
基于质量块翻转的MEMS万向惯性开关
2012-12-01 02:11李晓杰牛兰杰田中旺
探测与控制学报 2012年6期
李晓杰,牛兰杰,翟 蓉,殷 群,田中旺
(1.机电动态控制重点实验室,陕西 西安 710065;2.西安机电信息技术研究所,陕西 西安 710065)
0 引言
引信惯性开关利用载体碰击目标时的反作用力或前冲惯性力而闭合,接通引信发火控制电路,是机电引信实现触发起爆或落地自毁功能的重要部件,武器弹药中有广泛的需求。
传统惯性开关受加工工艺的限制,存在体积较大、阈值散布大、万向性能差等缺点,难以满足引信微小型化、灵巧化及多功能化发展的要求。在一些引信研制中曾出现引信弹道炸和碰目标迟滞炸等现象,只能采用加严筛选的方法来保证开关的灵敏度,批成品率不到50%,大幅度增加了研制成本和生产周期。
相对于传统惯性开关,基于MEMS技术的惯性开关,采用MEMS工艺将质量-弹簧系统制作成一体,可减小弹簧刚度散布,同时采用多弹簧系统,可较好解决不同方向上灵敏度基本一致的问题。将处理电路与微机械融合,使开关闭合时间与过载持续时间相关,则可大幅提高惯性开关一致性、可靠性。
美国 Robinson[1]、国内吝海锋[2]研制的 MEMS万向惯性开关,实现了径向360°以及轴向碰撞触发,但灵敏度相差较大。陈光焱[3-4]设计了一种悬臂梁式微惯性开关,杨卓青[5-6]设计了基于非硅表面工艺的微惯性开关,两者均为单向开关,不具备万向功能。
针对现有惯性开关万向性能差的缺点,本文设计了一种基于质量块翻转的MEMS万向惯性开关。
1 典型万向惯性开关
引信MEMS惯性开关结构是典型的“弹簧-质量-阻尼”系统,如图1所示,即质量块经弹簧与阻尼器与壳体相连,当惯性力达到一定阈值时与触点接触,开关闭合电路接通。在惯性激励a(t)作用下,系统可简化为单自由度碰撞振动系统,其力学平衡方程为:

式中,m为质量块质量;x为质量块位移;c为阻尼系数;k为弹性系数。

图1 弹簧-质量-阻尼系统示意图Fig.1 Mass-spring-damper model
MEMS惯性开关主要由动电极和固定电极组成。动电极采用弹簧悬挂质量块的结构,固定电极位于其上方或者侧方,两电极间距根据阈值大小设定。为实现惯性开关多个方向的触发闭合,可以设计多个固定电极,分别位于质量块的不同方向。参考文献[1—2]就是采用在质量块径向以及轴向分别设计固定电极的方式,实现了惯性开关径向360°以及轴向触发闭合。
在MEMS惯性开关中,系统的惯性力、阻尼力等多种物理场耦合作用结果直接决定开关的响应特性。为准确预测惯性开关在实际工作中的响应特性,需要对开关结构进行静态、模态、瞬态等仿真,分析其响应阈值、响应时间、闭合时间、响应角度及抗高过载能力等,目前常采用ANSYS作为仿真软件。
2 基于质量块翻转的MEMS万向惯性开关
惯性开关采用图2所示的结构,由盖板、质量块、锚点、限位柱、微弹簧和基板组成,图中X轴正向为弹丸飞行方向。质量块为动电极,由均布的弹簧悬挂,弹簧厚度远小于质量块厚度;开关盖板为固定电极,与质量块平行并保持一定的间距。在加速度作用下,质量块克服弹簧拉力运动,当其运动位移达到设定间距时,与开关盖板接触,开关闭合。为约束质量块因离心力的作用在YZ平面内的平动以及绕X轴的转动,在基板上设计有限位柱。
当惯性开关受到X轴正向惯性力的作用时,质量块直接与固定电极表面接触提供导通信号;当受到其他方向的加速度冲击时(X轴分量为正),将惯性力分解到X轴方向以及YZ平面内:惯性力在X轴的分量使得质量块沿X方向运动。由于质量块质心高于悬挂弹簧,惯性力在YZ平面的分量会产生翻转力矩,质量块会产生翻转。借助于质量块的翻转,较小的X向惯性力即可使得质量块节点的位移达到设定间距,与固定电极接触,电路导通,实现惯性开关大着角碰撞触发。
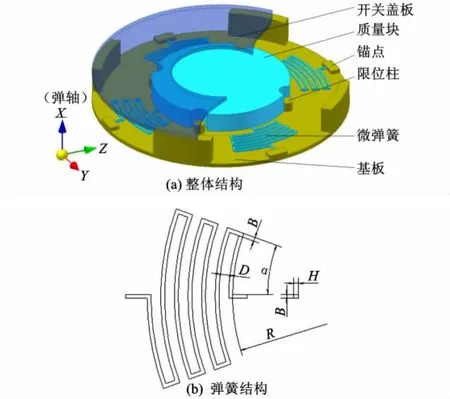
图2 惯性开关结构图Fig.2 Structural drawing of inertial switch
3 惯性开关动态响应特性分析
3.1 可动结构模态分析
惯性开关设计加速度阈值为100 g,质量块和弹簧材料为镍,其弹性模量为210GPa[7],泊松比为0.31,密度为8.91×103kg/m3,屈服应力为317 MPa。惯性开关结构参数见表1,B为弹簧宽度,H为弹簧厚度,D为弹簧相邻圆弧段之间的距离,R为弹簧圆弧段的最小半径,α为弹簧张开角度,n为弹簧节数,Φ为质量块直径,H0为质量块厚度,h为质量块与开关盖板质量之间的间距。

表1 惯性开关结构参数Tab.1 Material parameters of the switch
按结构参数,建立实体模型,导入ANSYS,对 惯性开关可动结构进行模态分析,结果如图3所示。
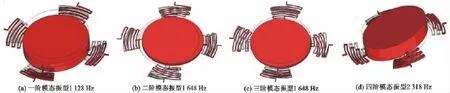
图3 模态仿真结果Fig.3 Simulation results of modal analysis
相对于器件结构,一阶模态振型沿X方向运动,二阶、三阶模态振型沿Y、Z方向运动,两者振动频率相同,四阶、五阶模态为绕Y、Z方向的转动,即质量块产生翻转,与YZ平面形成角度。由于安装时惯性开关质量块质心可能偏离弹丸轴线,在弹丸高速旋转时会受到的YZ平面内离心力,因此,在基板上设计有限位柱(见图2),以约束质量块在YZ平面内的运动,使惯性开关工作于一阶模态、四阶模态以及五阶模态。
3.2 加速度响应阈值
选取半正弦曲线作为惯性开关载荷曲线[5-6],加载方向为X轴正向,持续时间为400μs,改变加载曲线幅值的大小,通过ANSYS瞬态动力学仿真分析惯性开关可动结构的运动情况(如图4),得出开关的响应阈值。

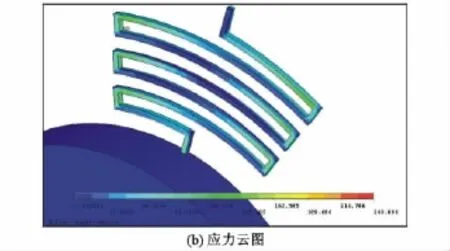
图4 瞬态动力学分析结果Fig.4 Simulation results of transient analysis
当加速度达到93 g时,质量块X向的位移约为25μm,达到与固定电极接触的临界状态,故惯性开关闭合阈值为93 g。这与设计阈值100 g存在一定误差,误差主要来源于设计中对弹簧弹性系数及压膜阻尼的近似。运动过程中,器件承受的最大应力为244MPa,小于镍的屈服应力,表明开关结构安全。
惯性开关加工工艺采用准LIGA技术[8]。加工过程中电镀液条件、杂质以及电流密度会显著影响电镀镍的材料特性,而镍的弹性模量会直接影响弹簧弹性系数,进而影响开关的动态特性[9]。国内外研究表明,LIGA电镀镍的弹性模量散布为205~228MPa[7]。为估算镍的弹性模量对开关性能的影响,计算在极限情况下惯性开关的闭合阈值,得到结果:当电铸镍弹性模量最小时,惯性开关闭合所需的惯性载荷最小,约85 g;反之,开关闭合所需载荷最大,约102 g。因此,惯性开关理论闭合阈值为85~102 g,误差约15%。
3.3 响应角度及持续时间
要使惯性开关响应角度达到预定值,惯性开关必须工作在四阶或五阶模态,即质量块必须翻转以保证其边缘能与固定电极接触。改变载荷(半正弦曲线,持续时间为400μs,幅值为100 g)加载方向,分析载荷角度对惯性开关闭合特性的影响,每个角度选取质量块上包括位移最大、最小在内的4个节点,得到图5所示仿真结果,图中标注角度为载荷与弹轴方向的夹角。
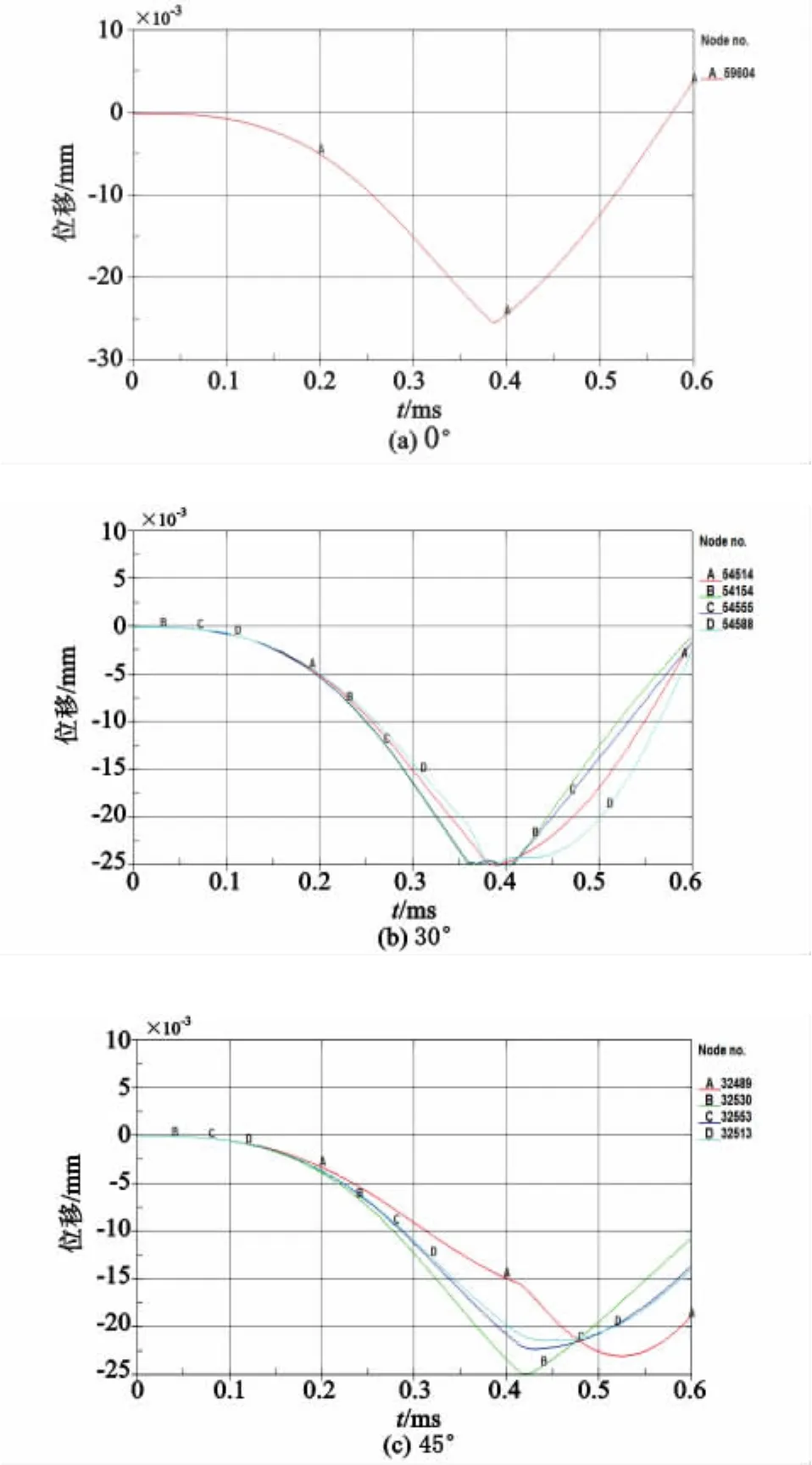
图5 质量块节点位移-时间曲线Fig.5 Displacement-time curves
从图5质量块节点位移-时间曲线可以看出,在载荷为100 g的情况下,加载角度小于70°时,质量块节点位移可达到25μm,惯性开关均可以闭合;当角度达到70°时,开关处于临界闭合状态。对比同一角度下节点位移-时间曲线可知,除0°以外,质量块均发生翻转,与固定电极的接触点为其边缘。因此,质量块的翻转可实现惯性开关大于120°的触发闭合。
在此基础上,进一步分析各角度下惯性开关的响应阈值。结合图5,归纳得到各角度开关的动态特性,见表2。从表中可以看出,载荷加载角度小于70°时,惯性开关的响应阈值为92~112 g,灵敏度误差为22%,响应时间0.3~0.41ms,闭合持续时间10~15μs。
表2 惯性开关各角度响应时间、接通时间及阈值Tab.2 Dynamic response characteristics of the switch
3.4 抗高过载能力
按照图6中榴弹发射后坐过载曲线[10]施加惯性载荷,得到仿真结果如图7所示。图7(a)为在后坐力作用下质量块节点位移-时间曲线,图7(b)为最大应力云图。在30 000 g的载荷下,器件所受的最大应力位于弹簧的弯角处为232MPa,小于镍的屈服应力,表明该结构抗高过载能力超过30 000 g。

图6 发射后坐过载曲线Fig.6 Recoil force of launch

图7 抗高过载仿真结果Fig.7 Simulation results of high-shock-resistant
同时,质量块在碰撞到基板后的反弹位移约为10μm,小于质量块与固定电极间的固定间隙25μm,即惯性开关不会因后坐力而导致惯性开关误闭合。
4 结论
本文设计了一种基于质量块翻转的MEMS万向惯性开关。开关选取弹簧悬挂质量块作为动电极,开关盖板作为固定电极,利用质量块的翻转,实现了大着角碰撞触发。仿真验证了:惯性开关可以实现大于120°的触发闭合,阈值散布小于15%,灵敏度散布约22%,并具有一定的抗高过载能力,为后续工作奠定了理论基础。
[1]Robinson.Omnidirectional microscale impact switch:US,6765160[P].2004.
[2]吝海锋,何洪涛,卞玉民,等.一种新型无源 MEMS万向碰撞开关[J].微纳电子技术,2009,46(6):358-361.LIN Haifeng,HE Hongtao,BIAN Yumin,et al.Novel passive MEMS universal crash switch[J].Micronanoelectronic Technology,2009,46(6):358-361.
[3]陈光焱,王超.微惯性开关设计技术综述[J].信息与电子工程,2009,7(5):439-442.CHEN Guangyan,WANG Chao.Review of the design of micro inertial switch[J].Information and Electronic Engineering,2009,7(5):439-442.
[4]陈光焱,杨黎明.一种高g值微冲击开关的研制[J].爆炸与冲击,2007,27(2):190-192.CHEN Guangyan,YANG Liming.Fabrication of a high-g micro impact Switch[J].Explosion and Shock Waves,2007,27(2):190-192.
[5]Yang Zhuoqing,Ding Guifu,et al.A MEMS inertia switch with bridge-type[J].Transaction on Electron Devices,2008,55(6):2 492-2 497.
[6]Cai Haogang,Ding Guifu,Yang Zhuoqing,et al.Design,simulation and fabrication of a novel contact-enhanced MEMS inertial switch with a movable contact point[J].Journal of Micromechanics and Microengineering,2008:1-10.
[7]郑立兵,石庚辰,韩立.基于LIGA工艺的电铸镍材料特性[J].功能材料与器件学报,2010,16(3):222-226.ZHENG Libing,SHI Gengchen,HAN Li.Material characteristic of LIGA[J].Journal of Functional Materials and Devices,,2010,16(3):222-226.
[8]石庚辰.可用于 MEMS加工的金属粉末注射成型工艺[J].探测与控制学报,2010,32(3):1-5.SHI Gengchen.Metal powder Injection molding for MEMS processing[J].Journal of Detection & Control,2010,32(3):1-5.
[9]黄庆安.微机电系统基础[M].北京:机械工业出版社,2007.
[10]牛兰杰,张建,赵旭.基于有限元法的 MEMS后坐保险机构运动特性分析[J].探测与控制学报,2006,28(4):15-18.NIU Lanjie,ZHANG Jian,ZHAO Xu.The dynamics research of MEMS setback arming device based on ansys/ls-dyna[J].Journal of Detection & Control,2006,28(4):15-18.
猜你喜欢
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
煤矿机电(2021年6期)2022-01-19
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
科技与创新(2021年1期)2021-01-19
校园英语·中旬(2019年11期)2019-11-26
中学物理·高中(2019年8期)2019-09-20
科技创新与应用(2018年27期)2018-09-29
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
竞争力(2009年3期)2009-04-08
