基于ARM+CPLD的高精度超声波风速仪的设计*
2012-10-22 01:06:48吴宗玲闫连山曾德兵陈娟子
传感器与微系统 2012年6期
吴宗玲,闫连山,曾德兵,陈娟子
(西南交通大学信息光子与通信研究中心,四川成都 610031)
0 引言
1 超声波风速风向测量原理[3,4]
在自然环境中,风速、风向可能是随机变化的,为了能够准确地测量风矢量信息,本文采取将两对收发一体的超声波探头相互垂直放置,两两相对呈180°且每对超声波探头间距离相等,安装在同一水平面上,分别表示东、南、西、北(如图1(a),(b)所示)。以相同频率发射超声波信号并测量其顺、逆向的传播时间。通过相应计算,可以得到风速、风向的数值,其所测得的结果为平均的水平风速、风向,在对应的坐标上表示,如图1(c)所示。
假设南北(东西)两对超声波收发器间的距离均为L,超声波顺、逆传播时间为t南北,t北南,t东西,t西东。其中,t西东为超声波由西到东、t东西为由东到西、t南北为由南到北、t北南为由北到南传播所需时间,风速为VW,东西分量为V东西,南北分量为V南北,超声波传播速度为VS。根据时差法可求得
东西方向上风速为

图1 超声波风速风向仪的结构与原理Fig 1 Structure and principle of ultrasonic wave anemometer

南北方向上风速为


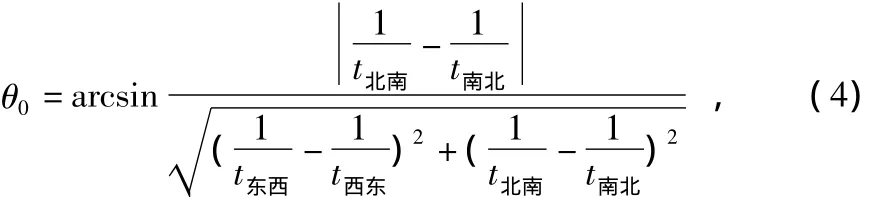
于是,风向角
认识是第一位的,只有提升事业单位人员的整体素养,提升他们对人事档案管理的充分认识,才能真实记录和完整反馈事业单位各项人事关系,真正为事业单位发展提供决策依据。
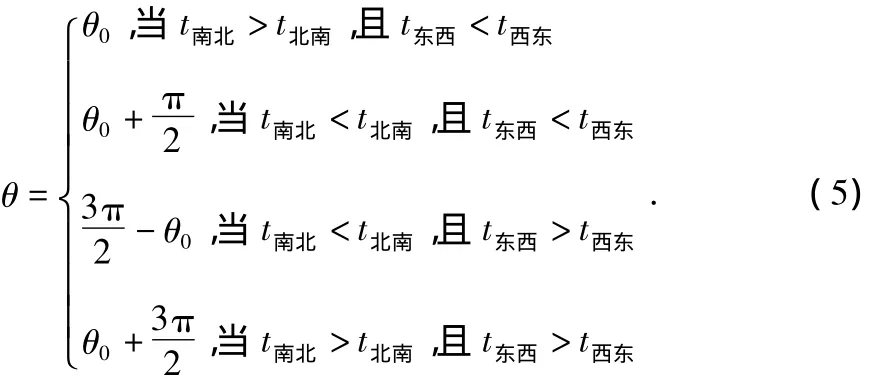
根据式(3)和式(5)可得出以下结论:
1)只须测得超声波顺、逆传播时间t南北,t北南,t东西,t西东便可以求得当前被测风速和风向,且与超声波传播速度VS无关,而超声波的传播速度主要受温度影响,所以,本设计也基本消除了环境温度对测量结果的影响[5];
2)由于对超声波传播时间的测量精度将直接影响到系统最终的性能,假设两对超声波传感器间的距离L=15 cm,VS=340m/s,则传播时间t=0.44ms,因此,要求系统具有较快的测量速度和计算精度,本文采用ARM+CPLD的方法,其中,超声波传播时间测量单元的时钟为100 MHz,完全可以达到设计要求,并结合ARM强大的运算处理能力,以满足测量速度快、计算精度高的要求。
2 超声波风速风向测量系统设计
2.1 系统总体设计
采用NXP公司的ARM和Altera公司的CPLD芯片作为核心处理器,控制超声波传感器驱动电路、超声波信号放大和接收电路、系统计时电路、运算处理电路和外设接口电路,具体结构框图如图2所示。

图2 系统整体设计框图Fig 2 Block diagram of the overall system design
超声波驱动单元接收中央处理器的命令,产生驱动超声波探头的脉冲,并驱动超声波探头发射超声波;时间测量单元与超声波发射和接收电路相连,用于测量超声波从发射到接收所传播的时间;运算处理单元用于进行数据的采集、处理,并发出各种控制命令;通信接口单元给用户终端提供相应的数字接口,进行数据通信;电源单元将输入电源转换成系统各部分所需要的电压。
2.2 功能单元实现
2.2.1 超声波驱动电路
首先,将由中央控制器发出命令,使得CPLD单元产生10个频率为300kHz的方波脉冲,这10个脉冲经过相应的升压电路,将脉冲的峰峰值升到600 V左右以较好地驱动超声波传感器。图3为驱动电路脉冲的实际测量波形示意图。

图3 超声波驱动脉冲Fig 3 Pulse which drives ultrasonic wave sensor
2.2.2 超声波接收和放大电路、计时单元
超声波探头所接收到的信号是非常微弱的,必须要进行相应的放大才能正确地判决其到达时间,首先将接收信号通过运放进行足够的放大,再送入施密特触发器将其变成可被CPLD识别的数字信号,最后通过CPLD将其到达时间测量出来。如图4所示(发射信号是10个驱动脉冲;接收信号是经过施密特触发器后的判决信号)。

图4 超声波接收信号Fig 4 Measured receiving signals of ultrasonic wave
2.2.3 数据采集、处理单元
基于NXP公司的ARM芯片具有较高的数据处理能力、控制驱动能力、功能强大的电路接口设计能力,本文采用其来进行相应的控制和数据处理。首先,将CPLD测量的超声波传播时间t南北,t北南,t东西,t西东发送到 ARM 芯片,然后,运用式(3)、式(5)分别计算出风速和风向的相关数据,这样就完成了一次风速风向的测量。
3 风速风向数据处理
将若干次单独测量的结果进行相应的平均、滤波处理,从而得到最终的测量数据。一种较好且有效的处理方法是中位值平均法[6],即去掉最大和最小的几个数再平均,这样所测得的数据更加符合实际情况。
然而,在进行角度平均的时候会遇到这样的问题:假设正北方向为0°(360°),那么由于风向的不稳定性,在测量正北方向附近时可能测出来的风向结果是2°也可能是358°等,这样如果直接平均处理的话就会出现严重的错误。本文所提出的方法是:先将要平均的风向角(N组)进行排序,再将排序后的数据,取最大值与最小值之差,如果其大于300°,则将最小值加上360°,并重新进行排序,这样反复查找直到全部都满足要求。最后将所得的数据再进行中位值平均处理,若其最终结果大于360°,则减去360°即可,这样就完全解决了因为临界角0°(360°)而带来的角度测量不准问题。
4 气压数据对风速的修正[7]
在某些应用场合,比如:风力发电、风能监测等,需要测量出其绝对风速(风能的大小),这不仅和相对风速有关,而且还与空气密度有密切关系。而空气密度可以用气压来衡量,所以,本文采用了气压传感器来测量当前大气气压,并将其测量结果对超声波风速仪所测得的相对风速值进行修正,以得到绝对风速数据。本文所采用的气压芯片是BMP085,其测量范围可以达到300~1 100 hPa,测量精度可以达到0.01 hPa,在一定程度上保证了系统测量结果的准确性。
5 系统实验
利用一个小型风洞对所设计的系统进行标定,用一台电机向风洞中吹风,通过调节控制电机的变频器从而得到不同的风速值,本系统采用的是300 kHz的超声波传感器,实验环境温度为24.7℃,相对湿度72%RH,大气压力948.4 hPa。共取值11组不同风速的测试点,每组数据包含18个测量值,并将测量数据经过最小二乘法拟合以观察其线性度,如图5所示。受风洞条件所限,对于风速高于25 m/s的情况,没有进行测试。

图5 系统风速标定结果Fig 5 Result of wind speed calibration of the system
6 结束语
本文研究设计了基于ARM+CPLD的超声波风速风向仪,给出了风速风向的理论模型和计算方法,验证了一种解决在测量临界角0°(360°)时所带来角度误差问题的算法,并提出了一种测量绝对风速值的理论模型和具体实现,对风能监测与风力发电有重要的参考意义。与传统的风速风向测量系统相比其具有以下优点:
1)本系统采用的是收发一体式超声波传感器,基本消除环境温度对测量结果的影响,且具有测量精度高、速度快、启动风速为零、抗腐蚀等优点;
2)本系统采用ARM+CPLD为主控芯片,系统更为灵活、完备,功能更为强大,因此,本系统不仅检测速度快、准确度高,而且还具有广阔的升级空间;
3)本测量系统无机械转动部件,不存在磨损而带来的老化、损坏问题,在一定程度上提高了系统的可靠性和准确性;
4)提出了一种测量绝对风速的理论模型,可以更为精确地反映风速风向物理意义。
[1] 陈 梅,洪 飞,李 鑫,等.风速风向传感器在风机控制中的应用与研究[J].自动化技术与应用,2008,27(4):38 -41.
[2] 程 刚,林向真.超声波风速仪[J].应用声学,1982,1(2):28-30.
[3] 曹长宏,蒋立辉.高精度超声波测风仪的设计[J].传感器与微系统,2010,29(2):87 -89.
[4] 罗中兴,魏毅立,施静伟.基于DSP的超声波测风仪[J].声学与电子工程,2009(2):39-41.
[5] 唐慧强,黄惟一,李 萍,等.基于 DSP的超声波风速测量[J].东南大学学报,2005,21(1):21 -23.
[6] 朱土明,刘镇清,魏墨庵,等.提高测量声时精度的过零检测数字平均法[J].声学技术,1990,9(3):36 -39.
[7] 吴永忠,韩 雪,王世峰,等.以空气密度修正风力发电机组上网发电量方法的分析[J].可再生能源,2008,26(6):79-81.
猜你喜欢
电机与控制应用(2021年12期)2021-02-28 07:55:52
海洋通报(2020年5期)2021-01-14 09:26:54
电子制作(2018年17期)2018-09-28 01:56:38
小资CHIC!ELEGANCE(2016年26期)2016-12-13 20:06:51
军事文摘·科学少年(2016年7期)2016-09-20 16:49:54
西南交通大学学报(2016年4期)2016-06-15 20:29:37
电子制作(2016年21期)2016-05-17 03:52:47
水利科技与经济(2016年4期)2016-04-22 03:49:32
知识经济·中国直销(2016年3期)2016-02-27 16:15:34
电网与清洁能源(2015年3期)2015-02-28 16:03:31