
模糊专家控制系统的最大风能追踪
2012-11-22 07:51:06姚兴佳王晓东单光坤井艳军
微特电机 2012年9期
刘 姝,姚兴佳,王晓东,单光坤,井艳军
(1.沈阳工业大学,辽宁沈阳110023;2.沈阳化工大学,辽宁沈阳110142)
0 引 言
能源与环境是当今人类生存和发展所要解决的紧迫问题,风力发电是除水力发电之外最成熟、最具规模开发和有商业化发展前景的发电技术。风能具有储存量大、分布性广、利用比较方便并且无污染等优点,因此大规模地开发和利用风能,具有较广阔的应用前景[1]。
目前在实际风电机组中,变速恒频风力发电系统已经被广泛地应用,它可以实时改变风力发电机的转速,使其运行于最优功率点,从而最大限度地捕获风能[2]。目前最大风能捕获控制方法主要有查表法、爬山搜索法、混合控制法等[3]。查表法操作简单,并且容易实现,还可以快速跟踪给定,然而它需要实时地测量风速,对风速变化率比较敏感,数据大多由风机厂家直接给出,所以容易受到环境变化和风电机组磨损等外部条件的影响,还容易造成偏离实际最优值;爬山搜索法往往需要预知风机的一些参数,因而参数的准确性直接影响控制的效果;混合控制法结合了查表法和爬山搜索法的各种控制优点,能够快速实时准确地捕获最优实际功率,但仍然需要实时测量风速,对风速变化相对敏感[4]。
为此,针对以上算法的不足和缺点,本文在低于额定风速工况下,利用专家经验和模糊技术,建立一套最大风能追踪专家控制系统,目的是控制双馈电机输出的有功功率来控制电机的电磁转矩,从而间接的控制机组转速。
1 风力发电机组的专家控制系统
专家控制系统是新兴的一门学科,它是以知识为基础,把人工智能领域的专家系统技术与控制理论方法相结合,进行灵活的控制并实现复杂问题的控制。作为交叉学科的人工智能和控制理论来说,既可以典型应用于人工智能领域,又是智能控制理论的分支,专家控制涉及低层控制和高层控制两个方面。
人工智能领域中发展起来的专家系统是一种在特定领域内基于知识的、具有专家智能水平的计算机程序。它通过模拟专家的思维过程,利用人类专家知识和解决问题的经验方法来处理专家领域的难题。对于知识的控制系统,它的核心控制器是体现知识推理的机制和结构。在不同的控制要求的情况下,专家控制系统的结构不一样,但是专家控制系统一般都包含知识库、推理机、控制规则集和控制算法等。图1 为专家控制系统的基本结构[5]。

图1 专家控制系统的基本结构
2 模糊专家控制系统最大风能追踪设计
基于模糊技术的模糊专家系统模型是建立在模糊数学基础上的,这样产生了基于模糊规则的专家控制系统,也叫做模糊专家控制系统。模糊专家系统采用隶属度和模糊集合来表示信息,并利用模糊技术推理的方法来对获得的信息进一步推理。模糊专家控制可以对得到的信息进行全部或部分的利用模糊技术来获取知识、表示知识并运用。它的核心是模糊推理机,可以根据模糊知识库中的不确定性进行推理、策略、解决系统问题,并给出认为合理的控制命令。此控制方法可应用于模型不太充分、不太精确,甚至不存在的复杂对象[6]。下面以风力发电机组为例进行。
风轮的运动方程:

发电机的运动方程:

式中:Jr为风轮转矩的转动惯量;Jm为发电机转子的转动惯量;Tr为风轮的气动转矩;Tm为高速轴的机械转矩;Tg为发电机的反转矩;ωr为风轮转速;ωg为发电机转速;n 为齿轮箱的传动比;Dr为风轮部分的传动阻尼系数;Dg为发电机部分的传动阻尼系数。
发电机反转矩公式:

式中:Tg为发电机的反转矩;p 为发电机极对数;m1为发电机定子相数;U1为电网电压;C1为修正系数;ωG为发电机的当量转速;ωl为发电机的同步转速;r1、x1为定子绕组的电阻和漏抗;r′2、x′2分别为归算后转子绕组的电阻和漏抗。
部分参数如下[7]:齿轮传动比为1∶ 90,风轮转动惯量为5.45 × 106kg ·m2,发电机转动惯量为97. 5 kg·m2,定子电阻为0. 002 25 Ω,定子漏抗为0.015 9 Ω,转子电阻(折合)为0.002 03 Ω,转子漏抗(折合)为0.020 7 Ω。
本文的最终目标就是捕获最大风能,提高风力发电机组的效率。其中,对发电机转矩的控制是最关键的。由于风力发电机组具有时间性、非线性、滞后性等特点,用经典的控制理论很难实现,解决这种不太充分、精确的模型,以至于无法建立控制过程而提出的专家控制系统可以解决这类问题。
2.1 最大风能追踪专家控制器的结构
根据风力发电系统最大风能追踪的特点,构建如图2 所示的最大风能控制系统。
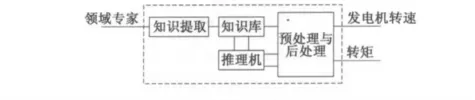
图2 模糊专家控制框图
系统工作过程如下:首先用数据挖掘系统得到一些最大风能追踪的有用数据,根据模糊控制系统的需求进行编制,存入到系统的知识库里,然后系统根据用户预先设定的状态实时获取当前的发电机转速,并将其与预先设定好的参数相比较,得到与之相应的误差和误差变化率。根据以上所述,系统先对参数进行模糊化处理;然后推理机再按照某种规则根据这些数据推理出一种最合理的结果;最后用推理结果去模糊化后转换成相应的可控制结论,系统再根据结论具体控制发电机的转矩。
2.2 模糊专家库的设计
2.2.1 知识库的表示方法[8]
专家控制系统是基于知识的系统,模糊专家控制系统也是基于知识的。所以,专家系统开发过程中关键的一个环节是知识获取。
本系统中,知识库的表现形式为产生规则的基础上增加了模糊表示的能力,其一般表示形式:

式中:P1,P2,…,Pn是规则的子前提条件,即风能捕获中的模糊性征兆(事实);ωP1,ωP2,…,ωPn是前提子条件的权重系数,表示前提子条件中各事实对捕获贡献大小的度量;C1,C2,…,Cn是规则的可信度;τ 是规则成立的阈值,其取值由专家规则决定,通常介于0 和1 之间。
2.2.2 输入、输出变量的论域[9-11]
模糊专家控制器输入为发电机转速,输出为转矩。系统的输入量和输出量首先进行规则化处理,再把它们的基本论域和统一的模糊集合论域相对应。
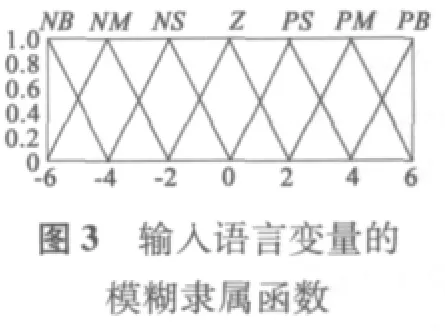
本文将输入输出变量的模糊语言状态值设为7个:分别是负小(NS)、负中(NM)、负大(NB)、零(Z)、正大(PB)、正中(PM)、正小(PS),论域为{6,5,4,3,2,1,0,-1,-2,-3,-4,-5,-6}。
根据上述控制规律建立控制规则,总结出最大风能追踪系统的控制经验,得出模糊控制规则表,如表1 所示。

表1 模糊专家控制规则表
2.2.3 模糊隶属度函数[12]
以风速为基准,15 m/s 以上风速视为大风(PB),5 m 以下风速视为小风(NB),10 m/s 左右风速视为中风(Z),大风与中风之间12m/s 的风速定义为正中(PM),中风与小风之间8 m/s 的风速定义为负中(NM)。
模糊语言值实际是一个模糊子集,而语言值最终是通过隶属函数来描述的。在模糊规则中确定隶属度值是重要的过程,模糊理论中采用“0”和“1”之间的一个数值来描述某元素以某种程度隶属于某集合。只要选择适当的隶属函数,模糊推理算法,逻辑模糊系统可以在任意精度上逼近某个给定的非线性函数[13]。
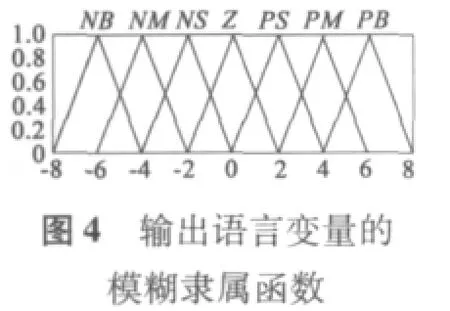
根据该系统的特点,输入输出隶属函数采用三角模糊专家隶属度的形式。本文设计的隶属度函数如图3、图4 所示[16,19]。
2.2.4 模糊专家系统的推理模型[14]
专家系统中实现基于知识推理的部件是推理机,它是基于知识的推理在主机中的实现,是专家系统的核心部分,用来控制、协调整个系统。
以1 MW 风力发电机为研究对象,设风电机组在发电运行时,发电机转速集合量X = {x1,x2,…,xn},转矩集合Y ={y1,y2,…,yn}。X 与Y 之间的模糊关系隶属度表示为:

式中:R 为专家知识的模糊关系矩阵,R = (rij)m×n,rij∈(0,1],rij越大,关系越密切;“○”为模糊算子。
首先将1 MW 风力发电机转速与知识库中规则前件的隶属度值进行匹配,确定知识库中哪些规则可用,然后用模糊关系矩阵表示转速和转矩间的关系,当知识库中所有规则匹配完成后将所有可用规则前件的权重系数组成模糊矩阵R,矩阵中的每个元素的大小表明它们相互间的关系程度。

由此模糊隶属关系可表示:

式中:∧、∨分别表示最大值和最小值运算。
经过模糊运算,系统对这个结果进行处理,以便得到转矩输出量。这种方法方便直接,但主要应用在隶属值之间差距较大的情况。
3 系统仿真与分析
以1 MW 风电机组为控制对象,在各种工况下对模糊专家控制系统进行仿真。风速随时间变化的曲线如图5 所示。电磁转矩随时间变化的图线如图6 所示。风力发电机功率输出如图7 所示。
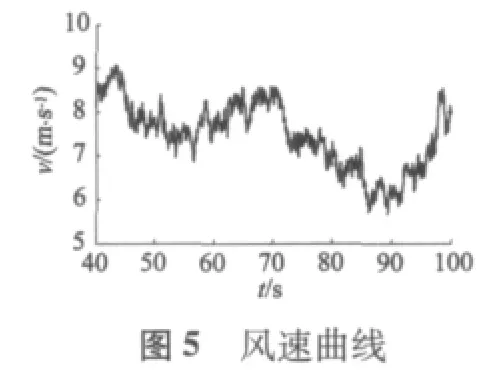

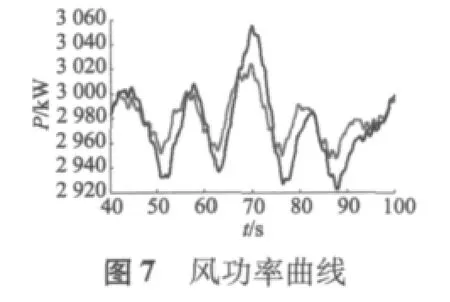
由于智能控制领域中的模糊控制是一个高度非线性的动力系统,它可以不依赖于数学模型,具有很强的自适应和学习能力,而专家系统的智能化主要表现为能够在特定的领域内模仿人类专家思维来求解复杂问题。根据几组曲线图可以看出,模糊专家控制方法在风电机组中能比较好地完成控制任务,实现风能的最大追踪。
4 结 语
本文针对风电机组的非线性和时变性,将模糊控制和专家系统相结合,提出了一种基于模糊专家控制系统的最大风能追踪控制策略,目的是为了充分利用专家知识和人工经验,克服了风电机组输出功率的不稳定性,最大限度地利用风能以获得最大输出功率。将两者有机的结合起来,通过仿真结果可以看出,采用模糊专家控制器可以有效地追踪最大风能,比传统控制方法要优越很多,该方案具有可行性。
[1] 陈毅东,杨育林,王立乔,等.风力发电最大功率点跟踪技术及仿真分析[J].高电压技术,2010,36(5):1322-1326.
[2] 宋乐鹏,李辉,董志明.模糊逻辑的双馈发电机最大风能捕获控制[J].微特电机,2010(10):55-60.
[3] 张琦玮,蔡旭.最大风能捕获风力发电系统及其仿真[J].电机与控制应用,2007,34(5):45-46.
[4] Morimoto Shigeo,Nakamura Tomohiko,Takeda Yoji.Power maximization control of variable speed wind generation system using permanent magnet synchronous generator[J].Electrical engineering in Japan,2005,150(2):11-19.
[5] 刘建伟,徐兴元,庞京玉,等.专家控制系统研究进展[J].微型机与应用,2005(11):4-5.
[6] Neammanee Bunlu,Krajangpan Korawit,Sirisumrannuk Sam.Maximum peak power tracking based control algorithms with stall regulation for optimal wind enegy capture[J].IEEE Transacions on Industry Application,2008,128(4):411-417.
[7] 苏宪彬.变速恒频双馈风电系统最大风能追踪研究[D].沈阳:沈阳工业大学,2010.
[8] 吴钊.一种专家系统模糊知识库的设计与实现[J].襄樊学院学报,2003,24(5):68-69.
[9] 杨晓红,葛海涛.基于模糊控制的风力发电机组低风速时最大风能追踪控制仿真研究[J].机械设计与制造,2010,8(8):207-209.
[10] 王欣,王魏.基于神经元网络和模糊专家系统的电短期负荷预测[J].沈阳工程学院学报(自然科学版),2010,6(4):318-319.
[11] 刘峰,王辉,许琤,等.模糊控制器在最优风能捕捉系统中的应用[J].微计算机信息(测控自动化),2008,24(22):18 -19.
[12] 朱成银.模糊专家控制系统及其在闸群自动控制系统中的应用研究[D].四川大学,2004:45-47.
[13] 刘晓慧,马玲.模糊理论在专家系统中的应用研究[J].电脑学习,2009(6):9-10.
[14] 张晓丹,赵海,王刚,等.基于信息融合的故障诊断模糊专家系统的应用[J].吉林大学学报(工学版),2004,1(34):141 -145.
猜你喜欢
小火炬·智漫悦读(2023年3期)2023-05-29 02:00:09
中学生数理化·八年级物理人教版(2023年6期)2023-05-25 11:59:36
小天使·五年级语数英综合(2021年9期)2021-09-18 20:59:12
制造技术与机床(2019年6期)2019-06-25 10:17:46
家教世界·创新阅读(2017年1期)2017-02-07 23:35:42
山东工业技术(2016年15期)2016-12-01 05:31:27
中国交通信息化(2016年9期)2016-06-06 07:42:23
文理导航·科普童话(2016年3期)2016-04-26 16:45:42
图书馆研究(2015年5期)2015-12-07 04:05:48
少年科学(2014年2期)2014-02-24 07:23:56
