殊的处理。 即将点云数据分块处理的时候,需要在分接处设置3~4 个参考点,作为两个相邻模块的公共点。 这样,当进行拼接的时候,就可利用这几个参考点。 选择参考点规则是:(1)参考点不能在一条直线上;(2)参考点应是建筑物的特征点;(3) 参考点间距要在适当范围内取最大值。
经过上述3 步操作,就可以将数据保存输出为空间直角坐标X,Y,Z 的形式。
2.2 建筑物点云的稳健平面拟合粗差剔除算法及实现
针对建筑物平面特征较多的特点,本文提出根据点到平面的距离来判断是否剔除该点的方法。 即先将建筑物切割成平面,再分别对各个面进行平面拟合。 拟合后,根据点云到平面的距离,判断是否剔除。
从点云数据中拟合平面的方法有多种,包括最小二乘法、特征值法等。
最小二乘法在假设误差仅存在于z 方向的条件下,利用最小二乘间接平差,解算平面参数。 由于点云数据在x,y,z 3 个方向均存在误差, 因此最小二乘法并不适合于点云数据平面拟合。 采用特征值法,在x,y,z 3 个方向均存在误差的情况下,能获得最优的平面估计,但在解算时并没有考虑到点云数据中可能存在异常值的情况。
鉴于上述算法的不足,本文提出基于特征值的稳健平面拟合算法[4]。 具体算法如下:
令空间平面方程表示为:

式中:(a,b,c)为平面的单位法向量;d 为坐标原点至平面的距离,d≥0。
稳健平面拟合的具体步骤如下:
(1)利用特征值法计算平面方程三个参数a,b,c 的初始值,拟合初始最优平面。
(2)利用计算出的a、b、c 值,根据公式(3),计算出每个点至拟合平面的距离di。

(3)利用公式(4)计算距离di的标准偏差σ;


(4)进行粗差剔除判断:当di>2σ 时,此点若被认为是异常点,就予以删除;反之,则保留。
(5)利用所有保留下来的点重新计算a,b,c。
(6)重复(2)~(5)步,直到剩下的点至拟合平面的距离di都在规定的阈值之内,即直至di都小于2倍的标准偏差时为止。 此时粗差剔除完成,可得到高质量的点云数据。
(7)计算最佳的a、b、c 值。
(8)根据公式(5)计算d,就可以得到最佳的拟合平面。
根据上述稳健平面拟合点云粗差剔除算法,可采用计算机编程实现建筑物点云数据中粗差的剔除,其程序框图如图2 所示。
2.3 粗差剔除应用
笔者用可视化编程语言Visual Basic 编程实现了上述的粗差剔除功能,并用实例对粗差的剔除效果进行了检验实践。 其实例为: 采用Leica Scan Station 2 三维激光扫描仪对某建筑物进行扫描。 其实例为:扫描时,前端有树木等遮挡物被扫描入点云数据中(如图3 所示)。 为了消除这些粗差,采用以稳健平面拟合算法编制的程序对原始点云数据进行处理。 从图4 中可以明显地看出,进行粗差处理后的点云数据中不存在明显的树木信息、孤立点等,粗差剔除的效果良好。
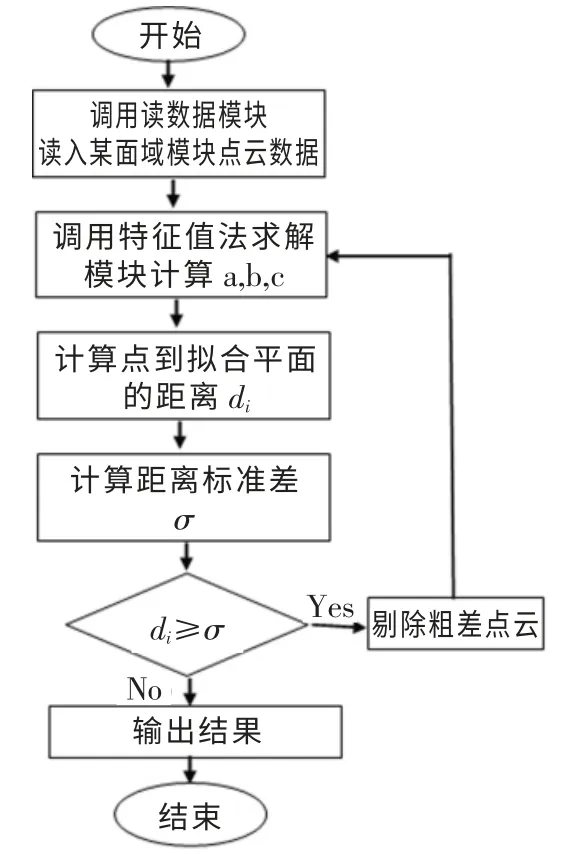
图2 粗差剔除程序框图Fig.2 Gross error rejection program frame

图3 原始点云图Fig.3 Original point cloud
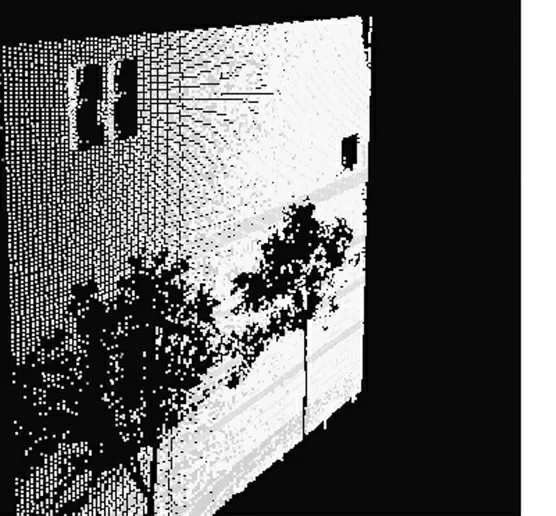
图4 处理后的点云图Fig.4 Point cloud after handling
3 结论
建筑物相差剔除研究为三维激光扫描在数字城市建设中的应用做了有益的探索。 两种方法各有优点。
(1)稳健平面拟合算法针对建筑物平面特征较多的特点,先将建筑物切割成平面,再分别对各个面进行平面拟合。 拟合后,根据点云到平面的距离,判断是否剔除。 剔除可以一次完成,也可以分多次迭代进行,以获得更高质量的点云和拟合平面。 该法同时也解决了三维激光扫描海量点云数据处理耗费大量时间的问题。
(2)用稳健平面拟合算法进行粗差剔除,其中通过计算距离的标准偏差,取二倍粗差剔除限值,算法简单明了,理论严密,使得剔除结果更具科学性和实用性,易于编程实现,具有一定的实用价值。 为了验证算法的可行性和稳健性,采用真实数据进行实验。经过计算、分析、比较,结果证明了算法的正确性。
[1] 顾朝林,段学军.论“数字城市”及其三维再现关键技术[J].地理研究,2002,21(1):14-24.
[2] Jia C D,Hung C T.3D Laser Scanning and GPS Technology for Landslide Earthwork Volume Estimation[J].Automation in Construction.(2007)16:657-663.
[3] 周克勤, 赵煦, 丁延辉. 基于激光点云的3 维可视化方法[J]. 测绘科学技术学报,2006,23(1):69-72.
[4] 官云兰,程效军,施贵刚.一种稳健的点云数据平面拟合方法[J].同济大学学报:自然科学版,2008,36(7):981-984.
猜你喜欢
铁道建筑技术(2021年4期)2021-07-21
金属加工(冷加工)(2020年11期)2020-11-24
小学生学习指导(低年级)(2019年9期)2019-09-25
模具制造(2019年3期)2019-06-06
测控技术(2018年5期)2018-12-09
精密制造与自动化(2018年1期)2018-04-12
设备管理与维修(2016年5期)2016-03-16
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
小天使·二年级语数英综合(2015年12期)2015-12-04
现代营销·经营版(2015年3期)2015-04-20
