适用于山区输电线路优化设计的机载激光雷达数据采集与处理方法
2012-09-29 01:28汪岩松许邦鑫
电力勘测设计 2012年5期
汪岩松,许邦鑫,刘 平
(安徽省电力设计院,安徽 合肥 230601)
当前,电网建设呈现出电压等级高、规模大、路径长等特点,随着社会发展,线路规划走廊的位置确定愈加困难,线路走廊常常穿越植被覆盖十分密集的山区,这给输电线路的勘测和设计工作带来了很大的困难,也对勘测设计提出了更高的要求。在这种情况下,新的技术手段得到应用,机载激光雷达测量技术(Airborne LIDAR)就是其中的一种。
机载激光雷达测量技术是一种主动式遥感对地观测技术,一般以飞机或直升机作为飞行平台,通过激光测距获取地表高程信息。由于激光雷达测量系统发射的脉冲波可以穿透植被,即使在植被覆盖十分密集的山区,机载激光雷达测量技术也能获得高精度的数字高程模型(Digital Elevation Model, DEM),这是传统航空摄影测量技术所不能比拟的。正是由于这一优势,机载激光雷达测量技术开始应用于输电线路(特别是山区的输电线路)工程实践。
目前,利用机载激光雷达测量技术,国内有多家电力设计院或独立完成,或与科研院所合作共同完成了一些输电线路的勘测设计工程项目,积累了不少宝贵的经验。可以预见,机载激光雷达测量技术作为一种新兴的对地观测技术,将在电力行业得到更广泛的应用。
从目前国内已有的相关工程应用实践能够看出,机载激光雷达测量技术应用于平原地区或植被覆盖一般密集的山区的电力勘测设计是比较成功的,但在植被覆盖特别密集(水平方向和垂直方向的植被覆盖都十分密集)的山区,取得的效果并不理想。这是由于尽管激光雷达测量系统发射的脉冲波可以穿透植被,但在植被覆盖特别密集的山区,一次扫描能够完全穿透植被,打到地面的激光脚点并不多,这会造成大面积的地面点缺失,从而影响DEM的质量。
其次,在后续LIDAR数据的处理过程中,目前计算机自动分类的大多数算法应用于带有植被的粗糙山地时都会产生或多或少的错误。人工干预能避免这些错误,但这一方面对作业人员的素质要求较高,另一方面效率很低。
再次,所前文所述,山区的LIDAR数据既存在数据采集过程中地面点可能过少的问题,又存在数据处理过程中分类可能不到位的问题,所以由此生成的DEM的质量在某些区域并不可靠,但如何评价机载激光雷达测量技术生产的DEM的可靠性,目前尚没有好的方法。
本文的主要目的便是解决目前机载激光雷达测量技术应用于山区输电线路工程的上述问题,以保证LIDAR数据的质量,提供更可靠的最终产品,更好的为输电线路的优化设计服务。
1 机载LIDAR数据采集一般流程
1.1 空域申请
在执行任何一个航摄任务前必须按规定向有关部门申请空域取得航飞权。由于机载激光雷达测量系统通常带有CCD相机,所以航飞权期间,应选择天气较好的时段进行飞行,以保证航拍影像的质量。
1.2 航飞设计
在进行航飞设计时,应遵循安全、经济、周密、高效的原则。航飞设计的底图,一般宜采用1/1万、1/5万比例尺地形图或具有空间地理定位的遥感卫星影像。使用专门的航飞设计软件(如Leica的FPES,IGI的WinMP,Riegl的TrackAir),以审查后线路路径走向为导向,连续布设若干个首尾相连的航摄分区覆盖线路带宽范围的带状摄影,各航摄分区的设置宜在保证覆盖的前提下对弯曲的地段拉直航线,选用尽量少的航线。专门的航飞设计软件通常能导出GoogleEarth支持的飞行路径文件,所以在航飞设计完成后,可以使用该文件在GoogleEarth中进行模拟飞行,以检查设计质量和发现安全隐患。
1.3 地面GPS基站布设与测量
根据摄区情况,必须合理布设至少1个基站,且摄区内任意位置与最近基站间距离不宜超过50km。 站址点应位于开阔处,附近无电波干扰,卫星信号接收情况良好,且易于保存。可以充分利用符合要求的已有控制点作为站址点,当基站点坐标未知时,应对基站点实施GPS静态定位测量,观测和坐标解算应按D级GPS网要求进行。
本工程布设了5个基站,间距约20公里,设计基站点位位于飞行覆盖区域内,可用基站点坐标对点云处理结果进行对比校核。
1.4 数据采集
在飞机起飞前30min,打开地面基准站上GPS接收机,在飞到测区之前,打开POS系统,静止一段时间,接着按“8”字形飞,飞完之后直飞5min,以保证POS系统处于最佳工作状态,然后开始数据采集。在测区进行数据采集时,飞机可按设计航线自动飞行,扫描仪及相机、POS系统按设置的参数进行数据采集。数据采集完之后再依次直飞5min、倒“8”字形飞、静止几分钟,关掉POS系统,地面GPS接收机待飞机关掉POS系统后30 min再关。如果机场距离测区较远,就不用在采集测区数据前后飞倒“8”字形。总之,在采集数据之前,要保证POS系统处于良好的工作状态。
2 机载LIDAR数据处理的一般流程
2.1 预处理
预处理工作主要包括DGPS数据预处理计算、偏心角计算以及对观测质量、共星情况和解算精度的检查,其中偏心角的计算方法是:通过检校飞行获取的激光数据,叠加对比往返航带中各明显地物激光数据的差异,逐渐调整偏心角数值,在激光数据达到完全一致时的偏心角,即确定为IMU与激光扫描仪的实际偏心角。
2.2 点云分类与DSM、DEM制作
在对点云分类前,应首先将激光点云中的粗差点予以剔除。点云分类的目的是将植被、人工建筑等非地面点云数据与地面点云数据分开,并把所有的地面点云数据单独提取出来。在点云分类完成后,应进行分类质量检查,目前一般采用目视检查的方法。
利用剔除粗差后的点云数据就可以进行数字地表模型(Digital Suface Model,DSM)的制作,利用分类后得到地面点云数据就可以进行DEM的制作,目前较常用的方法是通过一种扩展的狄洛特三角网进行内插。
2.3 DOM制作
利用机载GPS/IMU所获取的影像外方位元素,以及分类后的地面点云数据或制作完成的DEM对航空数码影像进行正射纠正后生成DOM。正射纠正过程中影像的分块大小应适当,影像与影像之间要保证一定的重叠度。
3 适用于山区输电线路优化设计的LIDAR数据采集与处理改进方法
3.1 航飞设计的改进
在水平方向和垂直方向的植被覆盖都十分密集的山区,由于植被叶面间的空隙很少,激光雷达系统发射的脉冲波穿透植被的概率大幅度下降,使得部分区域没有或只有少量的地面点,制作DEM时,这些区域的高程值需要通过内插得到。当区域较小或地形较平坦时,该区域的DEM质量一般是可靠的;但当区域较大或地形变化较剧烈时,该区域的DEM就不可靠了。
不考虑地形、植被分布、植被叶面含水量等因素,脉冲波穿透植被的概率与单位面积内脉冲波的密度、脉冲波的入射方向以及脉冲波的发射能量有关。因此,可以通过以下方式来增加脉冲波穿透植被的概率:
(1)增加单位面积内脉冲波的密度,实际上就是单位面积的点密度。点密度与飞行高度、扫描角以及飞行速度有关,飞行高度越低、扫描角越小、飞行速度越慢,点密度就越大。在进行航飞设计时,点密度和扫描带宽常常不能兼顾,因为扫描带宽与飞行高度和扫描角有关,飞行高度越高、扫描角越大,扫描带宽越宽。为了同时保证扫描带宽和点密度,可以采取一定重叠度的多航带飞行方案。
(2)一次扫描中,脉冲波以某一个入射角度射向地面,如果再增加一次或多次扫描,脉冲波就能以两个以上的不同角度射向地面,这样脉冲波穿透植被到达地面的可能性就增加了。增加扫描次数实际上就是增加航带,如果使用双航带,让两次飞行的路径位于线路走廊的两侧,就可以保证航带重叠区各点能接收到两次不同入射角度的扫描。
(3)增强脉冲波的发射能量。脉冲波的发射能量与仪器有关,在增强脉冲波的同时,需要考虑激光束的安全性。
本研究提出了一种双(多)航带飞行模式,一般地区采用重叠度60%的双航带飞行,特殊区段采用重叠度50%的三航带飞行,这种设计方法并不会造成总航带数量明显增加,因为山区的输电线路工程通常短耐张段比较多,按常规飞行设计飞行航带多,零碎,不利于飞行。这种设计方法既可以保证扫描宽度,也能确保中心区域有足够的点云密度,满足对中心区域高程精度的需求,同时未明显增加航带数量,方便飞行,节约了飞行成本和航拍时间。
3.2 点云滤波人工干预的改进
目前用于计算机自动滤波的大多数算法应用于带有植被的粗糙山地时都会产生或多或少的错误,因此需要进行人工干预。为了在满足工程需要的前提下,减少人工干预的工作量,可以采取如下方式:首先,从计算机自动分类后的点云中提取地面点并制作DEM,在首次DEM上进行线路选线,测量首次平断面等工作,提交设计人员进行排杆定位,随后根据排杆定位的成果,对所有的立塔点附近区域和危险点、关注点附近区域进行DEM检查和手工分类,称为二次精纠正,以排除这些重点区域的分类误差。实践证明,这种方法是行之有效的。方法既确保了测量、设计的成果可靠性,避免粗差和错误,又保证了工作效率,减轻工作量,保证设计工期。
3.3 一种DEM可靠性评价方法
为了评价DEM的可靠性,本研究提出如下一种方法:首先从原始点云数据中提取用于生成DEM的地面点,并将其以一定的格网大小进行分块,再扫描每一个格网。如果该格网中包含两个以上的点,或者该格网只含一个点但在相邻格网中有满足一定距离要求的点,则认为这一区域的DEM是可靠的,并将这些可靠的格网按上述两种情况分别赋一颜色值;反之,如果该格网中没有点,或者只含有一个点且在相邻格网中找不到满足一定距离要求的点,则认为这一区域的DEM可靠性差,同样对这些不可靠的格网按上述两种情况分别赋一颜色值。这样,就可以得到一张基于点间距离的点云分布密度图,对于某一区域,就可以通过颜色值判断该区域DEM的可靠性强弱。这样设计人员也对设计成果的可靠性心中有数,对于可靠性弱的区域,重点在现场定位时进行复测,这样可以避免粗差,也可做到有的放矢,节约测量工作量。
4 实验与结论
2009年,安徽省电力设计院在220kV铜贵——永丰输电线路勘测设计中应用了机载激光雷达测量技术,本研究在该工程中进行了实验论证。
4.1 概况
220kV铜贵——永丰变输电线路全长155公里,途经皖南黄山地区,该区域地形复杂,植被覆盖十分密集。在该工程中,使用的激光扫描仪为徕卡公司的ALS50,搭载平台为国产运7小飞机,整条线路共布置了5个地面GPS基准站;设计飞行高度为800m,飞行速度为180km/h,扫描带宽为600m~800m,点密度为9~12点/m2;采用一定重叠度往返飞行的方式(见图1),航带旁向重叠度为60%,重叠区域的带宽达到400m以上,总带宽达到1km以上,将初选路径全部覆盖在内;数据处理过程中,各塔位人工干预的半径为100m;点云密度分布图的格网大小为5m,取点间距离小于5m、大于5m小于10m、大于10m这几种情况作为判断依据。

图1 多航带飞行
4.2 实验结果
图2为航带重叠区域的地面点,其中红色小点为一条航带获得的地面点,青色小点为另一条航带得到的地面点。可以明显的看出,双(多)航带飞行可以明显增加航带重叠区域的地面点。而足够数量的地面点可以保证DEM的精度和可靠性。
图2 其中红色小点为往飞得到的地面点,蓝色小点为返飞得到的地面点
图3是对某一塔位区域手工干预前和手工干预后的狄洛特三角网渲染后的一个效果对比图,可以明显地看出,图3(a)中的平滑情况完全不如图3(b),这表明在计算机自动分类的过程中,图3(a)中尚有大量的非地面点没有分离出去。因此人工干预是必要的,本工程设计的人工干预方法既保证了数据质量满足工程需要,也节约了大量的人工及时间。
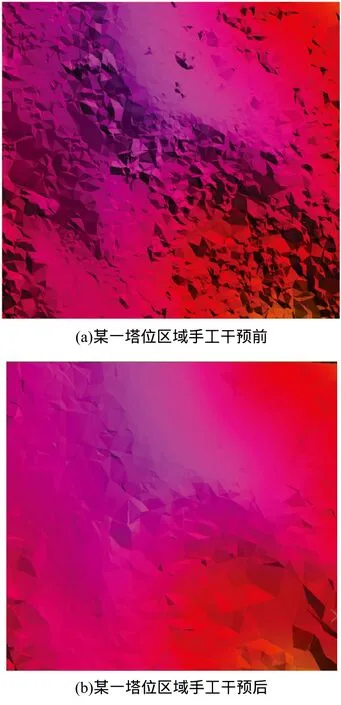
图3 某一塔位区域手工干预前和手工干预后的狄洛特三角网
图4为某一区域的点云分布密度图,其中白色表示该位置没有地面点,红色代表该位置地面点的点间距超过10m,青绿色代表该位置地面点的点间距大于5m小于10m,黄色代表该位置地面点的点间距小于5m。白色和红色区域如果刚好位于线路路径范围内,则需要外业定位时给予重点复测。点云密度图可以对机载激光雷达数据质量进行一个直观的判断,对粗差的探测起到指引作用。
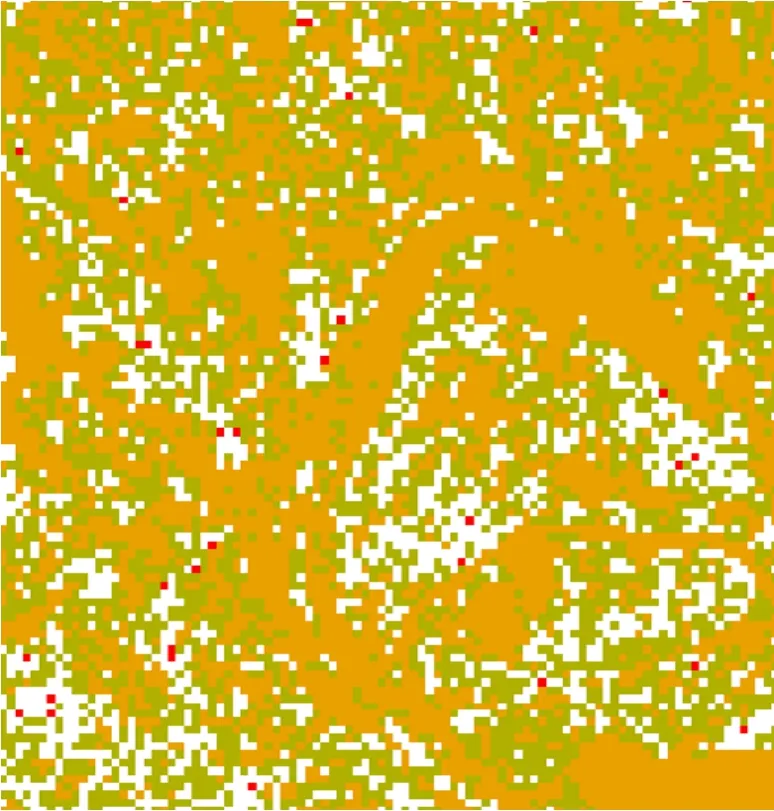
图4 点云密度分布图
为了检查DEM的精度,本研究在外业定位现场做了大量GPS控制点,将这些控制点的工测高与首次DEM高进行比较,其部分结果见表1。图5是要根据上表中检查点工测高与DEM高的差值生成的一张统计图,从图中可以看出绝大部分差值在-0.5m~0.5m之间,只有少数点的绝对差值超过2m。在进行人工干预后,所有检查点的绝对差值都在1m内。因此,DEM的总体精度情况是较好的,同时也证明特定区域的人工干预是必要的。
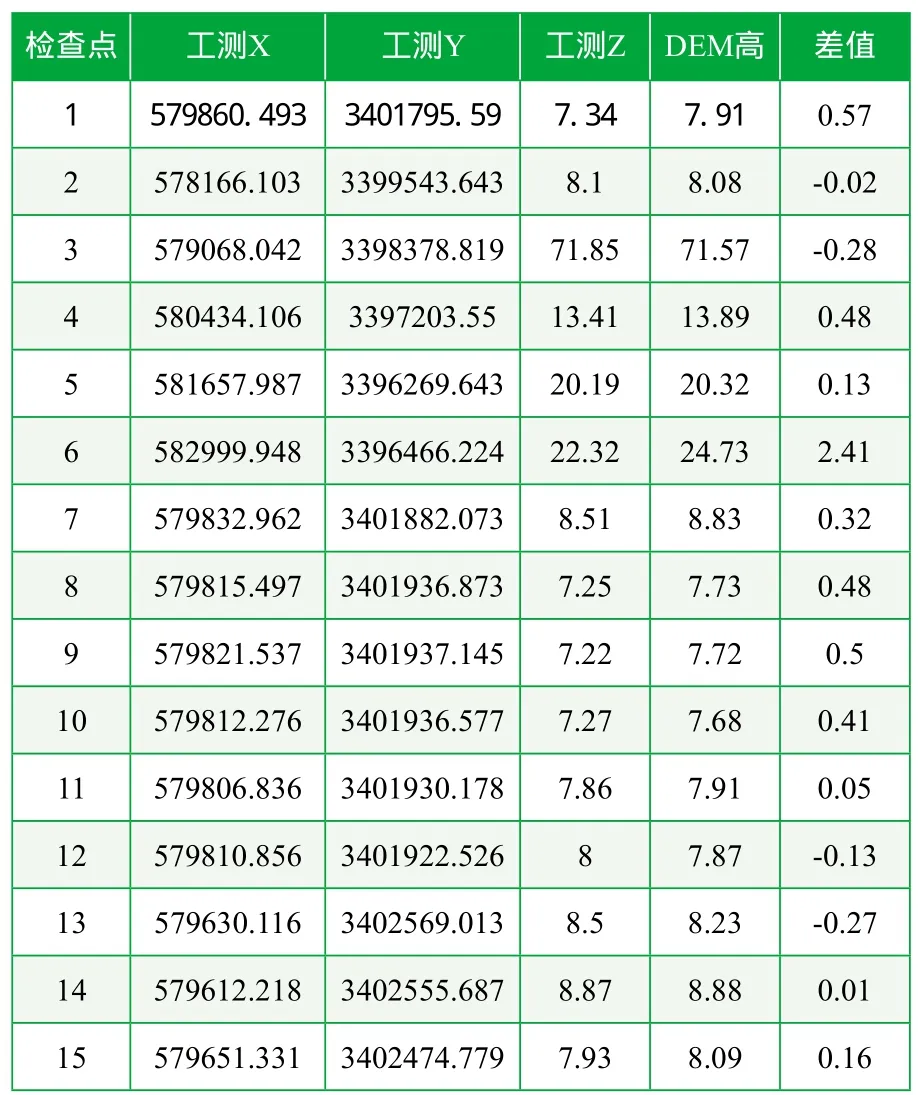
表1 工测高与DEM高比较(部分)
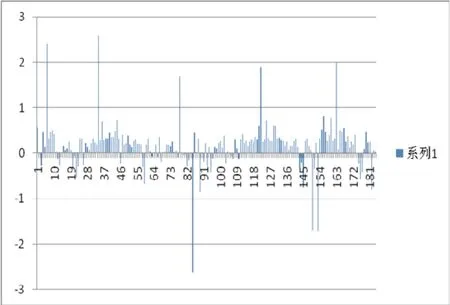
图5 DEM精度检查
5 总结
本研究对机载激光雷达数据采集与处理的一般流程进行了改进,提出了一种适用于山区的机载激光雷达数据采集与处理方法,主要作了如下改进:
(1)航飞设计的改进。本研究提出了一种双(多)航带飞行模式:一般地区采用重叠度60%的双航带飞行,特殊区段采用重叠度50%的三航带飞行,以确保重点关注区域有足够的点云密度。
(2)点云滤波人工干预的改进。提出二次精纠正的思路,首次采用计算机自动分类成果进行设计工作,二次根据排杆定位的成果,对所有的立塔点附近区域和危险点、关注点附近区域进行人工干预精纠正,以排除这些重点区域的分类误差。这样既保证了关注点的质量可靠,又大量节约了工作时间,提高效率。
(3)提出了一种DEM可靠性评价方法。为了评价DEM的可靠性,本研究提出:首先生成一幅基于地面点间距离的点云分布密度图,然后根据该图来判断某一区域DEM的可靠性强弱。
经实践证明,本研究中所提出的方法在线路路径优化中起到了重要的作用,估算节约总投资的5%;既加快了勘测设计进度,提高了作业效率,节约工期约30%,又从多方面确保了测量、设计成果的质量、可靠性,避免了设计差错、返工现象的出现。
[1]陈功,程正逢,石克勤等.激光雷达在电力线路工程勘测设计中的应用[J].电力勘测设计,2006,(5).
[2]徐祖舰,阳锋,黄勇等.三维激光雷达技术在电力行业中的应用[J].广东输电与变电技术,2008,(6).
[3]张煜,窦延娟,张晓东等.机载激光雷达数据采集及数据处理[J].长江科学院院报,2010,(1).
[4]张玉方,程新文,欧阳平等.机载LIDAR数据处理及其应用综述[J].工程地球物理学报,2008,(1).
[5]杨洪,兀伟,马聪丽等.机载LiDAR的特点及其用于西南高山峡谷地区大比例尺测绘工作的可行性探讨,四川测绘,2007,(2).
[6]黄励鑫,王丽园.机载激光雷达技术在困难复杂地区公路勘察设计中的应用[J].交通科技,2009,(1).
[7]大比例尺DEM生产过程中的粗差检测与质量控制的研究[J].现代测绘,2004,(03).
猜你喜欢
北京测绘(2022年5期)2022-11-22
河北地质(2022年2期)2022-08-22
汽车观察(2021年8期)2021-09-01
中国科学数据(中英文网络版)(2020年4期)2021-01-20
科学大众(2020年17期)2020-10-27
空间科学学报(2020年6期)2020-07-21
城市勘测(2019年4期)2019-09-05
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
现代园艺(2017年23期)2018-01-18