
基于LabVIEW的3-UPS-1-PS并联机构控制系统设计
2012-10-16 03:56谢立臣王海博
河北工程大学学报(自然科学版) 2012年4期
谢立臣,王海博,颜 亮
(1河北工程大学机电工程学院,河北邯郸056038;2邯郸市生产力促进中心,河北邯郸,056002)
并联机构具有结构简单、刚度大、精度高、负载能力强、高速性能好、控制简单等特点,并联机构的控制也有很多成熟方案,如液压缸驱动圆柱副、直线电机驱动移动副和旋转电机驱动螺旋副等[1]。结合并联机构优点,国内外已有很多专家将并联机构应用在汽车薄板件柔性可重构夹具中[2]。本文以汽车焊装线上作为薄板件柔性夹具结构基础的3-UPS-1-PS并联机构控制系统为研究对象,研究3-UPS-1-PS并联机构的控制系统的设计及实现。
1 3-UPS-1-PS机构模型及控制原理
1.1 机构模型
3-UPS-1-PS并联机构由动平台、静平台、3个UPS支链(A1B1,A2B2,A3B3)和 1 个 PS约束链(A4B4)组成,见图1。在3个UPS支链上分别装有电机,电机带动UPS支链上的滚珠丝杠,丝杆通过球副连接到动平台,从而实现动平台运动。
根据Kutzbach Grubler公式,空间机构自由度M为

式中:n-空间机构的总构件数;g-空间机构的运动副数;fi-第i个运动副的自由度数;fq-空间机构的局部自由度数。
则本并联机构自由度M为

其中包括:1个移动自由度,3个转动自由度。



1.2 硬件组成
该控制系统由NI公司的PCI-7354运动控制卡、UMI-7774(4轴)多功能数据采集卡和松下小惯量全数字式交流伺服电机MSMD-04-Z-P-1-U和自带的驱动器MBDDT2210组成[3]。系统连接,见图2。
1.3 控制原理
在动、静平台上分别建立动坐标系O'-X'Y'Z'和绝对坐标系O-XYZ,O'O和支链A4B4重合,O'B1作 X'轴,OA1作 X 轴,见图3。
支链AiBi(i=1,2,3)与静平台的夹角为φ。r1为动平台外接圆半径,即动平台上外接圆周上的铰链中心到外接圆圆心的铰链中心的距离,r2为经平台外接圆半径,即静平台上外接圆周上的铰链中心到外接圆圆心的铰链中心距离。令{Ci}为动平台的第i个铰点在O'-X'Y'Z'中的坐标。由于O'点是动点,故{Ci}为相对坐标,{Ai}为静平台的第i个铰点在O-XYZ中的坐标,即绝对坐标;{Bi}为动平台的第i个铰点在O-XYZ中的坐标;[R] 为由O'-X'Y'Z'坐标系到O-XYZ坐标系的旋转矩阵。则

式中:αi-以O为端点,分别过第i个铰点和第i-1个铰点的两条射线组成的夹角度数。

由式(1)得

设动平台绕X、Y、Z轴的旋转角度分别为α、β、γ,则移动参考系变换到固定参考系的旋转矩阵[R] 为

用齐次坐标矩阵来表示动平台的位置姿势矩阵[G] 为

动坐标系O'-X'Y'Z'中的任一点[Q] =[x'y'z'] 中为

{P}={PXPYPZ}为动平台中心O'在固定参考系中的绝对坐标,在机构中{P}={0 0 PZ},由式(2)得

将式(3)写成向量形式:

式中:R(Bi)-铰接点Bi在固定参考系OXYZ中的矢量;R(Ci)-铰接点Bi在固定参考系O'-X'Y'Z'中的矢量;RP-动平台中心O'在固定参考系O-XYZ中的矢量。
对式(4)求导得

式中:V(Bi)-铰链点B在固定参考系OXYZ中运动速度;W-动平台角速度;V-动平台中心O'在固定参考系O-XYZ中的运动速度。
将V(Bi)向Li投影,可得到第i根杆的长度变化速率(输入速度)Li'为

式中:ni-沿第i根杆轴向的单位列向量。即

式中:Vm-动平台运动速度(输出速度)。J-并联机器人的Jacobian矩阵,即速度传递矩阵。

速度传递矩阵表示了支链与动平台的速度映射关系[4-5],通过 LabVIEW 的公式节点功能,将映射方程编辑成模块,在程序中调用。
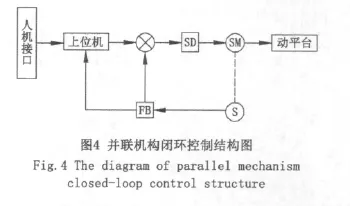
在工作中,并联机构作为薄板件柔性夹具的结构基础,为了适应新车型车身骨架总成组焊,需要调整其动平台位姿,以保证安装在动平台上的板件夹具能够很好的夹紧车身板件。3个电机的单一运动精度和协调运动精度,决定了动平台位姿调整精度。为此,在控制系统中安装反馈装置,形成闭环系统,保证动平台位姿精度,见图4。
2 控制系统软件实现
仪器控制是在仪器和计算机之间发送命令和数据。它需要将仪器与计算机连接起来协同工作,同时还可以根据需要延伸和拓展仪器的功能。完整的仪器控制系统除了包括计算机和仪器外,还必须建立仪器与计算机的通路以及上层应用程序,通路包括总线和针对不同仪器的驱动程序,上层应用程序用于发送命令、仪器的控制面板显示以及数据的采集、处理、分析、显示和存储等[6-7]。
LabVIEW(laboratory virtual instrument engineering workbench)是一种图形化的编程语言和开发环境,是标准的数据采集和仪器控制软件。LabVIEW用于仪器控制开发环境的优点:支持多种仪器驱动和总线,提供丰富的接口,支持OPC、ActiveX、DLL调用和网络通信等。本控制系统程序由虚拟仪器LabVIEW进行编制。其系统构架,见图5。

3 主要功能模块介绍
3.1 指令输出流程
指令输出程序用于向运动控制卡发送控制命令。当伺服系统通电后,程序定时循环。A1B1,A2B2,A3B3支链对应的TF数据由0变1,支链被激活,程序自动寻找对应的子VI运行,进行支链控制。根据需要可以提前在控制参数界面输入运动速度倍率或加速度倍率,用于控制支链运动快慢。同时支链运动还可以在控制界面选择自动运行或者手动运行,见图6。
3.2 限位报警流程
限位报警程序用于接受位置传感器的反馈信号,判断支链是否超程。在A1B1,A2B2,A3B3支链的运动杆件上装有限位器,在运动过程中,如果运动杆件超出规定位置,传感器就会发出反馈信号,TF数据由0变1,报警开关自动打开,报警器开始报警。同时,case结构的数据流通过输出端子,将报警数据进行加法运算依次累加。
机构超出限位,报警器自动报警并且断电停止机构运动。按住操作界面释放按钮、超出限位支链对应的操作按钮,手动向相反方向移动,可进行复位,报警系统此时停止报警,报警计数器自动进行记录,见图7。

3.3 人机交互流程
人机交换界面用于设置工作需要得初始参数,程序运行后,初始参数进行数模转换,硬件系统产生脉冲信号,伺服系统通过将脉冲信号放大控制电机。电机带动丝杆,使动平台位姿达到夹具需要的角度。人机交换界面上包括自动运行、手动运行、速度倍率调节按钮和运行结果监控显示屏,界面上的 X、Y、Z轴按钮,分别对应 A1B1,A2B2,A3B3支链,见图 8。

4 仿真实验
采用本系统软件对3-UPS-1-PS并联机构进行控制仿真实验。首先,运行Max程序,检测运动控制卡。然后,打开交互界面的启动按钮,输入速度和加速度参数。最后,点击运行按钮[8-10]。系统流程见图9。

为了验证在LabVIEW系统控制下,并联机构能够按照实际工作情况,在规定的运动空间内,灵活、速度的达到目标位姿,通过让A1B1支链运动,使动平台倾斜30°,观察动平台完成实验过程中,其输出速度曲线,见图10。经过试验,动平台在达到预定结果后,速度符合工作要求。)通过实验可证明LabVIEW系统控制下软硬件的可行性。

5 结束语
仿真实验表明,基于LabVIEW的3-UPS-1-PS并联机构控制系统稳定,能够实现独立和联动的控制方式,动平台输出速度平稳,可靠。为了完善对动平台的控制,需要提高系统精度。动平台的位置精度和误差修正将是下一步研究方向,最终目标是提高机构的控制精度。该系统具有以下特点:操作简单,界面友好,操作人员可以对运动参数一目了然。
[1] 郭大杰,沈卫平,胡挺.基于LabVIEW的3-PRRRR移动并联机构控制系统[J] .机电工程,2010,27(8):49-51.
[2] 于洪健.基于并联机器人机构的汽车薄板件柔性装配夹具研究[D] .哈尔滨:哈尔滨工业大学,2010.
[3] 郭庆鼎,孙宣标.现代永磁电动机交流伺服系统[M] .北京:中国电力出版社,2006.
[4] 于淑政,冯继刚,崔国华,等.3UPS-1S并联机构的运动学分析[J] .河北工程大学学报:自然科学版,2011,28(3):97 -99.
[5] 徐立军,何 颖.模糊PID控制结构分析[J] .河北工程大学学报:自然科学版,2012,29(2):71 -74.
[6] 尹一鸣.基于LabVIEW的过程控制实验平台设计[D] .合肥:合肥工业大学,2010.
[7] 刘 溯.1T3R并联机器人设计及其实验装置研制[D] .重庆:重庆大学,2006.
[8] 王 南,张莉婷,郝莉红.空间3-UPU/UPU机构的刚度分析[J] .河北工程大学学报:自然科学版,2012,29(3):85-87.
[9] 丛爽,李泽湘.实用运动控制技术[M] .北京:电子工业出版社,2006.
[10] 陈锡辉,张银鸿.LabVIEW8.20程序设计从入门到精通[M] .北京:清华大学出版社,2007.
猜你喜欢
中学数学教学(2019年3期)2019-06-21
中等数学(2018年8期)2018-11-10
中学数学杂志(高中版)(2018年1期)2018-01-27
新课程·下旬(2018年7期)2018-01-19
中学物理·高中(2016年1期)2016-05-26
肇庆学院学报(2016年5期)2016-03-11
实用手外科杂志(2015年2期)2015-08-28
新高考·高一物理(2015年5期)2015-08-18
饲料博览(2015年4期)2015-04-05
北京航空航天大学学报(2014年1期)2014-12-19
