
基于遗传算法的磁干扰补偿方法
2012-12-01 02:11伍东凌陈正想
探测与控制学报 2012年6期
伍东凌,陈正想,王 秀
(中国船舶重工集团公司第七一〇研究所,湖北 宜昌 443003)
0 引言
航空磁性探测广泛应用于考古、矿物勘探和水中磁性目标探测等领域,而地磁场和飞机磁干扰场会叠加在磁性目标信号的测量结果中,因此,要实现对微弱磁性目标信号的精确探测,必须对飞机自身和运动引起的干扰磁场进行补偿。这就要对飞机磁干扰场的组成和特性进行研究,建立准确的数学模型,用合适的方法求解出模型系数,从而对磁干扰进行补偿,提高磁探质量。
20世纪40年代,美国学者最早开始对飞机干扰磁场的数学模型进行研究,参考文献[1]中给出了飞机干扰磁场的数学建模。由于模型具有较强的复共线性,他们未对模型的求解和干扰磁场的实时补偿提出有效的方法。在其后几十年时间,国内外一些专家学者相继提出各种模型系数求解方法。参考文献[2]提出了小幅度机动磁干扰补偿方法,但这种方法是建立在飞机做小幅度机动的条件下,具有一定的局限性且求解的精度不高。参考文献[3]研究了截断奇异值分解的飞机干扰磁场模型求解算法,此方法对奇异值截断位置比较敏感,如截断位置选择不合理,会使估计误差迅速增大。针对上述问题,本文提出了基于遗传算法的磁干扰系数求解方法。
1 飞机磁场模型求解分析与遗传算法
1.1 飞机磁场模型求解分析
飞机干扰磁场包括硬磁恒定干扰场、软磁感应干扰场和涡流干扰场,本文采用文献[1]中的模型来描述干扰磁场。建立坐标系如图1所示,x轴与飞机纵轴平行,机首方向为正,y轴与飞机横轴平行,向右方向为正,z轴与平面xOy正交,向下方向为正。α,β,γ为H 和3个坐标轴之间的夹角,其方向余弦为cosα,cosβ,cosγ。

图1 飞机磁场坐标系Fig.1 Coordinates of aircraft magnetic field
在实际测量中,可用高精度光泵磁强计测量含干扰外部磁场的总场H,三轴磁强计测量含干扰外部磁场的3个方向余弦cosα,cosβ,cosγ,从而可得三轴方向上含干扰磁场的输出Hx,Hy,Hz。
作为一种算法研究,本文暂不考虑涡流场干扰,则由参考文献[1]可知磁场模型为:
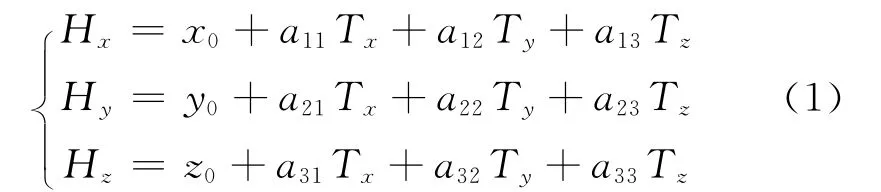
为求解补偿系数,可选取一处地磁场较为稳定的区域让飞机飞行,以测量三轴上的磁场输出Hx,Hy,Hz,由式(1)可得:
则总场输出:

此时总场输出O1为一个固定的当地地磁总场值,此式可作为遗传算法适应度函数的输入,用于求解12个补偿系数。
假设存在目标信号,目标信号在三轴上的分量分别为Sx,Sy,Sz,由式(1)得:

此时总场输出:

由式(6)可知,利用求解出的补偿系数,可得到总场输出O2,其包含地磁场与目标信号,而我们只关心目标信号的大小,故可采用式(7)作为系统输出O。

式(7)中,

为一个总场常数,即飞机远离目标达到一定距离,目标信号趋近于0时的总场输出。由式(7)可知,存在目标信号时,系统输出即为目标信号。
1.2 遗传算法简介
遗传算法是一种模拟自然界生物进化过程,采用人工进化的方式对目标空间进行随机优化搜索的算法,它的适应度函数不受连续可微的约束,能很好地处理约束条件。遗传算法在搜索过程中能很好地跳出局部最优解,得到全局最优解。
遗传算法的主要运算过程包括:
1)编码。即把一个问题的可行解从其解空间转换到遗传算法所能处理的搜索空间。常用的编码方法有二进制编码与浮点数编码。
2)生成初始群体Chrom(0)。设置群体大小为M,采用随机初始化的方式产生包含M个个体的初始群体。
3)适应度值评价检测。适应度值函数表明个体或解的优劣性。对于不同的问题,适应度函数的定义方式不同。根据具体问题,计算群体中各个个体的适应度。
4)选择。根据每个个体适应度值大小选择,使得适应度较高的个体被遗传到下一代群体中的概率较大,适应度低的个体被遗传到下一代群体中的概率较小。
5)交叉。按一定的概率从群体中选择两个个体,交换两个个体的某个或某些位,从而形成两个新个体。交叉运算决定了遗传算法的全局搜索能力。
6)变异。将个体编码串中的某些基因座上的基因值用该基因座的其他等位基因来替换,从而形成一个新的个体。变异运算决定了遗传算法的局部搜索能力。
重复3)~6)至设定的最大遗传代数时停止,输出最优个体的解。
2 采用遗传算法求解飞机磁场模型
采用遗传算法求解飞机磁场模型补偿系数的主要步骤为:
1)编码。将12个待求解系数按浮点数编码方式进行编码,每个参数编码的取值范围如表1所示。这里采用浮点数编码方式是因为该编码方式适用于求解精度要求较高的场合,同时它也能提高运算效率。
2)初始化种群。经过编码后,会产生一个初始种群,这里选择初始种群的大小为200。较大数目的初始种群可在搜索空间中的更多解搜索,容易找到全局最优解。
3)根据适应度函数计算每个个体的适应度。按式(3)计算每个个体对所测得的每组外界磁场数据还原后的总场值,还原后的所有总场值标准差越小则适应度值越大。
4)选择。以轮盘赌的方式进行正比例选择,这里选择概率取0.8。适应度值越高的个体,被选中的可能性就越大,进入下一代的概率就越大。
5)交叉。按两两配对原则将群体中个体进行配对并进行交叉运算,这里交叉概率选为0.4,采用普通单点交叉方式进行。
6)变异。根据设定的概率进行变异操作,得到新一代个体,这里选择变异概率为0.05。
重复3)~6)至设定的最大遗传代数时停止,最后输出的最优个体解即为磁干扰模型补偿系数。

表1 遗传运算参数编码方式及取值范围Tab.1 Encoding and value range of genetic algorithm parameters
3 仿真验证
3.1 无目标信号时的仿真验证
为获取相关磁场数据,模拟飞机从地磁正北方向开始按顺时针方向飞行一周,测量飞机运动时光泵的总场输出和三轴磁力仪三轴输出数据。
假设所选取试验地区地磁场总场大小为51 200 nT,3 个 硬 磁 干 扰 参 数 为 [-694.02,831.32,229.87],9个软磁干扰参数分别为a11=1.037 9,a12=0.009 9,a13=0.021 6,a21=-0.006 2,a22=1.040 3,a23=-0.007 9,a31=-0.008 2,a32=0.030 1,a33=1.031 3,考虑当前三轴磁通门磁力仪静态噪声可达到0.1nT的水平,光泵磁力仪静态噪声水平可达到10pT左右,仿真中给三轴磁力仪加入0.1nT白噪声,给光泵加入10pT白噪声,利用这些假设条件,仿真生成的飞机飞行一周时光泵输出的磁场总场数据如图2所示,三轴磁力仪输出的三轴磁场数据如图3所示。

图2 飞机飞行一周时的总场输出Fig.2 Output of the geomagnetic total field with aircraft flying a lap

图3 飞机飞行一周时的三轴输出Fig.3 Output of the three-axis magnetometers with aircraft flying a lap
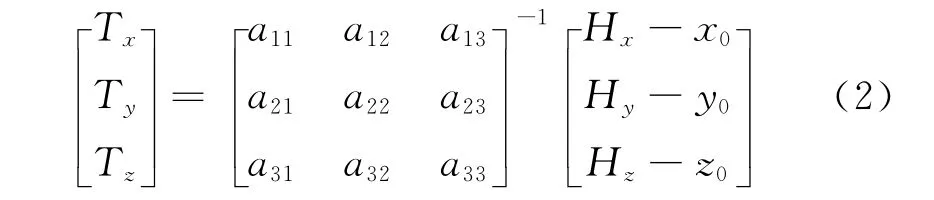
利用三轴磁力仪测得的数据计算3个方向余弦cosα,cosβ,cosγ,对光泵总场数据进行三轴方向上的分解,得到包含外界硬磁、软磁干扰的三轴分量Hx,Hy,Hz,将此组数据代入遗传算法程序中,以式(2)、式(3)为适应度函数,求解出最优补偿参数,利用补偿参数对磁干扰进行补偿后的系统输出如图4所示。从仿真结果可知,利用光泵与磁通门数据代入遗传算法可稳定求出有效的系统补偿参数,补偿后系统输出峰峰值优于20pT,效果较为理想。
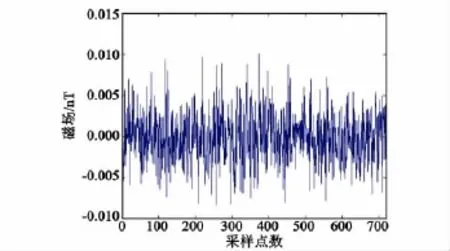
图4 补偿后的系统输出Fig.4 System output after compensation
3.2 有目标信号时的仿真分析
现在探测区域内加入一个模拟舰艇磁性目标,飞机模拟直线探测飞行,以验证系统还原微弱舰艇磁性信号的能力。
首先建立目标舰艇磁矩坐标系和飞机飞行坐标系,如图5所示。

图5 目标舰艇磁矩坐标系和飞机飞行坐标系Fig.5 Coordinates of target ship's magnetic moment and coordinates of aircraft flight
假定这两个坐标系原点重合,目标舰艇磁矩坐标系中x1轴与舰艇纵轴方向平行,指向船首为正,y1轴与舰艇横轴平行,指向船体右侧为正,z1轴与平面x1Oy1垂直,向下方向为正,构成右手坐标系;飞机飞行坐标系中x2轴与飞机直线探测飞行方向重合,前进的方向为正,y2轴与x2轴垂直指向左侧机翼为正,z2轴与平面x2Oy2垂直,向上方向为正,也构成一个右手坐标系。
目标舰船相对飞机为低速运动,可认为其在短时间内相对静止,假定其磁航向角为135°。根据舰艇磁偶极子模型[4],假定目标舰艇三轴磁矩分别为Mx=150 000A·m2,My=3 000A·m2,Mz=8 000A·m2。在飞行坐标系中,飞机的初始坐标假定为(-3 000,500,260),即飞机初始纵向距离为-3 000m,正横距离为500m,距离目标舰艇高度为260m。假定飞机沿磁航向角为315°方向作直线探测飞行。
该探测状态下,真实磁偶极子目标信号如图6所示,未进行干扰补偿时的系统输出如图7所示,采用基于遗传算法的磁干扰补偿方法进行补偿后,系统输出信号如图8所示。从这3个图中,我们可以很明显地看出,未经磁干扰补偿,微弱的磁异常信号彻底被湮没在较强的磁干扰中,而利用遗传算法求解出的补偿参数能有效还原微弱的磁性目标信号。
图6 磁偶极子目标信号Fig.6 Target signal of magnetic dipole

图7 未进行干扰补偿时的系统输出Fig.7 System output without magnetic compensation

图8 采用遗传算法进行干扰补偿的系统输出Fig.8 System output with magnetic compensation based on genetic algorithm
4 结论
本文提出基于遗传算法的磁干扰补偿方法。该方法利用光泵磁强计和三轴磁强计测得的数据作为系统输入,采用遗传算法求解出模型补偿参数的最优解,并利用补偿参数的最优解计算磁干扰的大小。从测得的外部总磁场中减去磁干扰,可得到目标信号磁场数据。仿真结果表明:采用遗传算法求解模型补偿参数的磁干扰补偿方法具有较高的补偿精度,具有一定的工程应用价值。
[1]Tolles W E,Lawson J D.Magnetic compensation of MAD equipped aircraft,Rep 201-1[R].New York:Airborne Instruments Lab Inc,1950.
[2]吴文福.16项自动磁补偿系统[J].声学与电子工程,1993,32(4):14-21.WU Wenfu.16automatic magnetic compensation system[J].Acoustics and Electronics Engineering,1993,32(4):14-21.
[3]庞学亮,林春生,张宁.飞机磁场模型系数的截断奇异值分解法估计[J].探测与控制学报,2009,31(5):48-51.PANG Xueliang,LIN Chunsheng,ZHANG Ning.Parameter estimation of airplane magnetic model based on TSVD[J].Journal of Detection & Control,2009,31(5):48-51.
[4]卢俊杰,陈正想,陈丽.一种磁梯度张量定位算法[J].磁学工程,2011,3(2):1-5.LU Junjie,CHEN Zhengxiang,CHEN Li.Localization algorithm for magnetic gradient tensor[J].Magnetics Engineering,2011,3(2):1-5.
猜你喜欢
计算机仿真(2022年8期)2022-09-28
汽车工程(2021年12期)2021-03-08
兵团工运(2019年1期)2019-12-15
兵团工运(2019年4期)2019-06-25
电子制作(2019年24期)2019-02-23
中国棉花加工(2019年3期)2019-01-11
中国棉花加工(2019年2期)2019-01-10
中央民族大学学报(自然科学版)(2017年1期)2017-06-11
当代旅游(2016年10期)2017-04-17
财经理论与实践(2015年2期)2015-04-16
