
上肢可达工作空间的重建
2012-12-03 14:51吉晓民
中国机械工程 2012年21期
李 倩 吉晓民 高 峰
西安理工大学,西安,710048
0 引言
工作空间设计[1]是人机工程学研究的一个主要内容,其任务是根据人的操作活动要求,对被操作对象进行合理的布局和安排,以达到操作安全可靠、舒适方便的目的。在工作空间设计中,人体上肢末端的可达空间设计是一项重要内容。人体上肢末端所能达到的三维空间范围称为上肢可达工作空间[2]。可达空间的研究不仅有助于工作空间的设计,还可为人体的姿态设计提供依据[3]。在对上肢可达空间的设计中,一个首要问题是如何对上肢系统进行运动学建模。Denavit等[4]提出了对两连杆系统进行运动学分析的方法。该方法采用坐标系变换思想分析连杆之间的相对运动。受这一思想启发,在随后的研究中,国内外很多学者分别结合各自的实际背景,对人体上肢建立过不同的运动学方程,例如,文献[5]在对人体上肢仿生机构设计中建立的五自由度人体上肢模型,文献[6]在对列车乘务员作业区的研究中建立的九自由度人体上肢模型,文献[7]在仿人机器人复杂设计中用到的六自由度人体上肢模型。总之,由于上肢运动非常复杂,结合具体的实际背景,对其进行合理的运动学建模,是不同学科领域的共同课题。
人们最早采用清单式或演练式进行工作空间的人机评价。清单式主要指,以清单的形式列出需要满足的可达性指标,以此来构建机械设备的设计方案。演练式主要指人们首先制作出设备的样品模型,然后通过大量的可达性测试与比较,积累充足的经验数据以修正原设计方案,必要时上述过程反复循环,直到得到满意的设计方案为止。显然,上述的人机分析与评价方法适宜于简单、成本低的机械设备,对于大型、复杂的机械设备,由于设计周期长、成本代价高,因而存在明显的不足。随着科学技术的迅猛发展,人机分析与评价不再局限于传统的数据积累等应用范畴[8],计算机的高效能图形图像计算能力为人机工程学提供了新的研究手段和评价方法。虚拟人体模型作为计算机辅助人机工程设计的关键技术[9],可以大大提高人机评价系统的交互性和沉浸感,目前,虚拟人体模型和虚拟环境空间的研究是国际人机工程学的热点之一[10-12]。然而传统研究方法在涉及虚拟人上肢可达作业空间时,往往简单地把整个肢体简化成一根杠杆,将以肩关节为圆心、整条手臂为半径的球面来作为上肢的可达空间范围。这种方式误差大,忽略了腕关节、肘关节的存在,不能真实地反映可达范围,已无法满足不断提高的人机工程评估需要。
鉴于上述两方面的讨论,为提高虚拟人模型在人机系统可及性评估中的有效性,本文从人体的生理结构出发,构建了较为接近人体动作机能的七自由度上肢运动模型,基于该模型计算出虚拟人上肢的所有可达作业空间点,将曲面化的三维可及范围数字模型绑定到虚拟人体中,进行静态和动态的可及性评估。
1 上肢可达空间点的参数化求解
由人体解剖学[13]可知,人体上肢的运动主要由肩关节、肘关节和腕关节的相对运动来实现。用三连杆组成的铰链机构来模拟人体上肢系统,则手在空间中的可达点由上臂绕肩关节、前臂绕肘关节及手掌绕腕关节的7个自由度来决定[14]。齐次坐标是描述图形平移、旋转、缩放等几何变换的有效表示方法,为了便于用齐次坐标变换描述人体上肢可达点的位姿,可令上肢初始位姿为侧平举且掌心向下,并在此位姿下建立各连杆间的相对运动坐标系,如图1所示。图1中的点O、O1和O2分别代表肩关节、肘关节和腕关节,端点P代表上肢的末端,则OO1、O1O2、O2P分别代表长度为l的上臂、长度为m的前臂和长度为n的手。在每个关节上设置相对坐标系,并以肩关节的中心为绝对坐标系的原点。在初始位姿下,绝对坐标系与各相对坐标系的轴向一致,以手臂自然水平向外的方向为X轴方向,Z轴竖直向上,Y轴按右手定则确定。
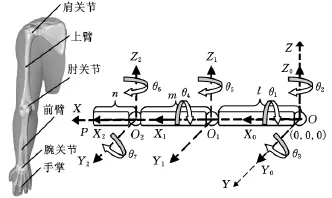
图1 上臂的三连杆简化机构
1.1 上肢可达点的运动方程
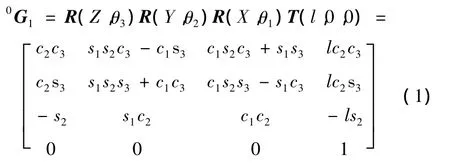
总的齐次矩阵G应根据旋转、平移运动的先后次序按左乘以相应的齐次矩阵(R(X,φ),R(Y,φ),R(Z,ω)或T(a,b,c))来实现。图1中,下标“0”表示肩关节,“1”表示肘关节,“2”表示腕关节,“3”表示手的末端点P,则肘关节相对于肩关节的总变换矩阵为
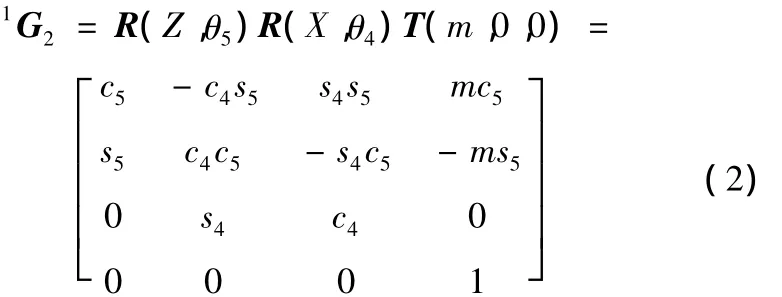
腕关节相对于肘关节的总变换矩阵为
末端P点相对于腕关节总变换矩阵为

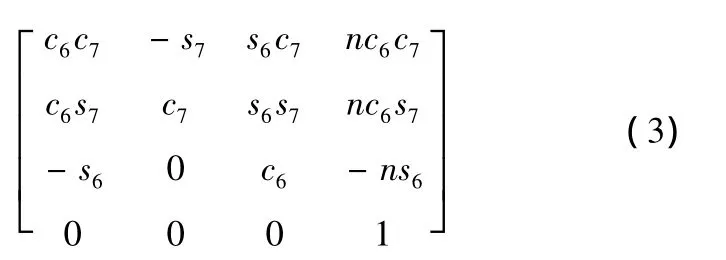
式中,si=sinθi,ci=cosθi,i=1,2,…,7。
将各连杆变换矩阵相乘,得到上肢末端P点相对于绝对坐标系的总变换矩阵:

P点相对于绝对坐标系原点的齐次坐标为

若给出上臂、前臂、手的具体长度,以及旋转角θi的变化范围,就可以求出上肢末端的所有可达空间点,也就是(xP,yP,zP)的集合。
1.2 计算结果及分析
根据GB10000-88中国成年人人体尺寸第50百分位的数据标准,以成年女性为例,取上肢运动链的有关常量为上臂长284mm,前臂长213mm,手长165mm。在计算上肢的可及范围时,须根据不同的被操作器件来调整手的计算用尺寸,具体的修正值如表1所示。本文以按压操作为例,经修正后的手长为 153mm。按照GB5703-85《人体尺寸测量方法》对人体上肢在初始位姿下的各关节活动范围进行测量,具体的测量值如表2所示。
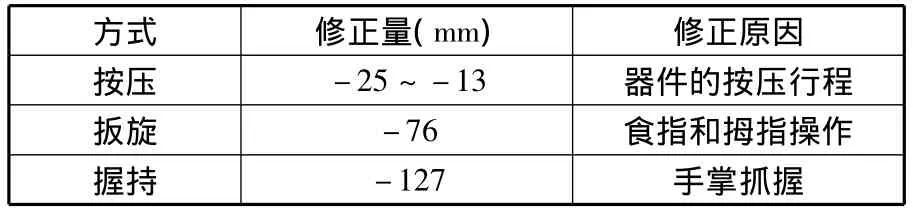
表1 手的尺寸修正
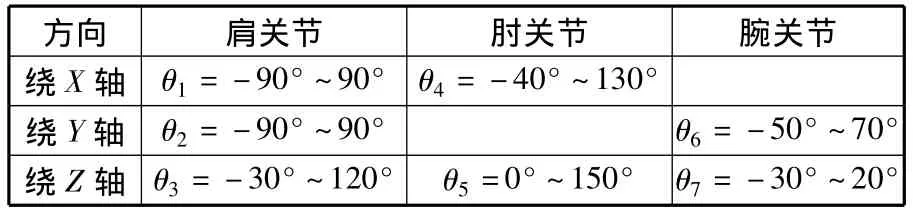
表2 各自由度的活动范围
将人体上肢各部分具体尺寸及各关节变量的活动范围代入上肢末端的运动方程,并对7个自由度的旋转方向进行7次循环计算,以间隔10°的角度变化求得所有可达点的坐标值。经计算,共得到129 752 064个可达点,由于不同的动作姿态可能会到达相同的位置,因而这些可达点中,很多是重复、冗余的点,它们占用了大量的存储空间。另外,可达点之间呈离散化分布,难以分辨出点云整体的几何特性,不适于实际需求。为解决上述问题,下文提出了对点云优化提取和进一步重构的方法。
2 可达空间的曲面建模
为了节约存储空间并应用于人机评价,需将散乱的点云转化为具有几何特性的三维实体模型。
2.1 散乱点云的边界提取
利用空间剖分法可以去除大量的冗余点并提取出关键的特征点,从而可以实现点云边界的快速提取,有助于点云的曲面重构。具体步骤如下:
(1)空间剖分。已知点云E由M个可达点组成,记点云 E={ei|i=1,2,…,M}。设点云E 的立方体包围盒为空间区域V,将该立体区域等分为N×N×N个小立方体,对每一小立方体编号,记其 编 号 为 qj,k,r(如 q1,1,1=1,q1,1,2=2,…,qN,N,N=N3),相应的小立方体记为 V[qj,k,r],记小立方体的全体编号集合 Q={qj,k,r|i,j,k=1,2,…,N}。
(2)点云优化。初始化D为空集。∀ei∈E,即对点云E中的每个点ei,判断点ei是否属于V中的某个小立方体 V[qj,k,r],若属于,则 D ← D ∪{V[qj,k,r]}。符号“←”表示赋值,“∪”表示并集运算,且先做并集运算再赋值,下同。
(3)边界点提取。初始化 B为空集。∀qj,k,r∈ Q,若 V[qj,k,r]∈ D(仅对属于集合 D 的小立方体 V[qj,k,r]),则进行下列操作:访问V[qj,k,r]的 相 邻 立 方 体 V[qu,v,w],这 里 (u,v,w)∈Ψ,Ψ ={(j ± 1,k,r),(j,k ± 1,r),(j,k,r± 1)},若存在某个 V[qu,v,w]∉ D,则 B ← B ∪{V[qj,k,r]}。易知,集合 B 即为集合 D 对应的空间区域的边界。
(4)点坐标输出。∀qj,k,r∈ Q,若 V[qj,k,r]∈B(仅对于属于集合 B 的小立方体 V[qj,k,r]),则进行下列操作:计算出该小立方体的中心坐标(x(j,k,r),y(j,k,r),z(j,k,r)),记 这 些 点 的 集 合 C ={(x(j,k,r),y(j,k,r),z(j,k,r))|V[qj,k,r]∈ B},最后将 C输出为文本。
按照以上的方法对原始可达点数据进行优化提取。已知上肢总长为650mm,定义以(-660,-660,-660)和(660,660,660)为对角点且表面平行于坐标平面的空间六面体为点云的空间包围盒,将该包围盒剖分成100×100×100个小立方体,经计算后,可提取到5303个边界点,如图2所示。

图2 Rhino软件下的边界点云模型
2.2 曲面重构
曲面重构技术是逆向工程的重要组成部分。由于经优化后的边界点云数据质量较好,因此可采用现有的多种方法和逆向软件等进行曲面重构。本文采用Geomagic Studio软件来对边界点云曲面重构,Geomagic Studio可根据任何实物零部件通过扫描点云自动生成准确的数字模型[16]。
用Geomagic Studio重构本文的边界点云非常简便,首先打开点云文本,然后进行封装,系统将把所有的点变成三角网格面,接着进行填充孔操作,即清理有问题的三角面并重新填补,最后进行松弛来优化网格,使得网格光滑。图3所示分别为初始点云模型、封装后的多边形网格模型,以及松弛后的光滑曲面模型。最终光滑曲面模型几何轮廓清晰,实体感强。
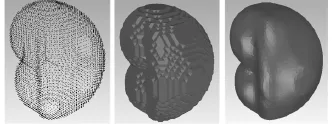
图3 曲面重构过程
3 实例应用
随着时代的发展,用户对机械设备的人性化和美观性要求越来越高,越来越多的企业日益重视机械设备的造型设计及人机评估。将重建好的可及空间模型绑定到虚拟人上,将该虚拟人应用于人机工程的可及性评估之中,能够确保空间设计的合理性,并进一步优化设计方案。因而,这种可及性评估方法具有重要的应用价值,可应用于机械、仪表和控制器的设计,寻求控制台上各个仪器、仪表的最佳摆放位置,评估车辆、飞机驾驶室(舱)器件布局的合理性等。
首先加载虚拟人到场景中,将可及空间模型的局部坐标系原点移动到虚拟人的肩关节中心部位并进行绑定,如图4所示。然后驱动虚拟人进行静态或动态操作,观测者可以设置固定的视点位置,或采用360°方式来查看可及空间模型与设备之间的相对位置关系,从而达到可及性评估的目的。需要注意的是,在对可及空间模型进行双面混合绘制时,可及空间模型颜色透明度设置为20%,该设置能使虚拟人、可及空间模型、场景中的设备这三者之间的相对位置关系达到较佳的可视化效果。基于上述步骤进行评估,若部件处于可及空间内,则可认为该部件布局合理;若调节虚拟人姿态后,某些部件仍处于可及范围之外,则认为该部件布局不合理。

图4 可达模型绑定到虚拟人
图5为虚拟人在场景中对挖掘机驾驶室布局进行可及性评估的截图。驾驶室内,驾驶员不仅要随时观察仪器、仪表的指示结果,而且要及时地做出反应,并完成合理的操作。这就要求驾驶室内一切仪器、仪表、操作按钮、控制器和方向盘等均应在可及范围以内。我们以虚拟人右肢对驾驶室方向盘操作为例来说明。图6中,方向盘在可及性评估时被分为了3种不同属性的颜色区域[17]:①深灰色区域表示不在可及范围之内;②中灰色区域表示被可及模型遮挡,也不在可及范围之内;③浅灰色区域处于可及范围内。以此可检测设备布局的合理性。如果进一步将右肢可及范围与左肢可及范围结合,则可得到更为精准的可及范围,因此布局设计将会进一步优化。通过上述可及性评估,可以检测出不合理的布局设计,进而调整操纵器件的布局,确保驾驶员处于最优的驾驶状态。
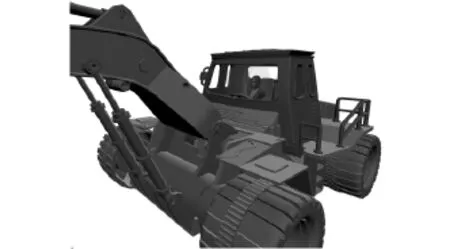
图5 可及性评估截图

图6 方向盘的可及性评估
4 结语
本文首先构建了七自由度的人体上肢参数化运动方程,基于该方程,可以得到关节转动范围内的所有空间可达点。由于可达点之间存在大量的重复、冗余,不仅占用了大量存储空间,而且不利于进一步分辨点云的几何特性,为了解决这一问题,本文提出了对散乱点云边界优化提取的具体实施算法。基于该算法,优化后的离散边界点数量显著减小。最后根据这些离散边界点来实现曲面重构,可以得到形象直观的三维模型。在实例仿真中,将可及空间的模型绑定于虚拟人体,通过驱动虚拟人做静态或动态的可及性评估,提高了各类人机操控界面设计的宜人性。
[1]丁玉兰.人机工程学[M].北京:北京理工大学出版社,2005.
[2]黄献龙,梁斌,陈建新,等.EMR系统机器人工作空间与灵活性的分析[J].机械工程学报,2001,37(2):12-16.
[3]张鄂,洪军,李彦山,等.汽车人机界面人体上肢位姿建模与优化研究[J].西安交通大学学报,2008,42(5):546-550.
[4]Denavit J,Hartenberg R S.A Kinematic Notation for Lower- pair Mechanisms Based on Matrices[J].Journal of Applied Mechanics,1955,77:215-221.
[5]李蔓华.5自由度人体上肢仿生机构的运动建模及研究[D].天津:天津轻工业学院,2000.
[6]方卫宁,郭北苑.机车乘务员空间作业域判定方法的研究[J].北方交通大学学报,2001,25(1):61-66.
[7]张利格,毕树生,高金磊.仿人机器人复杂动作设计中人体运动数据提取及分析方法[J].自动化学报,2010,36(1):107-112.
[8]罗仕鉴,孙守迁,唐明晰,等.计算机辅助人机工程设计研究[J].浙江大学学报(工学版),2005,39(6):805-809.
[9]卢兆麟,汤文成.工业设计中的人机工程学理论、技术与应用研究进展[J].工程图学学报,2009,30(6):1-9.
[10]Maatta T J.Virtual Environments in Machinery Safety Analysis and Participatory Ergonomics[J].Human Factors and Ergonomics in Manufacturing,2007,17(5):435-443.
[11]Lamkull D,Hanson L,Ortengren R.The Influence of Virtual Human Model Appearance on Visual Ergonomics Posture Evaluation[J].Applied Ergonomics,2007,38(6):713-722.
[12]Siefert A,Pankoke S,Wolfel H P.Virtual Optimization of Car Passenger Seats:Simulation of Static and Dynamic Effects on Drivers’Seating Comfort[J].International Journal of Industrial Ergonomics,2008,38(5/6):410-424.
[13]邹锦慧,刘树元.人体解剖学[M].北京:科学出版社,2005.
[14]袁清珂,骆少明,唐文艳,等.人体上肢运动学动力学建模与仿真技术的研究[J].计算力学学报,2010,27(2):321-324.
[15]殷际英,何广平.关节型机器人[M].北京:化学工业出版社,2003.
[16]Giovanna S,Franco D.In - field Performance of an Optical Digitizer for the Reverse Engineering of Free - form Surfaces[J].The International Journal of Advanced Manufacturing Technology,2005,26:1353-1361.
[17]李倩,吉晓民,林文周.人机系统中视域评估的可视化研究[J].中国图象图形学报,2012,17(5):715-720.
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
考试周刊(2018年74期)2018-08-20
读者(2018年15期)2018-07-18
中国自行车(2018年4期)2018-05-26
中学生天地(A版)(2017年6期)2017-06-23
郑州大学学报(工学版)(2017年2期)2017-05-18
制造业自动化(2017年2期)2017-03-20
计算机应用(2016年7期)2016-07-19
太空探索(2016年9期)2016-07-12
小学生导刊(低年级)(2016年6期)2016-07-02
