
平面度误差评定中离散min-max问题研究与软件设计
2012-09-30 09:29林翔
海南大学学报(自然科学版) 2012年4期
林 翔
(福建商业高等专科学校,福建福州350012)
诸如机械加工的零部件,都必然存在实际与理想之间的误差,只有通过检测计算分析,才能评定其误差大小以确定加工成败.此类的形状误差计算,诸如圆度误差、直线度误差、平面度误差等等,一般都涉及到求取离散min-max问题.目前离散min-max问题的计算技术和应用软件,多掌握在欧美及日本等国外几家著名的精密检测仪器研发机构手中,秘而不宣;但从其实际检测的评定结果分析来看,其计算精度亦有局限,平面度方面尤为明显.故笔者从原始概念和定义出发,寻求解决此类min-max问题的新算法,研发高精实用软件,提升评定精度.
1 平面度误差
平面度误差是形状误差的主要内容之一,按《GB/T 1958 -2004》[1]及《JJG 117 -2005》[2]的表述,是指被测物体表面相对于理想平面的变动量.按文献[1-2]要求,平面度误差的计算结果,应该满足最小区域准则,即以理想平面作为基准,使被测物体表面对于基准平面的最大变动量达到最小.
围绕平面度误差的判定准则,专家们研究出了很多评定平面度误差的算法,诸如最小二乘法[3]、最小包容区域法[4]、有序判别法[5]、生物遗传算法[6]等.这些算法的运用,都使平面度误差计算收到不错的计算结果,但由于这些近似算法的先天缺陷,故而计算精度普遍偏低.文献[1]规定,最小包容区域法是最符合最小区域判定准则的,在解决同一个平面度误差计算问题得出不同计算结果时,它是终极评定方法,并以它的结果作为最终仲裁.
归纳这一准则,其要点就是求取2个平行的平面,把被测表面夹在其间,且2个平面之距达到最小.可以这样认为,对于同样一个被测平面,求得的2个包容平面之间距越小,就越接近真值,其算法就是好算法.笔者紧紧围绕平面度误差概念,在目前已经被广泛使用的平面度误差算法的基础上寻求算法,使计算继续进行下去,引导计算结果逐步向最小条件靠拢,从而更精确地评定平面度误差值.
2 探寻新算法
一般情况下,物体的表面形状,是由在表面上测量得到的若干点Pk(xk,yk,zk)(k=1,…,n)来描述的.从最小包容区域法规定可知,平面度误差计算的关键在于求一对平行的平面,它们包容所有测量点Pk(k=1,…,n),并使平面间距离达到最小.这是一个典型的离散min-max问题.
找到这2个平行平面并不难,可以有很多办法,比如最常见的最小二乘法.不论以何种方法求得基准平面,不妨记其方程为π:ax+by+cz+d=0(如图1所示),从而求得最小二乘意义下的平面度误差值,如设δ.此误差计算结果是国标[1]认可的,在精度要求不高的情况下已具有实用意义.

图1 基准平面与被测平面示意图
在此基础上,如何对π进行细微的转动,把δ的值降下来,使之向min逼近,是解决min-max问题的焦点.笔者经过观察分析发现,通过有意识地扰动平面π的法方向,使δ值下降成为可能.
设平面π:ax+by+z+d=0(为了讨论方便,此处令c=1.00)是通过最小二乘法拟合得到的初始基准平面,样本点Pk(k=1,…,n)到π的距离为δk(代数值),其中最大值为δi,最小值为δj,对应的点分别为Pi,Pj,记δi=max(δk),δj=min(δk)(k=1,…,n),δj一般情况下为负值;记 δ=| δi- δj|=max(δk)-min(δk)=max(δk)+max(- δk)(k=1,…,n).
Pi在π的投影点为Ai,Pj在π的投影点为Aj,沿着AiPi方向距Ai点ε处(ε是一很小的值),记作Ai'点;同样沿AjPj方向距Aj点ε处,取Aj'点.设Ai',Aj'的中点为Q,在平面π上求得点Q',使直线Q'Q⊥Ai'Aj'.通过这新获得的Ai',Aj',Q'3个点,做一个新的平面π'.显然,π与π'的夹角很小,可以把π'看作是将平面π绕直线Q'Q作微小转动以后获得的,从平面方程来看就是π的法向量T(a,b,1)发生微小改变.
设由 Pi,Pj,Ai',Aj'各点构成的平面为 π1,平面 π 经平面π1剖切,其剖面图如图2所示.易见,Pi到平面π'的距离δi'小于 δi,即小于 max(δk),Pj到平面 π'的距离 δj'同样下降了,亦即小于max(-δk),这正是笔者所期盼的:由于将π微小转动生成π',可能把当前的δ=max(δk)+max(-δk)降下来.
能否令δ值下降,须计算Pk(k=1,…,n)对π'的新平面度误差值δ'并与δ作比较,分如下3种情况分别判断:
1)若δ'<δ成立,π'取代π,重复上述对π微小扰动、计算、判断过程;
2)若δ'<δ不成立,缩小ε值并重新求平面π',重新计算δ'并判断其是否下降;
3)若ε已缩小为非常小的值,达到计算精度要求,则计算终止,此时之δ即最终的平面度误差值.
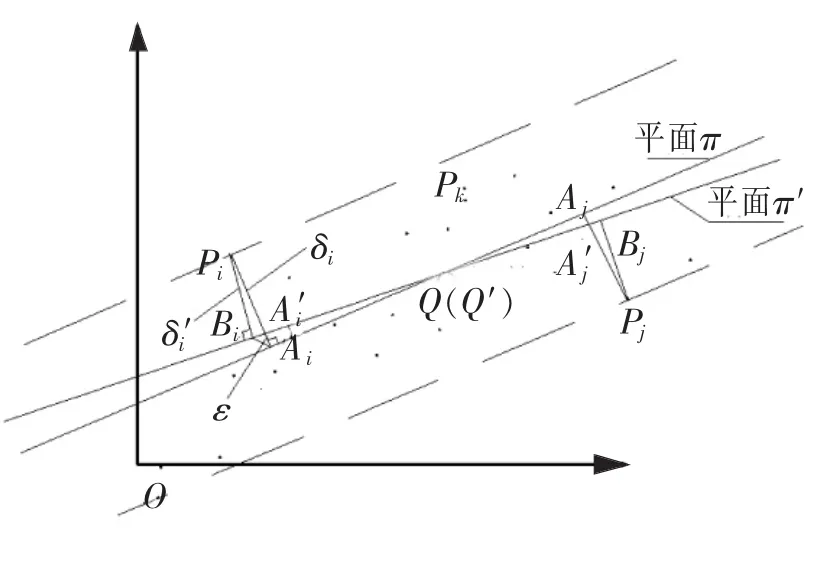
图2 点集Pk与平面π,π′关系图
3 算法的收敛性
对于平面π,π',设Pi在π的投影为Ai,在π'的投影为Bi,如图2所示.观察△PiAiBi,易见∠PiBiAi为钝角,因钝角的对角边PiAi长度必小于任一邻边,故PiBi<PiAi成立;同理,对于Pj亦存在1个钝角三角形,Pj至π'的距离比Pj到π的距离小,亦即PjBj<PjAj成立.
综上,显然有PiBi+PjBj<PiAi+PjAj成立,即δ'<δ,这正是所期待的.平面π经微小扰转后,Pk(k=1,…,n)对于新平面π'的δ'值,较之δ一般情况下是单调下降的,这表明平面度误差的计算过程是收敛的,趋于min-max.
算法过程的终止条件为:当ε随着计算过程不断缩小,小到计算要求的精度,经过扰动得到的π',其δ'=|δi'-δj'|不能再有所下降,即停止计算过程,输出δ.
按上述算法演算至此,平面π即使只作微小扰动,对应的δ不但不减小,反而增大,由此说明,经过一步步单调下降的计算之后,得到的δ极其接近平面度误差真值了,离散min-max问题也得到了解决,所获得的计算结果符合平面度评定中最小条件准则.
4 算法实施
从原则上讲,本算法中初始平面π可以是任意给出的,其收敛过程对其并无任何依赖.但若是初始平面选择适宜,计算过程会收敛得更快.本算法以最小二乘平面作为初始平面.

最小二乘平面的目标方程为

要使D达到最小,只需令

联解3个等式,即可求得初始π的法向量T(a,b,1)及d,平面π的方程也就确定了;再求出Pk(k=1,…,n)相对于平面π的δ=|δi-δj|,δ即最小二乘意义下的初始平面度误差值.
4.2 以初始平面π为基础实施本算法 求得Pk(k=1,…,n)相对于π的正最远点Pi、负最远点Pj,它们在 π 的投影点分别为Ai,Aj,相应的距离为 δi,δj.沿AiPi方向距Ai点 ε 处取点Ai',沿AjPj方向距Aj点 ε 处取点Aj',记Ai'Aj'的中点Q,Q在π的投影为Q',则Q'Q⊥Ai'Aj'.由Ai',Aj',Q'3点做平面π'.获取π'之此过程,称为扰动.
对于 π',参照上述求 δ的过程,求出Pk(k=1,…,n)相对于 π'的2 个正负极值,设为 δl',δm',令 δ'=| δl'- δm'|.对于 δ',δ作如下比较与判断:
1)若δ'<δ成立,π'取代π,在π基础上求取平面π',并进行同样的计算和比较;
2)若δ'<δ不成立,分2种情况分析处理:
①将ε减小,取ε=ε/2重新求出平面π',求出相应的δ',返回1);
②如果ε随计算过程已缩小为极小值,满足精度要求,即停止计算,δ即为最终的平面度误值.
4.3 特殊情况处理 算法过程中,若Pk(k=1,…,n)至平面π之正最远点与负最远点不是惟一的,即同属于Pi之类的点有R个,Pj之类的点有S个(R,S≥1),不妨将R个Pi与S个Pj进行两两配对,那么就产生R*S个组合;对于任何一对Pi,Pj组合,均可进行计算过程,求得相应的平面π'和δ'值.如此求得R*S个δ'值,选出最小者δ'min,令δ'=δ'min,进行1),2)之比较判断过程,直至满足条件而终止计算,输出δ.
4.4 程序流程图 如图3所示.
被测物体表面的样本点是三维空间的点,且点数较多,因此其算法过程不仅复杂,且计算量大,同时考虑到程序运行完成后要提供具有图示化后处理的功能.因此选择面向对象既长于计算又具有绘图功能的C++作为编程语言.
5 算例及分析
上文从理论上证明本算法收敛于最小区域,得到min-max,满足最小条件,以下通过具体算例加以验证.

图3 程序流程图
文献[7]表3所给的一个算例,平面上5*5=25个测量点,原文以POWELL法计算得到的平面度误差值为8.5 μm;以本文算法程序计算得到的平面度值为8.499 995 3 μm(基准平面法矢:a=-0.000 233,b=0.000 017,c=1.00).
从以上2个算例的计算结果可见,本文算法与原文的算法精度基本一致.
文献[8]给出的算例,平面上测量点有10*10=100个,原文得出的平面度为7.896 321 μm;本文算法计算得出的平面度为5.513 157 8 μm(基准法矢:a=0.000 014,b=0.000 010,c=1.00).
文献[9-10]给出的同一算例,平面上有5*5=25个样本点,其计算出的平面度误差为0.155 2 mm[2]和0.156 6 mm[10];用本文算法程序进行计算,得出的平面度误差为0.154 869 6 mm(基准法矢:a=-0.026 200,b=-0.054 200,c=1.00).
同样对文献[4-6]所提供的算例进行验算,原文给出的平面度误差值分别为30.25 μm,6.55 μm和8.755 6μm;本文算法程序计算的结果分别为 30.246 612 μm,6.549 999 71 μm 和 6.55 μm.
比较计算结果,本文算法程序计算得出的平面度误差值均小于原文作者所给出的,可见,本文算法在计算精度上有一定的优势.
6 小结
平面度误差值的高精度求取,是典型的离散min-max问题.从计算模型的整定和所寻求的算法原理看,本文算法是围绕平面度误差评定中最小区域展开的.在算法过程中,测量点集Pk(k=1,…,n)对于平面π距离最远发生在哪个点,π就往该点的方位作微小的扰动,保证了计算过程不断地向真值收敛,直至该平面π不能有丝毫扰动为止.本文算法是以最小二乘平面为初始基准平面的,所以算法的整个过程收敛速度很快,实例运算中也说明了这一点.为了计算的方便,尽量将被测平面置于三维坐标系的XOY平面上,尽可能与Z轴垂直.本文算法初始基准平面的选取方法,不局限于最小二乘平面法,与其他算法计算结果相比较,其精度都有一定程度的提高.
[1]中华人民共和国国家质量监督检验检疫总局.GB/T 1958—2004产品几何量技术规范(GPS)形状和位置公差检测规定[S].北京:中国标准出版社,2004.
[2]中华人民共和国国家质量监督检验检疫总局.JJG 117—2005平板检定规程[S].北京:中国标准出版社,2005.
[3]张昉.平面度误差的最小二乘法分析[J].械制造与研究,2002(3):20-22.
[4]吕震宇.一种使用最小包容区域法基于旋转变换求解平面度误差的方法[J].河北理工学院学报,2000(l):49-59.
[5]张之江,于瀛洁,张善钟.平面度误差最小区域新算法—有序判别法[J].计量学报,1998(1):16-22.
[6]温秀兰,宋爱国.基于实数编码的改进遗传算法及在平面度误差评定中的应用[J].计量学报,2003(2):10-13.
[7]彭祖行.形状误差的优化算法[J].计量学报,1992(4):7-12.
[8]蔡改贫,朱同发.单基准给定方向轴线对平面倾斜度误差的评定[J].南方冶金学院学报,1998(3):179-183.
[9]温秀兰,赵茜.基于进化策略的平面度误差评定[J].仪器仪表学报,2007(5):66-70.
[10]薛小兰.遗传算法及其在平面度误差评定中的应用[J].晋中学院学报,2009(3):12-14.
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学物理学报(2019年4期)2019-10-10
贵州师范学院学报(2016年3期)2016-12-01
公民与法治(2016年19期)2016-05-17
中国学术期刊文摘(2016年2期)2016-02-13
新乡学院学报(2015年6期)2015-11-06
电源技术(2015年11期)2015-08-22
读者·校园版(2015年7期)2015-05-14
电网与清洁能源(2015年2期)2015-02-28
电力工程技术(2014年5期)2014-03-20
