
一种地基雷达回波模拟器设计与FPGA实现
2012-09-30 02:08宗竹林曹建蜀
火控雷达技术 2012年1期
盛 寰 陶 君 宗竹林 曹建蜀
(电子科技大学 成都 611731)
1 引言
近年来,随着各国对空间领域的探索,空间目标探测与识别在空战攻防中扮演着越来越重要的角色。如何对空间目标进行有效的跟踪和识别,如何研制高效可靠的空间目标探测雷达系统,已成为当今重要军事课题。随着雷达功能日臻完善和复杂,对空间探测雷达系统的可靠性和完备性的验证和测试也成为雷达系统设计的一个重要课题。利用雷达回波信号模拟技术,既可以提高雷达研究和设计的效率,又可以减小研究成本。
2 雷达总体回波组成建模与仿真
空间探测雷达发射机发出一种特定形式的电磁信号后,接收机会接收到经过不同物体调制过后的回波信号,其中包括待测目标,云雨等气象因素,人为干扰因素等。由于各种散射体体积,径向距离,速度,方位等特征各异,因此同一种电磁发射信号会被调制生成不同的回波信号,而这些信号又在同一种传播介质中线性叠加,最终合成接收的回波信号。而且通常电子元件工作时有热效应,所以收到的实际回波信号还会混杂着接收机内部产生的热噪声。
综上所述,雷达回波信号可以抽象成四个部分组成:目标、杂波、噪声、干扰回波信号,理想回波信号可以建模如下[1]:

其中,s(t)为目标回波信号;n(t)为杂波信号;c(t)为噪声信号;j(t)为波干扰信号。
雷达回波模拟即是通过建立上述各种信号的数学模型来复现各种环境下回波信号的。
2.1 目标反射回波建模
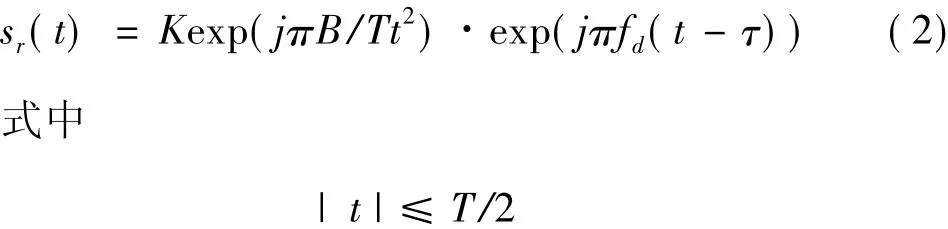
以脉冲压缩体制雷达为基础,分析目标的回波模型。设发射信号带宽、脉宽分别为B、T的LFM(线性调频)信号,经过径向距离为R,径向速度为V的目标调制,产生多普勒频移为fd=2V/λ,延时为τ=2R/c,其中c为光速,不考虑载频,目标的回波信号如下式[2]:
2.2 接收机噪声建模
在雷达系统中存在着的噪声可看作是在接收信号sr(t)上进行相加的高斯白噪声。要模拟检波后包络服从瑞利分布的白噪声,需要模拟产生两路正交独立的标准正态分布随机数,根据变换抽样法可以得到计算公式为[3]:

式中,λ1、λ2分别是两个独立的(0,1)均匀分布随机序列随机数;σ为噪声均方差;μ为噪声的均值。
2.3 干扰建模
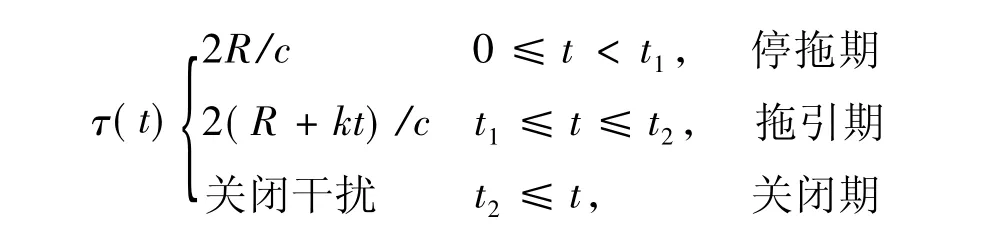
有源干扰是通过人为产生的辐射信号,进入接收机干扰目标识别。分为压制式和欺骗式。而欺骗式又可以把虚假信息加入距离,速度等参数。本文主要实现距离和速度拖引干扰。
干扰一般分为三个阶段,第一阶段是停拖期,干扰机检测发射机信号,并识别相关信息以发射相似信号干扰。第二阶段,干扰机发射强度超过正常回波带有干扰信息的虚假回波信号,并持续一段时间,直到雷达接收机的信息检测波门被拖出干扰机原始回波的信息检测波门,此时接收机检测到的是虚假信息。第三阶段,停止干扰,此时接收机因为突然丢失信号,进入全频扫描搜索阶段,雷达接收机信息空白,维持一段时间,然后重复此三阶段。由于干扰机的存在,使得雷达接收机反复工作在提供虚假信息和全频扫描搜索阶段,进而无法正常工作。
2.3.1 距离拖引干扰建模
距离拖引干扰建模如下:
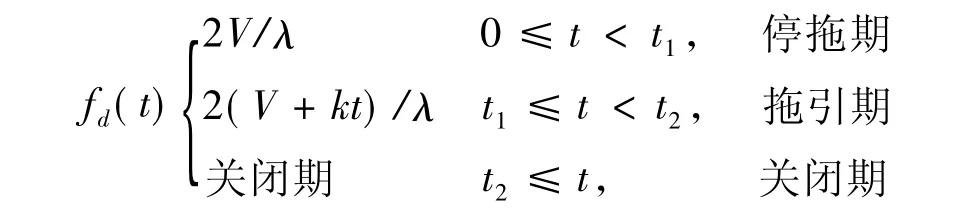
2.3.2 速度拖引干扰建模[4]
速度拖引干扰建模如下:
综上,带干扰的雷达回波Sri(t)可以建模如下:

式中,K定义同式(2)。
2.4 杂波建模
当雷达分辨力较低(脉冲宽度>0.5μs或天线波束宽度大于2°)时,杂波的幅度分布通常满足瑞利分布类型。根据中心极限定理可以导出此时杂波的幅度分布为高斯型[5],其包络服从瑞利分布:


3 模拟器实现方案
本方案正是沿着上述软硬件结合的设计思路,使用通用计算机配置加FPGA主运算的架构,充分发挥软件的灵活性和硬件的实时性。将各功能子模块独立封装,彼此间通过接口协议协调工作,模拟器结构设计如图1所示。
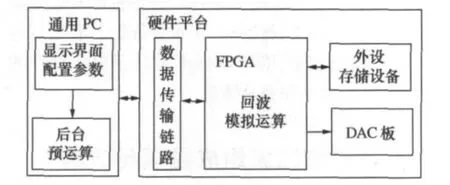
图1 模拟器总体设计图
整个系统包括两个部分,分别是通用计算机平台(或工作站)和专用硬件模拟板(虚线框分隔所示)。其中,计算机辅助硬件模拟器,主要完成参数的动态配置、数据的预处理、以及对硬件模拟板的控制。硬件模拟板是模拟系统的核心,在所设计的硬件平台上需要完成对各种信号的模拟,以及数据的存储、传输和视频信号的显示(D/A)等。FPGA内部详细功能模块如图2所示。
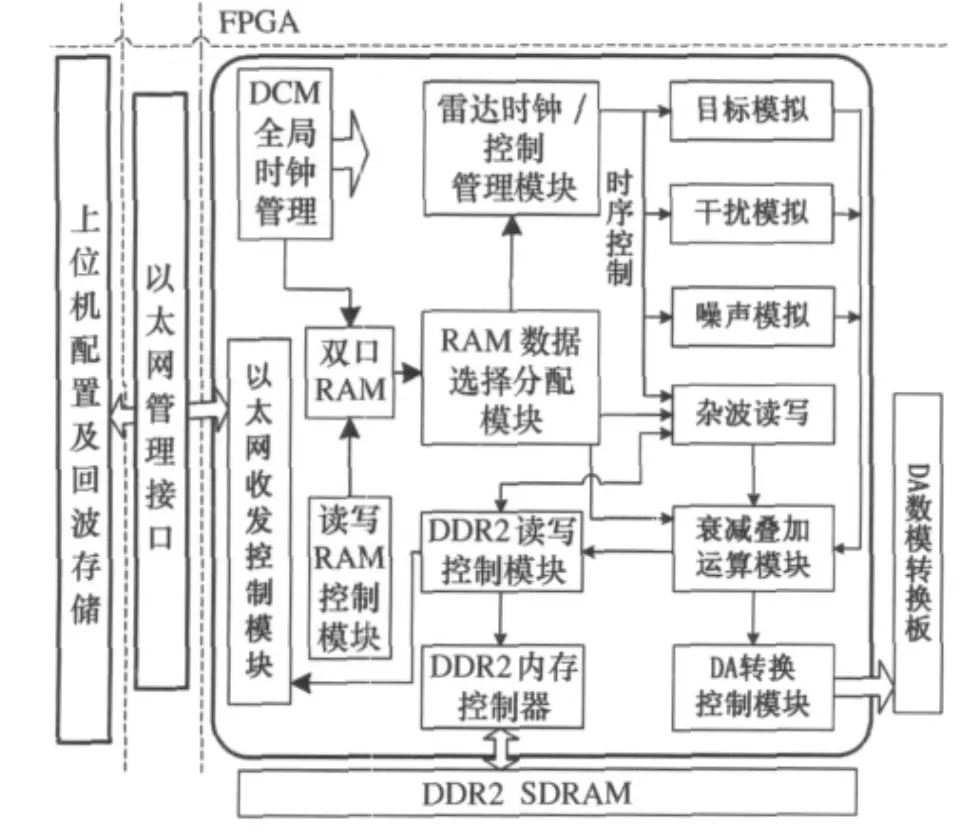
图2 FPGA内部功能模块实现
3.1 目标回波模拟
根据欧拉公式,对于LFM(线性调频)发射信号St(t)=exp(jπB/Tt2),可以将其变形为:

式中正余弦部分分别表示信号的实部、虚部。采用线性查找表实现三角函数,发射信号的实现方式如图3所示。
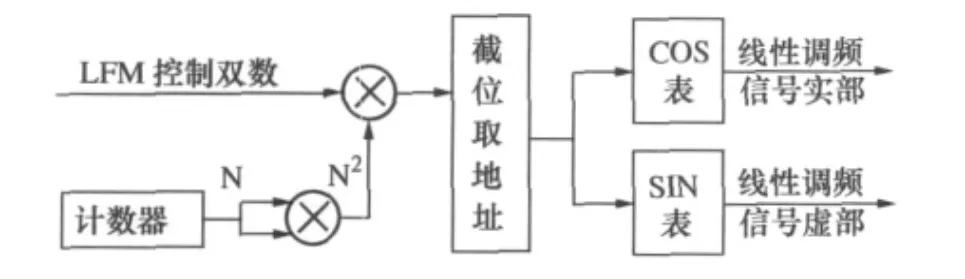
图3 线性调频信号实现方式
同理对于多普勒产生的信号频移,如式 exp[j4πVf0(t-τ)/c],实现方式类似,如图4 所示。
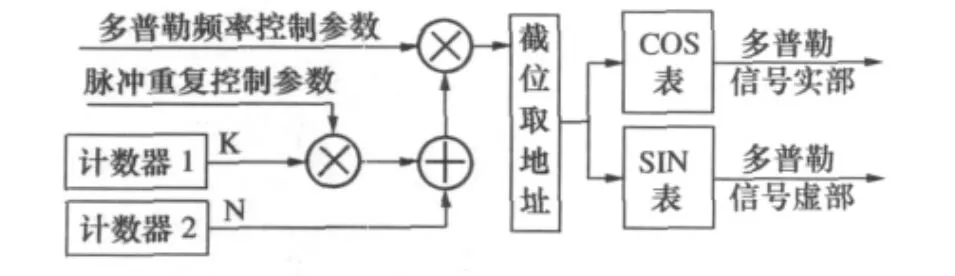
图4 多普勒频移实现方式
3.2 噪声模拟
根据2.2节中所述噪声建模方式,正交高斯白噪声实现方式如图5所示,其中18位线性反馈移位寄存器(LFSR)的本证多项式为x17⊕x6⊕1,对应的互反本证多项式为x17⊕x10⊕1,本证多项式可以构造周期为(218-1)的伪随机数。互反的两个LFSR的18位状态值即为周期内反向变化的伪随机序列。LFSR的构造如图5所示。
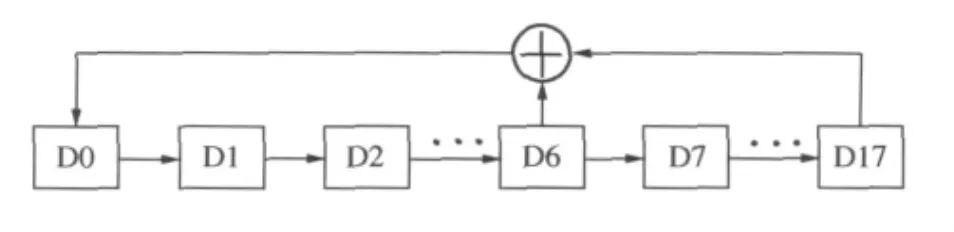
图5 18位LFSR构造
同样采用线性查找表的方式,高斯白噪声的硬件实现框图如图6所示。
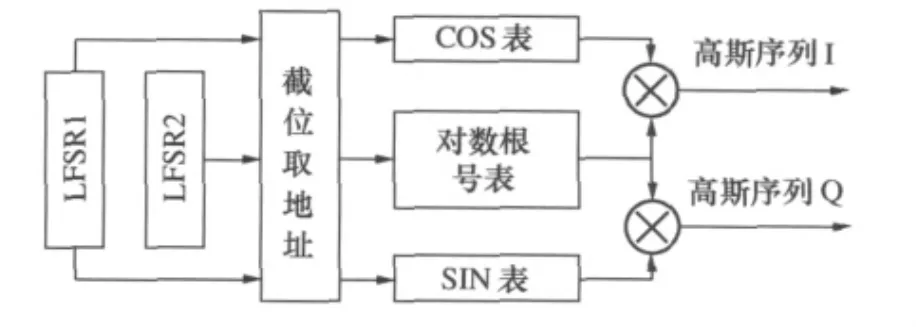
图6 正交高斯序列生成框图
3.3 干扰模拟
3.3.1 距离拖引干扰
距离拖引干扰表现在回波延时τ的变化上,可以在前文回波多普勒模拟的基础上,通过把延时计数器加另一受状态机控制的延时计数器值完成。实现框图如图7所示。
图7中K1和N1是基于距离拖引干扰的延时τ控制的计数器。
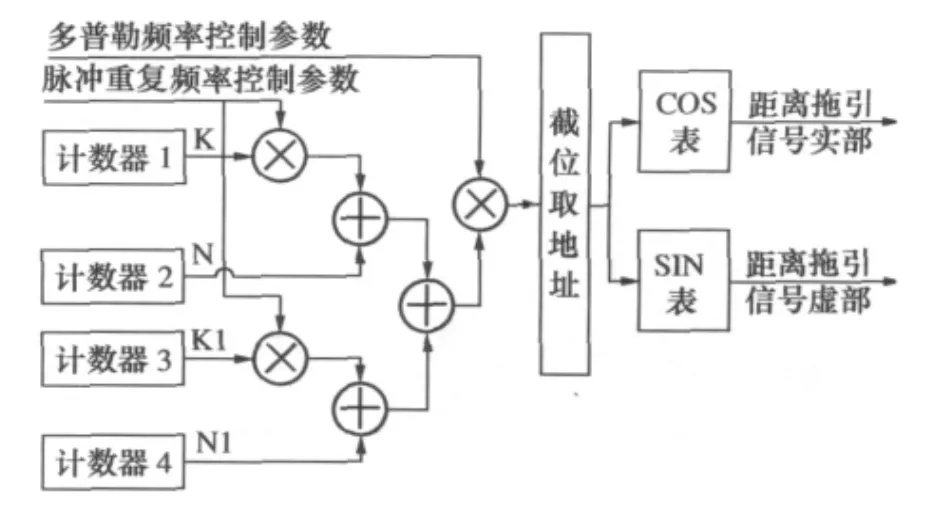
图7 距离拖引干扰实现
3.3.2 速度拖引干扰
速度拖引干扰表现为多普勒频移叠加另一变化的频移,在多普勒频移实现方式的基础上,通过把多普勒频移的值加另一个受状态机控制的多普勒频移值完成。实现框图如图8所示。

图8 速度拖引干扰实现
3.4 杂波实现方式
对于云雨杂波,数学模型可以表示为幅度x(n)服从瑞利分布,功率谱S(w)服从高斯分布的随机序列。因其计算量不大,上位机计算快,而计算过程的硬件实现损耗资源过多,因此云雨杂波通过PC机模拟,把数据通过以太网下传后存储于 DDR2 SDRAM中,按时序读取。其计算流程如图9所示。

图9 杂波计算流程
4 模拟结果及分析
4.1 目标模拟结果
设目标和雷达平台之间距离R=50km,速度V=10km/s,波束指向与目标方向相同,雷达脉宽Tp=40μs,带宽 B=40MHz,脉冲重复频率 Fr=250MHz,积累脉冲数K=50,一个脉冲重复时间内的采样点数M=1000,回波通过DA转换输出后,示波器观察点目标时域实部虚部波形图和频谱仪所示信号频谱图如图10、11所示,其中采用的DA芯片是AD9736,数据位宽14比特。
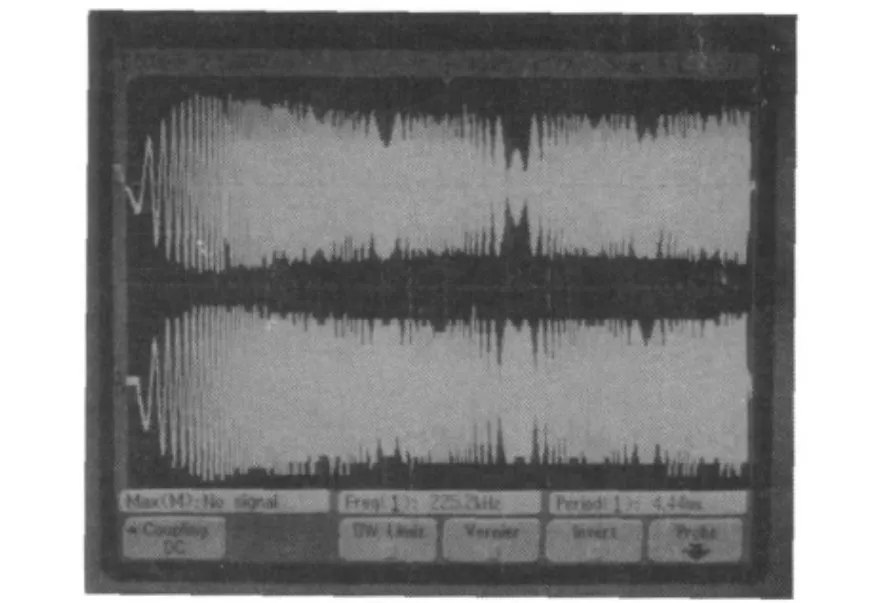
图10 目标时域波形
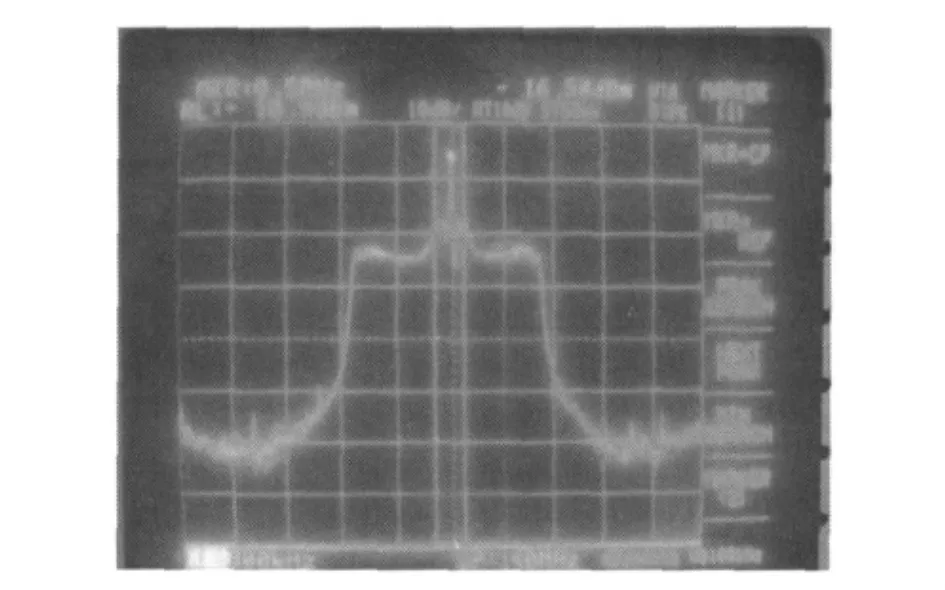
图11 目标信号频谱
图11中频谱中心是零频峰值,频谱带宽是50MHz。实际应用中经后端隔直电容以及交流耦合的AD数据采集,结果显示数据无误。
把FPGA仿真结果通过以太网回传到配置PC上硬盘存储,提取前4组数据与Matlab仿真结果对比见图12、13。
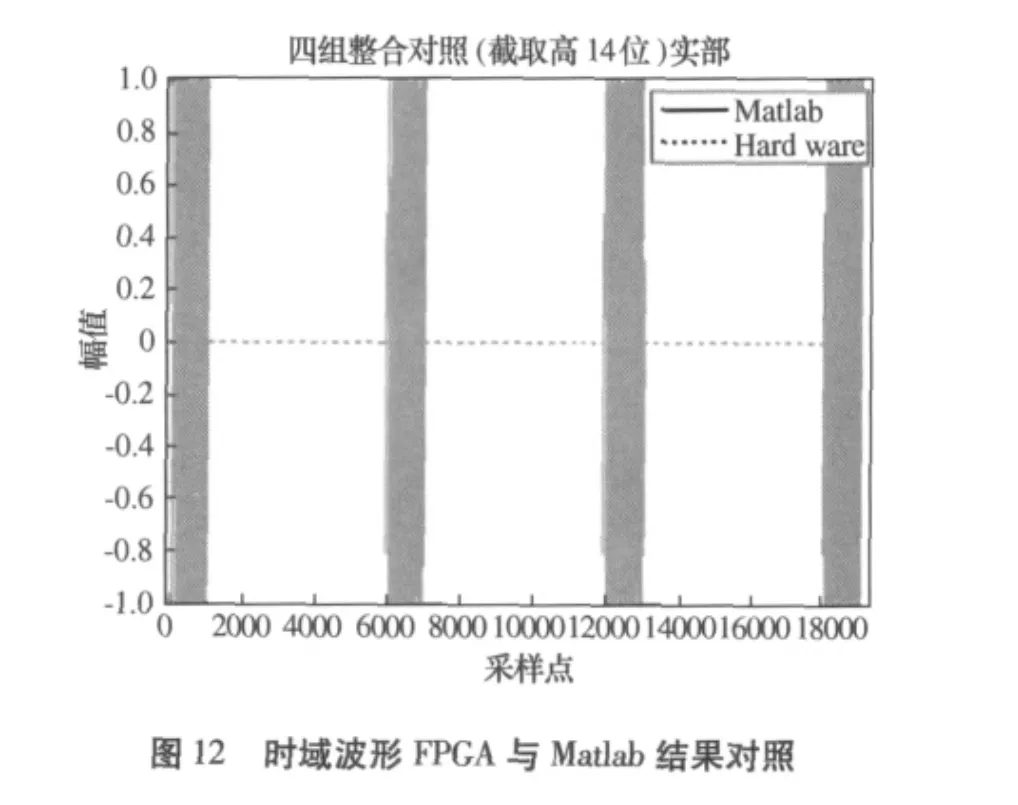

图12中绿实线是Matlab值,红虚线是FPGA硬件仿真值,容易观察两者基本重合。图13中显示两组数据相对误差最大值1.09%,数据正确。
4.2 噪声模拟结果
设采样率Fs=50MHz,采样周期Ts=0.1ms,运用计算机仿真可得高斯白噪声I、Q两路5000点的采样序列如图14所示。统计仿真结果显示模拟序列服从正态分布。
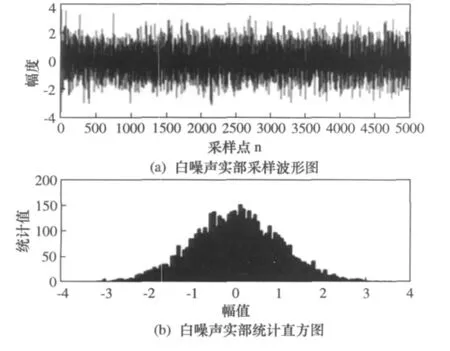
图14 高斯噪声波形及统计图
4.3 干扰模拟结果
4.3.1 距离拖引
选取干扰的拖引周期为20μs,干扰目标相对速度Vf=5km/s,采样率Fs=50MHz。干扰期内干扰波形和目标回波的叠加波形如图15所示。

图15 距离拖引干扰仿真图
4.3.2 速度拖引
选取干扰的拖引周期为30μs,真实目标速度Vt=10km/s,干扰目标相对速度Vf=1km/s,加速度为af=1km/s2,采样频率Fs=50MHz以及雷达脉冲重复频率Fr=50MHz。其拖引过程的多普勒调制信号在Modelsim仿真结果如图16所示。

图16 速度拖引干扰仿真图
4.4 杂波模拟结果
设信号脉宽 Tp=50μs,脉冲重复频率 Fr=1kHz,采样率Fs=50MHz,杂波宽度(所占距离单元个数)L=50,杂波速度V=3m/s,发射信号带宽B=50MHz。可得幅度谱服从瑞利分布以及功率谱服从高斯谱的杂波信号如图17、18所示。


5 结论
本文以空间探测雷达仿真系统为背景,研究并完成了雷达回波信号半实物模拟器的设计与实现。对目标回波,接收机噪声,干扰以及气象杂波进行了建模、仿真,并且在Virtex-5 FPGA平台ML510上硬件实现。相比以往的雷达模拟器平台,该雷达模拟器首次实现了干扰的硬件设计,回波组成部分更加完善,真实性和实用性都有一定程度的提升。
[1]任丽香,龙腾.一种通用雷达信号模拟器的设计与实现[J].现代雷达,1998,(6).
[2]谢建民.线性调频雷达回波模拟和信号处理研究[D].电子科技大学,2008.
[3]黄莉.地基雷达的回波生成和信号处理方法研究[D].电子科技大学,2006.
[4]刘东红,张永顺.对脉冲压缩雷达的移频干扰及其实现[J].电子对抗,2004,(2):15 -17.
[5]吴顺君,梅晓春等.雷达信号处理和数据处理技术[M].北京:电子工业出版社,2010,60-61.
猜你喜欢
导航定位学报(2022年1期)2022-02-17
科学与信息化(2021年30期)2021-12-24
小哥白尼(趣味科学)(2021年6期)2021-11-02
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
电子制作(2016年1期)2016-11-07
