
智能结构振动主动控制实验研究
2012-11-14 11:05丁高林郑桂隆
电子测试 2012年3期
丁高林,郑 宾,于 博,郑桂隆
(中北大学仪器科学与动态测试教育部重点实验室, 山西太原 030051)
0 引言
智能结构是指在基本结构中使用压电材料作为传感和驱动元件的新型结构,具有集传感和驱动于一体的优越特性。本设计中智能结构振动主动控制系统主要由以下几部分组成:结构材料,传感器压电陶瓷PZT,驱动器压电聚合物PVDF和控制系统。
1 实验模型及实验系统建立

图1 智能梁结构图
根据压电智能梁的力学模型及传感/驱动器位置优化理论,采用压电陶瓷PZT-5作为驱动器分别与1 mm、2 mm厚的钢等截面梁形成智能单元,采用应变片作为传感器,建立智能梁振动主动控制实验模型,如图1所示。
2 系统组成及工作原理
整个压电智能结构振动主动控制系统的组成如图2所示。其基本工作原理如下:振动控制对象结构上按一定规则粘贴或者嵌入有一定数量的压电片,其中一部分作为传感器。控制对象振动时,压电片等将各被测点的振动信号转换成电荷信号,电荷放大器则将电荷信号转换为反映振动大小的电压信号,经信号调理后,进入多路A/D转换器,转换成适于DSP处理的数字信号,DSP根据相应的控制方法进行快速处理,得到的控制信号经D/A转换器转换为模拟电压信号,经滤波及功率放大器后驱动压电片进结构的振动主动控制,经A/D采样的数据通过TMS320F2812 CAN模块与上位机进行通信对采集的数据进行实时显示。

图2 振动主动控制系统的组成
3 控制系统
在图2虚线框所示的基于DSP的控制单元中,选用了TI公司的高性能32位数字信号处理器TMS320F2812,其内部时钟最高达150 MHz时,指令周期仅为6.67 ns,其片上还集成有多路A/D模块。这些都为实现复杂的振动控制算法提供了良好的条件。作为驱动部分的D/A模块则采用BURR—BROWN公司的DAC7724。在TMS320F2812与DAC7724之间,则采用一片ALTERA公司的EPM240T100C5N芯片来作为两者之间控制信号的口。
3.1 控制系统的硬件设计
控制系统传感部分中所采用的电荷放大器的输出电压信号经信号调理电路处理后,得到符合TMS320F2812的A/D输入要求的0~3 V间的电压信号。
TMS320F2812片内的A/D模块包括12位ADC核,内置双采样保持器,16个通道。在实际应用中,为提高A/D转换的精度,在电路板制作时,A/D模块应尽量远离数字电路,以避免数字脉冲干扰。为了获得精确的采样数据对同一通道进行多次采样,从而实现模拟信号的过采样,在过采样模式下可以有效的提高转换的精度。
控制系统驱动部分所采用的D/A模块是DAC7724。其为4通道。12位分辨率10V信号量程,建立时间10 μs,15 V供电的低功耗D/A转换器。它内部有2级锁存。先将数据锁存到缓冲器中,然后再锁存到输出寄存器,实现多通道同时输出。
控制系统驱动部分电路图见图2,TMS320F2812通过CPLD来实现对DAC7724输出的控制。DAC7724接入CPLD作为被控制信号的有4个引脚:A1,AO,CS,LDAC。A1,AO主要用于区分4个D/A通道,对应关系如下A1A0=00:通道A;A1A0=01:通道B;A1A0=10:通道C;A1A0=11:通道D。CS是片选信号,LDAC是加载DAC输入数据,均为低电平有效。
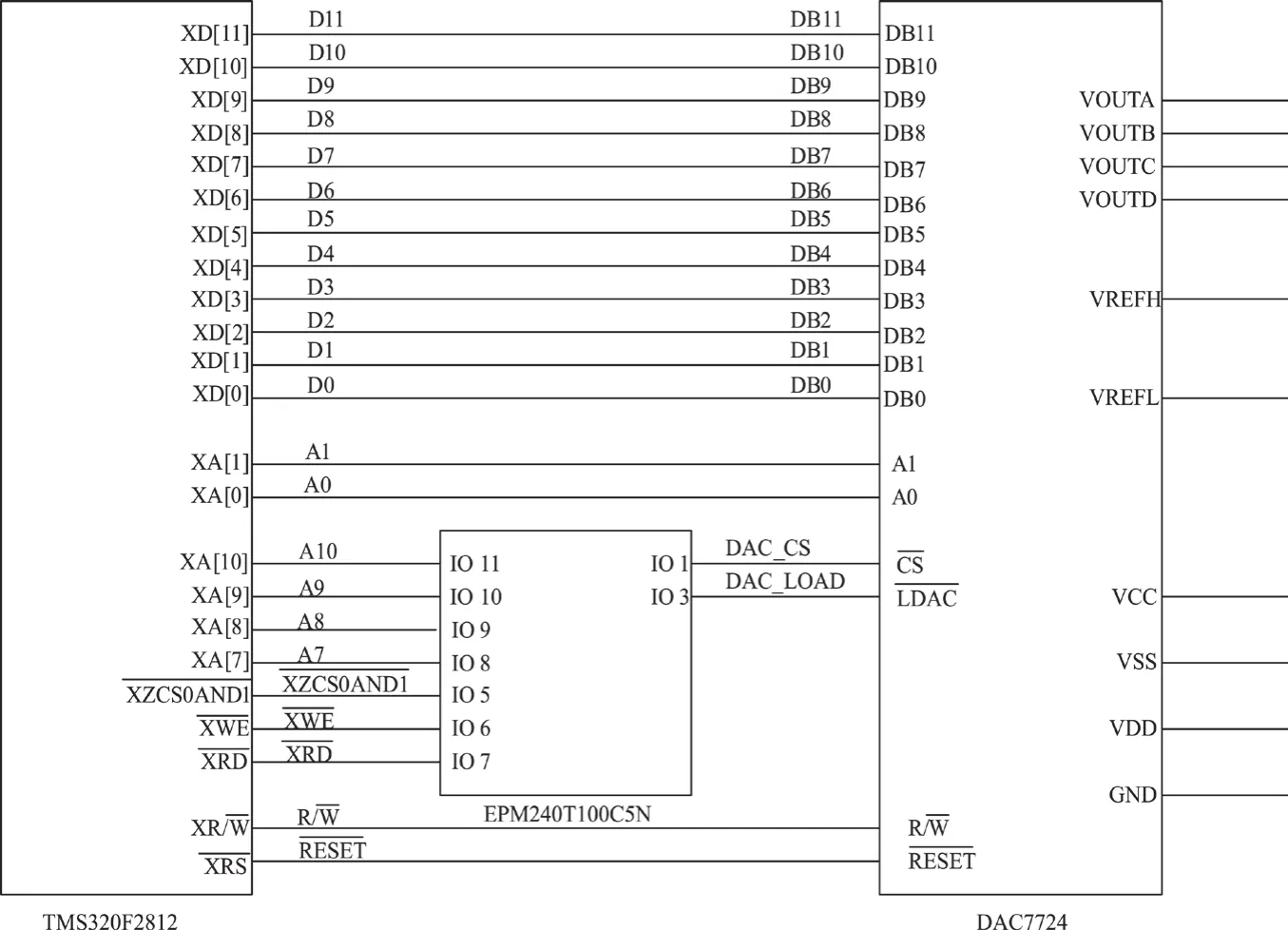
图3 控制系统驱动部分电路
如图3所示TMS320F2812的12根数据线D0-D11与DAC7724的12根数据线直接相连,2根地址线A0、A1与DAC7724的A0、A1,低地址线A0、A1编码来选择DAC7724的4个输出通道。根据TMS320F2812的存储器映像,XZCX0AND1(低电平有效)对应着外部存储器0x002000-0x005FFF 16K×16的存储区内,通过对A7、A8、A9、A10这四根地址线的译码可将DAC7724的四个输出通道映射到0x005500-0x005503地址处,由于EPM240T100C5N芯片可以通过VHDL语言编程来选择译码功能,在TMS320F2812向外寻址0x005500-0x005503时,使得DAC7724的片选信号CS(低电平有效)使能,同时使能DAC7724的LDAC(低电平有效)来控制加载数据的输出。
3.2 系统的软件设计
控制系统的软件程序流程图如图4所示。 首先程序先进行初始化工作,关中断,配置中断矢量表,初始化A/D模块,配置D/A通道地址,初始化CAN模块与上位机通信。本设计中采用Q格式,Q格式处理方法是为了提高DSP的运算速度,500 kHz采样频率,及时DAC发送,同时采样数据通过CAN通讯送往上位机进行实时显示。
A/D中断服务子程序,主要是对A/D采样的数据进行算法处理后运算得到结果送往DAC通道对被控对象进行控制。并且通过CAN总线把采集到的数据送到上位机进行实时显示,起到良好的监控作用。
子程序代码如下:
interrupt void ad(void)
{
PieCtrl.PIEACK.all = 2;
Ad_data0= AdcRegs.RESULT0;
if(tongdao >= 0)
{
if(tongdao <= 3) /* 通道范围 */
{
tongdao_flag[0]= 1; /* 通道标志 */
// xishu = Ad_data*2048/10+2048;//0.003ms 处 理一个点//538
xishu2=Ad_data0*2048;
xishu3=_IQ21mpyI32(xishu1,xishu2);
xishu=_IQ21int(xishu3)+2048;
*DA_PORT0 = xishu;
// da_run();
*DA_OUT = 0;
}
}
}
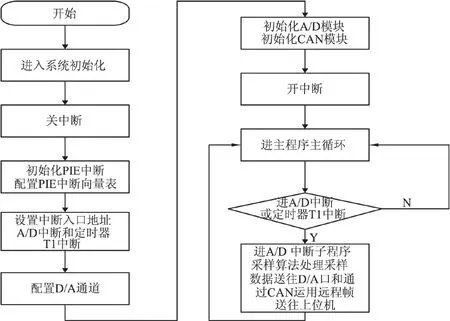
图4 控制系统软件主程序流程图
4 系统模型硬件电路搭建与仿真
为了验证系统方案可行性,需要搭建硬件电路进行验证,准备设备有信号发生器、两通道以上的示波器、2812开发板、SEED-510PLUS仿真器、±15 V电源、导线若干。硬件电路搭好后,信号发生器输出信号设置1 kHz、Vp-p(1V)、偏移(0.5 V)的正弦波信号,这样信号的电压值在(0~1 V)之间变化符合2812的A/D电压输入范围,信号发生器与2812的一路A/D相连后也要连上示波器一边观察波形,2812的一路D/A连接另一路示波器通道,待各设备通电后,运行2812的程序可以观察示波器两路波形,如图5所示。

图5 两路信号波形
如图5所示结果A/D采集的数据对应示波器2号通道蓝色波形,D/A输出通道对应示波器3号通道红色波形,通过两路波形的比较可以看出A/D采集的数据通过算法处理后可以及时通过D/A发出去,且失真小,达到了我们所期望的良好的实时数据采集、观测与控制的作用。
[1]孙丽明.TMS320F2812原理及其C语言程序开发[M].北京:清华大学出版社,2008.
[2]谭浩强.C程序设计[M].2版.北京:清华大学出版社,1999.
[3]王海荣,徐志伟.用于振动主动控制的DSP系统设计与实现[J].微计算机信息,2008(28).
[4]苏奎峰,吕强,常天庆,张永秀.TMS320X281xDSP原理及C程序开发[M].北京:北京航空航天大学出版社,2008.
[5]顾卫钢.手把手教你学DSP——基于TMS320X281x[M].北京:北京航空航天大学出版社,2011.
[6]王小华,陈庆伟,胡维礼.悬臂梁的振动抑制研究[J].南京理工大学学报,2002(26):17-22.
[7]林娜.压电智能结构用于振动主动控制技术的研究[D].西安:西北工业大学,2006:25-30.
[8]习博,方彦军.基于ARM的嵌入式电能在线监测装置的设计[J].仪表技术与传感器,2007(2):47-49.
猜你喜欢
压电与声光(2019年1期)2019-02-22
汽车维修技师(2018年7期)2018-12-07
铜仁学院学报(2018年6期)2018-07-05
电子制作(2017年13期)2017-12-15
电子制作(2017年20期)2017-04-26
电子技术与软件工程(2017年2期)2017-03-15
现代电子技术(2016年15期)2016-12-01
核技术(2016年3期)2016-04-19
振动、测试与诊断(2014年6期)2014-03-01
振动、测试与诊断(2014年6期)2014-03-01
