多路水声信号抗串漏检测技术仿真
2012-10-20 06:58:42杜召平刘百峰
舰船科学技术 2012年12期
杜召平,张 强,刘百峰
(1.91388部队,广东湛江524022;2.92854部队,广东 湛江524022)
0 引言
水下多目标定位系统用来精确跟踪定位加装合作声信标的多个水下目标的运动轨迹。每个合作声信标的发射信号为正弦填充CW信号,每个同步周期有2个脉冲信号(测距、测深脉冲信号),双脉冲间隔在30~70 ms之间。系统在对多路水声信号进行检测和处理时,其水声信道输入为多个CW窄脉冲信号、高斯白噪声和鱼雷寻的噪声。CW窄脉冲信号含有丰富的频谱,在多频率多通道信号处理系统中,强信号的边带频谱将通过邻近频率通道,成为邻近通道中的尖脉冲干扰,形成“通道串漏”,容易造成检测时产生大量的虚警。为有效克服多路水声信号通道串漏和高斯白噪声、鱼雷寻的噪声对信号检测的影响,本文系统采用FIR宽带滤波器、Notch滤波器组和瞬时频率方差序列等技术,对接收到的水声信号进行检测和处理。
1 系统多路水声信号检测处理仿真模型
1.1 系统水声信号处理流程
系统水听器接收多个CW窄脉冲信号、高斯白噪声和鱼雷寻的噪声,经FIR宽带滤波器一级前端滤波后,送Notch滤波器组实现信号的二次滤波,最后利用每个Notch滤波器的权值实时计算瞬时频率方差序列,经联合检测判决后,输出检测判决结果。
1.2 系统多路水声信号检测处理模型
根据系统水声通道组成,建立系统多路水声信号检测处理仿真模型综合框图,如图1所示。
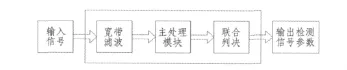
图1 系统多路合作水声信号处理仿真模型综合框图Fig.1 Integrated block diagram for the system simulated model to process multi-path cooperative underwater acoustic signals
其中,输入信号为多个CW脉冲信号、高斯白噪声和鱼雷寻的噪声。CW信号的填充频率为n路规定的信号频率之一,每个CW脉冲的脉宽固定,各路CW脉冲之间的间距和脉冲幅度可以设定,信号同步周期为1s,系统采样频率120 kHz。
宽带滤波对接收信号进行预处理。由于接收信号中可能包含填充频率为n个规定频率中的1个或多个(也包括没有信号),宽带滤波通带必须涵盖n个可能的频率。仿真中取通带为8~32 kHz。考虑到实际系统中为硬件滤波器,并且要保证线性相位,我们取阶数为40阶的FIR滤波器。
主处理模块是系统对多路水声信号检测处理的核心,由n路并联的Notch滤波器组和瞬时频率方差解算模块组成。主处理模块如图2所示。
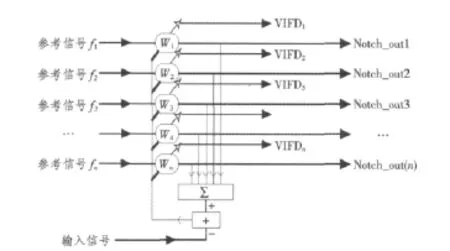
图2 主处理模块框图Fig.2 Block diagram for the main processing module
综上所述,建立系统多路水声信号抗串漏检测处理仿真模型,模型由输入信号、宽带滤波、主处理模块和检测判决模块组成。其中输入信号和宽带滤波部分为模型的辅助部分,采用理想的信号源和宽带滤波器。主处理模块和联合判决模块部分是水声信号检测处理的核心,采用Notch滤波器组、瞬时频率方差序列实现对多路水声信号的抗串漏检测处理。
2 系统水声信号抗串漏检测仿真及结果分析
为精确预测和评估系统水声通道的功能和质量,分别对系统水声通道的抗串漏能力、1 ms和2.5 ms脉宽多通道检测能力、鱼雷寻的信号对检测的影响程度进行仿真和分析。仿真工具为Math Works-Matlab Program。
2.1 系统水声通道抗串漏检测能力仿真
设n路规定频率的CW信号有5路都存在,其中1个为强信号,其他为弱信号 (信噪比相差60 dB),5路规定频率的CW信号出现在不同时刻,各为相差40 ms的双脉冲。系统水声通道抗串漏能力仿真结果显示,由于第3路的信号非常强,串漏到了其他4路,在信号的上升沿和下降沿各会产生1个串漏信号,于是就出现了大量的虚警。但从VIFD检测器的输出 (输入为Notch滤波器输出)来看,虽然强信号在其他路有很强的串漏,但串漏过来的是信号的旁瓣,瞬时频率的方差较大,而本路信号的方差较小。取频率方差的倒数输出,串漏被很好地消除掉。
仿真表明,系统水声通道具有很好的多路水声信号抗串漏检测能力。
2.2 系统窄脉冲多通道检测能力仿真
2.2.1 系统1 ms窄脉冲信号多通道检测能力仿真
设输入信号为5路规定频率的CW信号,信号出现在不同时刻,各为相差40 ms的双脉冲,脉宽1 ms,信噪比为0 dB,输入信号湮没在噪声中。应用Notch滤波器和VIFD技术很难检测1 ms脉宽、信噪比为0 dB的输入信号,从仿真结果来看,当信噪比为3 dB时,系统对信号具有较好的检测能力。通过对比可知,随着信噪比的增大,系统对多路信号的检测能力趋于理想。
2.2.2 系统2.5 ms脉冲信号多通道检测能力仿真
设输入信号为5路规定频率的CW信号,信号出现在不同时刻,各为相差40 ms的双脉冲,脉宽2.5 ms,信噪比为0 dB,输入信号湮没在噪声中。对比系统脉宽为1 ms、2.5 ms输入信号的检测处理仿真结果可知,在低信噪比条件下,1 ms脉宽由于积分时间较短,噪声没有被较好地平均,有较大起伏,造成了大量虚警;另外,由于噪声包络的宽度为波器带宽的倒数,1 ms脉宽和噪声的包络宽度相近,使判宽对剔除虚警的作用不大。而当输入信号脉宽为2.5 ms时,由于积分时间较长,噪声可以被很好地平均,大大减少了虚警;另外,由于输入信号脉宽增大,使得判宽的门限大于噪声包络的宽度,判宽可以有效剔除虚警;随着输入信号脉宽的增大,信号的旁瓣对临近信号通道的干扰减小,也导致系统对信号的检测能力增强。
根据上述仿真分析结果,建议在条件允许的情况下,适当增大输入信号的信噪比和脉宽,这样可以大大增强系统对信号的检测能力。
2.3 鱼雷寻的信号对检测的影响程度仿真
水下多目标定位系统对鱼雷进行跟踪时,鱼雷发射寻的信号会干扰系统对信号检测。仿真检验了鱼雷寻的信号对系统信号检测的影响程度。

图3 有鱼雷寻的信号时Notch滤波器输出信号波形Fig.3 Output signal waveform for the Notch filter while there are torpedo homing signals
假设鱼雷寻的信号比Ping信号信噪比高40 dB,仿真结果如图3和图4所示。由图3可知,在Notch输出时,鱼雷寻的信号的上升沿和下降沿各有1个串漏信号。而VIFD检测器可以很好地去掉串漏,实现系统对原有多路合作水声信号的检测。
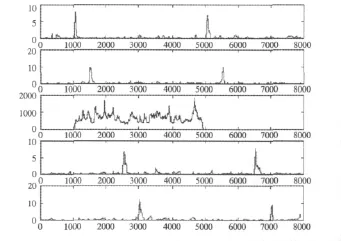
图4 有鱼雷寻的信号时VIFD检测器输出信号波形Fig.4 Output signal waveform for the VIFD detector while there are torpedo homing signals
3 结语
通过对系统多路水声信号抗串漏检测处理仿真研究,可以得到这样的结论:采用FIR宽带滤波器、并联Notch滤波器组和瞬时频率方差序列等水声信号处理技术,能够实现系统对多路合作水声信号的检测。
仿真还表明:在条件允许的情况下,可适当增大目标合作声信号的信噪比和脉宽。这样,可大大增强系统对多路合作水声信号的检测能力。
[1]梁国龙.回波信号瞬时参数序列分析及其应用研究[D].哈尔滨工程大学,1997.
[2]HAYKIN S.自适应滤波器原理[M].北京:电子工业出版社,1998.
[3]维德罗.B.自适应信号处理[M].成都:四川大学出版社,1991.
猜你喜欢
北京航空航天大学学报(2019年9期)2019-10-26 02:30:12
电子制作(2019年11期)2019-07-04 00:34:38
电子制作(2018年16期)2018-09-26 03:26:50
电子测试(2018年11期)2018-06-26 05:56:02
雷达学报(2017年3期)2018-01-19 02:01:27
电子制作(2017年22期)2017-02-02 07:10:34
电子制作(2017年19期)2017-02-02 07:08:28
系统工程与电子技术(2016年7期)2016-08-21 13:59:18
系统工程与电子技术(2016年7期)2016-08-21 13:59:02
火控雷达技术(2016年2期)2016-02-06 02:29:00