
基于自整定模糊PID控制算法的电液伺服系统设计
2012-09-29 05:57韩成浩赵丁选
制造业自动化 2012年7期
韩成浩,赵丁选
HAN Cheng-hao1,2, ZHAO Ding-xuan1
(1.吉林大学 机械科学与工程学院,长春 130022;2.吉林建筑工程学院 电气与电子信息工程学院,长春 130118)
0 引言
六自由度并联机器人具有结构简单、刚度好、定位精度高和动态响应快等优良特性,广泛应用于装配生产线、运动模拟再现、高精密机床、飞行模拟器、卫星天线换向装置等高精度和大载荷且工作空间较小的场合[1,2]。六自由度并联机器人控制系统属非线性和时变系统,其6个液压缸伺服子系统的准确和快速响应极为重要,采用传统PID控制算法往往难以满足控制精度要求。本文采用自整定模糊PID控制算法设计了模糊PID控制器,并对系统进行了Matlab仿真。结果表明本控制器具有响应速度快、鲁棒性强、精度高和无超调等特点,提高了六自由度并联机器人的整体控制性能。
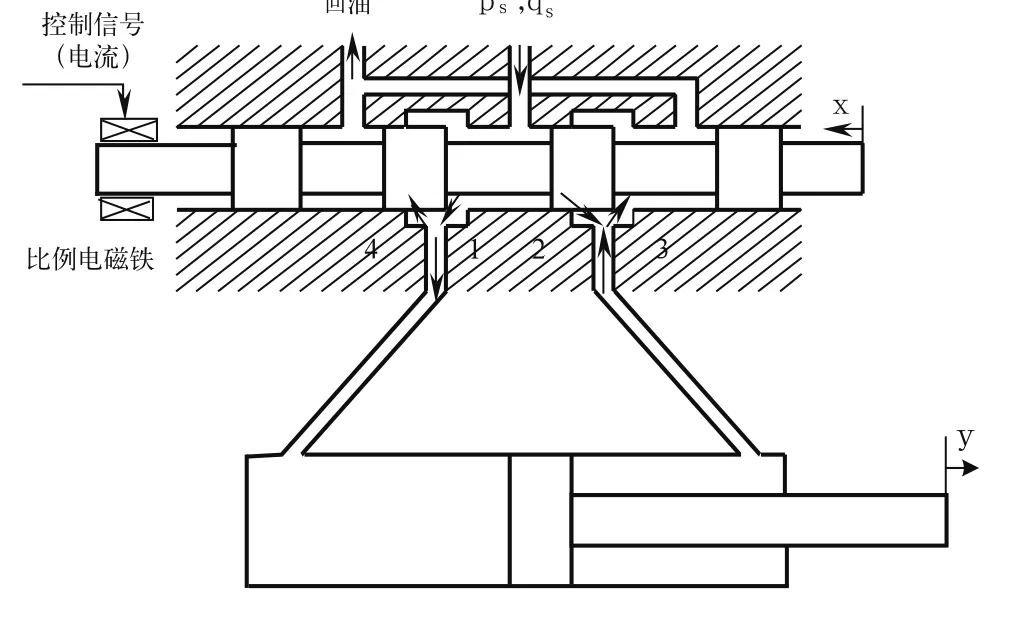
图1 单自由度电液伺服系统结构
1 单自由度电液伺服系统的传递函数
六自由度并联机器人控制系统由6个单自由度电液伺服系统组成,图1为单自由度电液伺服系统。系统主要由液压缸、电液比例位置控制和控制阀等组成。系统对用户给定的具体数据和位移传感器检测到的当前液压缸活塞位置进行比较,经PID控制算法自动调节比例电磁铁的电流,驱动比例调节阀,进行活塞杆伸缩量的准确控制。
因液压系统属非线性的系统,且活塞杆的运动摩擦力、比例阀的流量特性和阀开度的饱和特性等均属非线性。为了分析方便作如下处理:
1)设四通阀的重合量为零,各出口的流量系数一定;
2)设电磁阀的供油压力恒定,忽略系统的非定常流动;
3)设液压油的油温恒定;
4)作用于阀和液压缸上的摩擦力用粘性衰减力来替代;
5)设液压油流经控制窗口时产生压力损失;
6)忽略各种油泄漏。
根据上述假设,利用拉氏变换可推导出活塞杆的伸缩量和比例阀开启度大小的开环传递函数[3,4]Gc(s)。

式中:
ξh—控制阀液压相对阻尼系数,取0.2;ωh—活塞杆的振动频率,取186 rad/s;
K—开环放大倍数,取1.5。则系统的开环传递函数为:

2 模糊PID控制器设计
图2为模糊PID控制器结构,系统由给定输入端、当前活塞杆位置反馈通路、模糊决策控制和PID控制器组成。模糊PID控制技术的关键在于找出比例(P)、积分(I)和微分(D)这三个参数与误差量e和误差变化率ec之间的模糊关系,即根据实际经验整理出具体的模糊控制规则。所设计的模糊PID控制系统定时采集误差量e的数值和误差变化率ec的数值。然后由模糊控制器推理出具体输出控制量,并对P、I、D三个参数进行实时修改,实现目标的自适应精确控制 。图2中,r为用户给定值,y为液压缸活塞杆的伸缩长度。
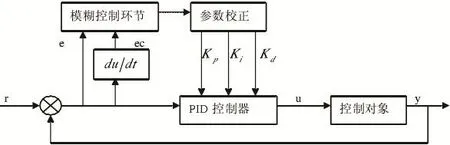
图2 模糊PID控制器结构
进行P、I、D三个参数在线自整定时,模糊PID控制器根据当前采集到的e和ec,经推理和解模糊方法计算出Kp、Ki、Kd三个输出量在其所属论域内的精确数值。之后乘以适当的比例因子QP、QI、Qd得出实际的修正数值。最后将这些整理出的实际修正数值代入公式(3)、(4)、(5)中得出控制系统的最佳PID参数[5,6]。
Kp= Kp’+KP×QP (3)Ki = Ki’+ Ki× QI (4)Kd= Kd’+Kd×Qd (5)式中的Kp’、Ki’、Kd’是PID参数初始值。
2.1 模糊控制器的结构设计
根据单自由度电液伺服系统的具体控制对象,将模糊控制器的总体结构设计为两输入、三输出方式。系统的模糊PID控制器结构如图3所示,误差量E和误差变化率EC设置为模糊控制器的输入变量,比例(P)、积分(I)、微分(D)三个参数的修正值KP、KI、KD设置为模糊控制器的输出变量。
2.2 输入和输出量的模糊化
2.2.1 给定语言变量
本系统的语言变量共有三个:1)误差输入语言变量E,设论域为A=[-1,+1];2)误差变化率输入语言变量EC,设论域为B=[-1,+1];3)P、I、D三个参数(Kp、Ki、Kd)的输出调整语言变量KP、KI、KD,设论域均为[-1,+1]。给定模糊变量E、EC、KP、KI、KD在其论域内的模糊集均为7个,即PB(正大)、PM(正中)、PS(正小)、ZE(零)、NS(负小)、NM(负中)、NB(负大)[7,8]。

图3 模糊控制系统结构图
2.2.2 建立隶属度函数
确定了论域和模糊集以后,要确定模糊语言变量的隶属度函数。系统的输入隶属度函数采用正态形,而输出隶属度函数采用两侧为半正态形、中间为三角形的结构。输入变量E和EC的隶属度函数曲线如图4和图5所示。输出变量KP、KI、KD的隶属度函数如图6、图7、图8所示。根据实际情况,对输入和输出变量的论域进行适当的调整。

图4 输入量E的隶属度函数
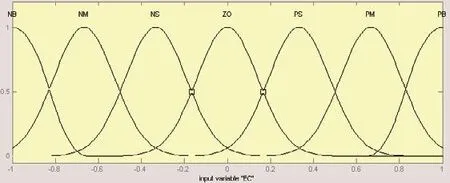
图5 输入量EC的隶属度函数
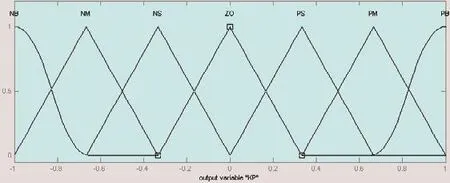
图6 输出量KP的隶属度函数

图7 输出量KI的隶属度函数
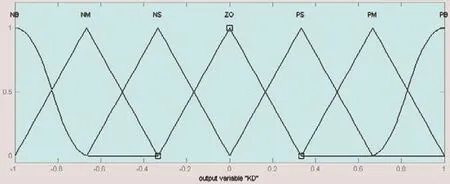
图8 输出量KD的隶属度函数
2.3 设计模糊控制规则
模糊控制规则的建立采用经验归纳法。KP、KI和KD自整定的模糊控制规则[9],见表1、2和3。
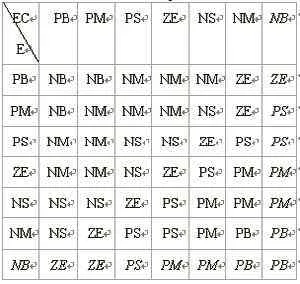
表1 KP模糊规则
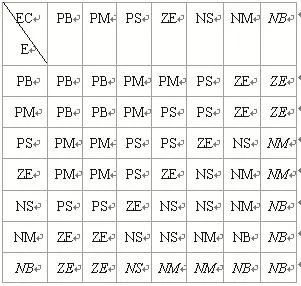
表2 KI模糊规则

表3 KD模糊规则
3 模糊PID控制器与普通PID控制器的Matlab仿真
在Matlab程序中的Simulink设计环境下调出相应的图形模块进行连接,仿真模糊PID控制器和普通PID控制器对上述开环传递函数的响应,图9为仿真模型设计图。
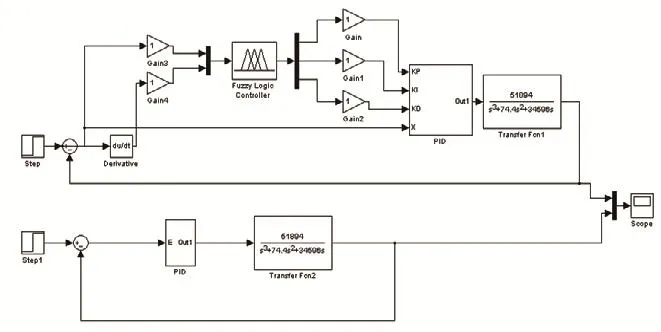
图9 模糊PID与普通PID的各模块连接图
图10为模糊PID控制器与普通PID控制器对阶跃信号的响应曲线图。从两个响应曲线中可看出,模糊PID控制器的响应时间非常快,达到稳态仅用了1.1s,且无超调,证明了自整定模糊PID控制算法明显优于普通PID控制算法。
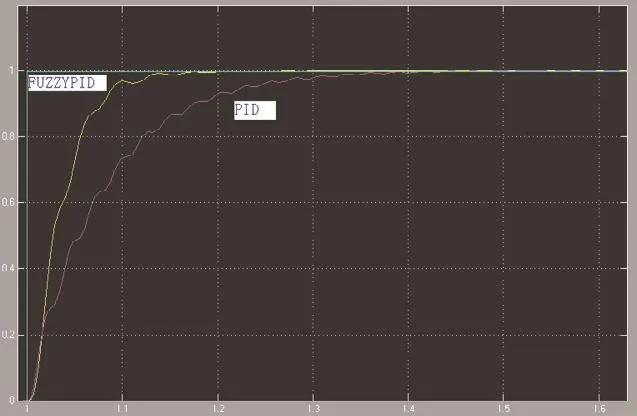
图10 模糊PID控制器与普通PID控制器的阶跃响应曲线图
4 结束语
针对采用传统PID控制器控制六自由度并联机器人时所存在的响应速度慢、控制精度不高和鲁棒性差等问题,利用自整定模糊PID控制算法设计了一种模糊PID控制器,并对单自由度液压伺服系统进行了Matlab仿真。结果表明所设计模糊PID控制器具有响应速度快、鲁棒性强、精度高和无超调等特点,提高了六自由度并联机器人的控制性能。
[1] 肖英奎.运动同步记录与在线模拟技术研究[D].长春:吉林大学,2005.
[2] 倪涛.有力觉及视觉临场感的遥操作机器人系统研究[D].长春:吉林大学,2006.
[3] Dingxuan Zhao,Hironao Yamada,Takayoshi MUTO,et al.6DOF presentation of realistic motion in operating a construction tele-robot system.Proceedings of the 5th JFPS International Symposium on Fluid Power,2002(2):507-512.
[4] Dingxuan Zhao,Yupeng Xia,Hironao Yamada,etal.Presentation of realistic motionto the operator in operating a teleoperated construction robot.Journal of Robotics and Mechatronics.2002,14(2):98-104.
[5] 诸静.模糊控制原理与应用[M].北京:机械工业出版社,2005.
[6] 楼顺天,胡昌华,等.基于MATLAB的系统分析与设计—模糊系统[M].西安:西安科技大学出版社,2001.
[7] 茅硕,何永勇.Fuzzy-PID设计及控制性能分析[J].中国惯性技术学报,2006,8(2):33-34.
[8] 陈杰,等.模糊控制的研究现状与展望[J].自动化与仪器仪表,2006,9(2):32-33.
[9] 丁曙光,卢检兵,等.基于高精度Fuzzy控制算法的校直机液压伺服系统的仿真与应用研究[J].重型机械,2007,15(2):23-25.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
计算机仿真(2022年2期)2022-03-15
哈尔滨工程大学学报(2021年7期)2021-07-13
化工管理(2021年7期)2021-05-13
成都信息工程大学学报(2021年6期)2021-02-12
装备制造技术(2020年3期)2020-12-25
计算机与数字工程(2019年8期)2019-09-03
制造技术与机床(2017年3期)2017-06-23
专用汽车(2016年4期)2016-03-01
北京航空航天大学学报(2016年4期)2016-02-27
