
基于Adams与Matlab的四旋翼飞行器控制仿真
2012-09-29 03:19:18胡锦添舒怀林
自动化与信息工程 2012年5期
胡锦添 舒怀林
(广州大学机械与电气工程学院)
0 前言
四旋翼飞行器是一种四螺旋桨驱动的、可垂直升降的飞行器,这种结构被广泛用于微小型无人飞行器的设计,具有重要的军用和民用价值。它同时也具有欠驱动、多变量、强耦合、非线性和不确定等复杂特性。近年来,随着新型材料、微机电、微惯导以及飞行控制等技术的进步,四旋翼飞行器得到了迅速发展,逐渐成为人们关注的焦点[1]。
Adams软件是美国MDI公司开发的虚拟样机分析软件,它使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,非常方便地对虚拟机械系统进行静力学、运动学和动力学分析,更具有开放性的程序结构和多种接口,方便进行二次开发。但是对于控制系统的设计,Adams只能处理一般的简单控制环节。相比之下,Matlab能够处理各种复杂的高级控制环节,如智能控制系统。如果能充分发挥两者的特点,结合在一起使用,这将给复杂机电系统的设计提供一种新方法[2-3]。
本文利用Adams软件和Matlab软件,对四旋翼飞行器及其控制系统进行联合仿真。利用Matlab/Simulink模块搭建了四旋翼飞行器控制系统的仿真平台,实现基于Matlab与Adams的四旋翼飞行器的联合动态仿真,避免了推导四旋翼飞行器的动力学方程的繁琐过程,提高了四旋翼飞行器设计效率。首先通过三维设计软件Solidworks建立四旋翼飞行器的实体模型,然后将其导入动力学仿真软件Adams中,通过Adams的接口模块Adams/control与Matlab进行数据交换,实现四旋翼飞行器运动学及动力学仿真。
1 四旋翼飞行器机械结构系统的建立
1.1 四旋翼飞行器三维结构模型的建立
尽管 Adams提供了丰富的建模工具,但直接在Adams中建模还是比较困难。大多数模型是由其它绘图软件绘制后再导入到 Adams中,本文选择Solidworks三维设计软件建立四旋翼飞行器结构模型。设计的四旋翼飞行器具有1个机架、4个电机和4个旋翼,能实现 10个自由度的回转运动和平移运动。其三维结构模型如图1所示。
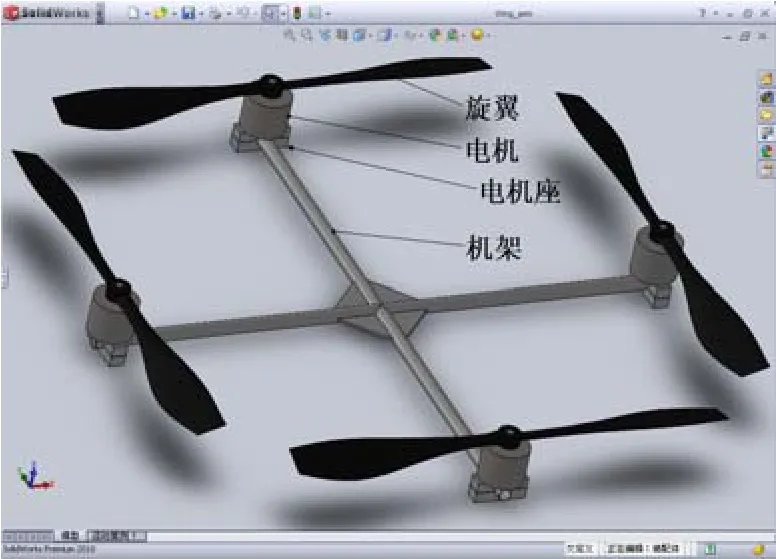
图1 四旋翼飞行器三维结构模型
1.2 四旋翼飞行器运动仿真系统的建立
将 Solidworks中创建的四旋翼飞行器结构模型导入到Adams中。首先把Solidworks中的模型文件保存为.X_T(Parasolid)格式,然后导入到Adams中。最后对每个零部件进行属性编辑,定义质量、材料、转动惯量等相关属性[4],经过处理后,虚拟样机便具有与真实样机相似的物理特性,可实现 Adams对四旋翼飞行器的运动学及动力学仿真,如图2所示。
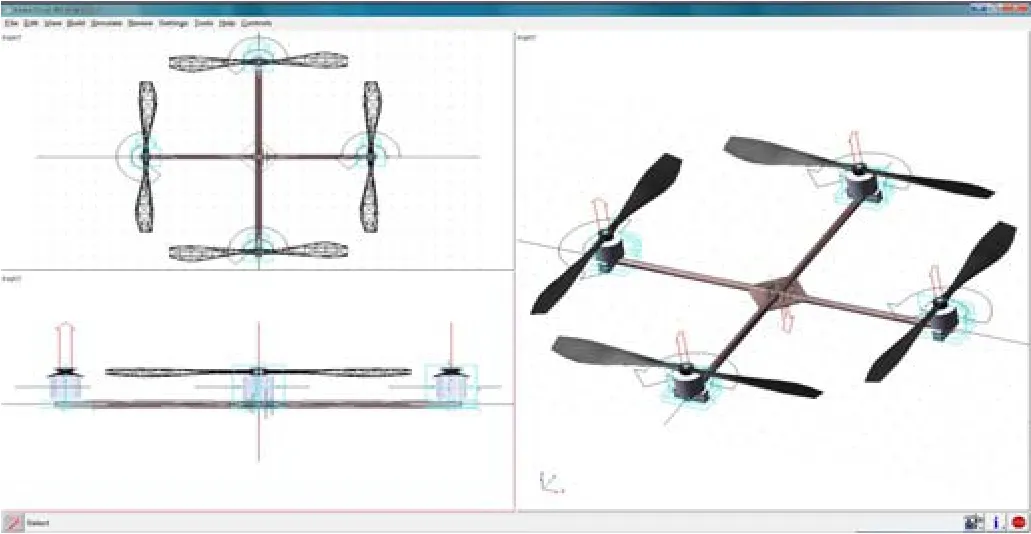
图2 定义约束后的四旋翼飞行器模型
为了更好地模拟实际系统,要为导入 Adams中的模型定义约束及驱动,包括在4个旋翼处及机架中心处分别定义旋转约束和球铰链约束,在其它没有相对运动的零件处定义固定约束[5]。这样可确定飞行器的各个零件之间的约束关系。同时,在4个旋翼处定义旋转驱动作为输入的驱动力矩。为简化仿真难度,忽略空气动力学等问题,把4个旋翼的升力简化为刚性作用力。4个旋翼作用力和力矩可以通过人为设定,或将旋翼的转速通过函数转换得到,如表1所示。

表1 旋翼输入转速与作用力的转换
2 虚拟样机飞行控制系统
四旋翼飞行器的每个旋翼都由一个直流无刷电机驱动,电机由配套的直流调速器控制,直流调速器的指令由姿态控制器给出。整个四旋翼飞行器控制系统就是一个多输入多输出、强耦合的复杂机电系统。
4个电机并行连接,构成同步驱动系统,通过高速I2C串行总线把转速指令从姿态控制器传送给各个直流电机调速系统,控制直流无刷电机驱动相应的旋翼;同时,通过三轴陀螺仪与三轴加速度传感器进行姿态信号反馈,实现全闭环姿态控制。系统总体控制结构如图3所示。
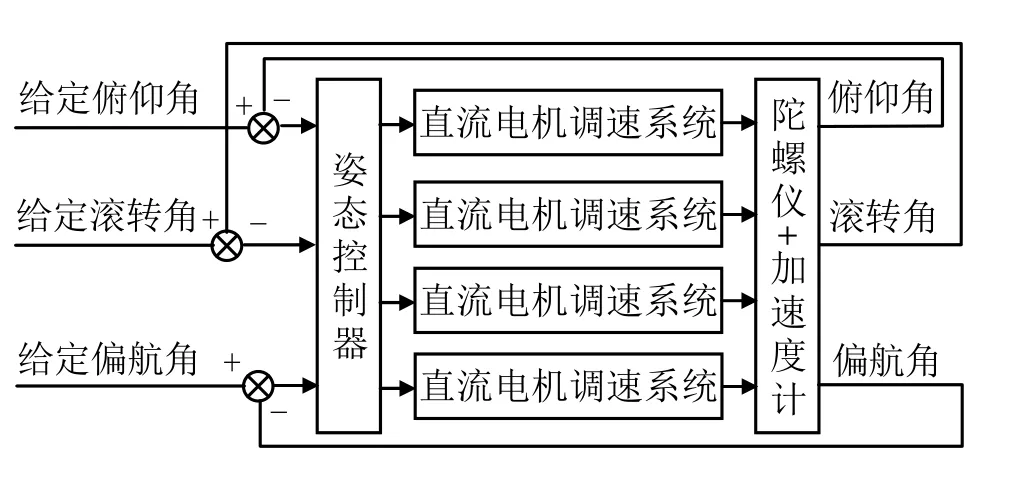
图3 四旋翼飞行器控制结构
3 联合仿真整体系统的建立
3.1 联合仿真系统机械子系统的建立
要实现机械系统与控制系统的联合仿真,必须先把 Adams中建立的四旋翼飞行器机械子系统导入到Matlab,然后在 Matlab/Simulink中搭建联合仿真系统。
使用Adams中的Adams/control模块,设置参数后便自动生成相关文件[6]。通过该模块可实现Adams与 Matlab之间的数据传递。同时,要实现机械系统与控制系统之间的参数传递,需要设置参数变量,在Adams中创建7个状态变量,包括4个控制转速变量及3个欧拉角变量,如表2所示。

表2 Adams中设置的变量

Adams可实时地调用控制系统输出的转速变量值,并将其作为该时刻的旋翼转速值;同时,四旋翼飞行器的各个欧拉角变量值又可实时地反馈到控制系统中,如图4所示,从而构成闭环姿态控制系统,实现精确控制。
在Adams中,定义输入与输出变量,4个旋翼的转速定义为输入变量,存放 Matlab控制系统输出的转速值;欧拉角定义为输出变量,作为角度反馈输入到控制系统。此后,Adams/control模块将生成三个文件[7],用于 Adams与 Matlab之间的数据传递。在Matlab的命令行中调用Adams/control模块,即可显示联合仿真系统的7个变量。在Matlab的命令行中输入命令:adams_sys,即可产生四旋翼飞行器机械子系统模块,如图5所示。

图5 联合仿真系统的机械子系统
图5仿真系统所示:机械子系统Adams有4个转速变量作为输入,3个角度变量作为输出。
3.2 联合仿真姿态控制系统的建立
四旋翼飞行器系统是一个多变量强耦合的机电系统,在进行联合仿真时将其简化为线性多变量解耦系统。分别对各个欧拉角,采用PID控制策略进行控制,通过对各个旋翼转速的控制,实现对整个四旋翼飞行器的姿态控制,使得四旋翼飞行器能够实现精确的姿态跟踪。为简化控制系统,本文只对俯仰角与滚转角进行控制。4个直流电机调速控制系统(BLDC)同时输入恒定的6V电压值,使四旋翼飞行器保持在平稳的水平飞行状态,分别在BLDC1与BLDC4的前向通道加入 PID控制器并把俯仰角与滚转角作为反馈输入,以此组成姿态闭环控制。利用试凑法整定PID 参数如下:PID Controller1:KP=4.1,KI=20,KD=1.05;PID Controller2:KP=3.9,KI=22.3,KD=1.14。联合仿真姿态控制系统如图6所示。

图6 联合仿真姿态控制系统
4 联合仿真系统实验
为了对四旋翼飞行器联合仿真系统的性能进行验证,独立控制俯仰角及滚转角,即分别控制X轴及Y轴上的其中一个旋翼的转速,两个旋翼同时输入阶跃信号或正弦信号,以便测试系统的响应特性及跟踪特性,如图7、图8所示。

图7 阶跃响应特性曲线
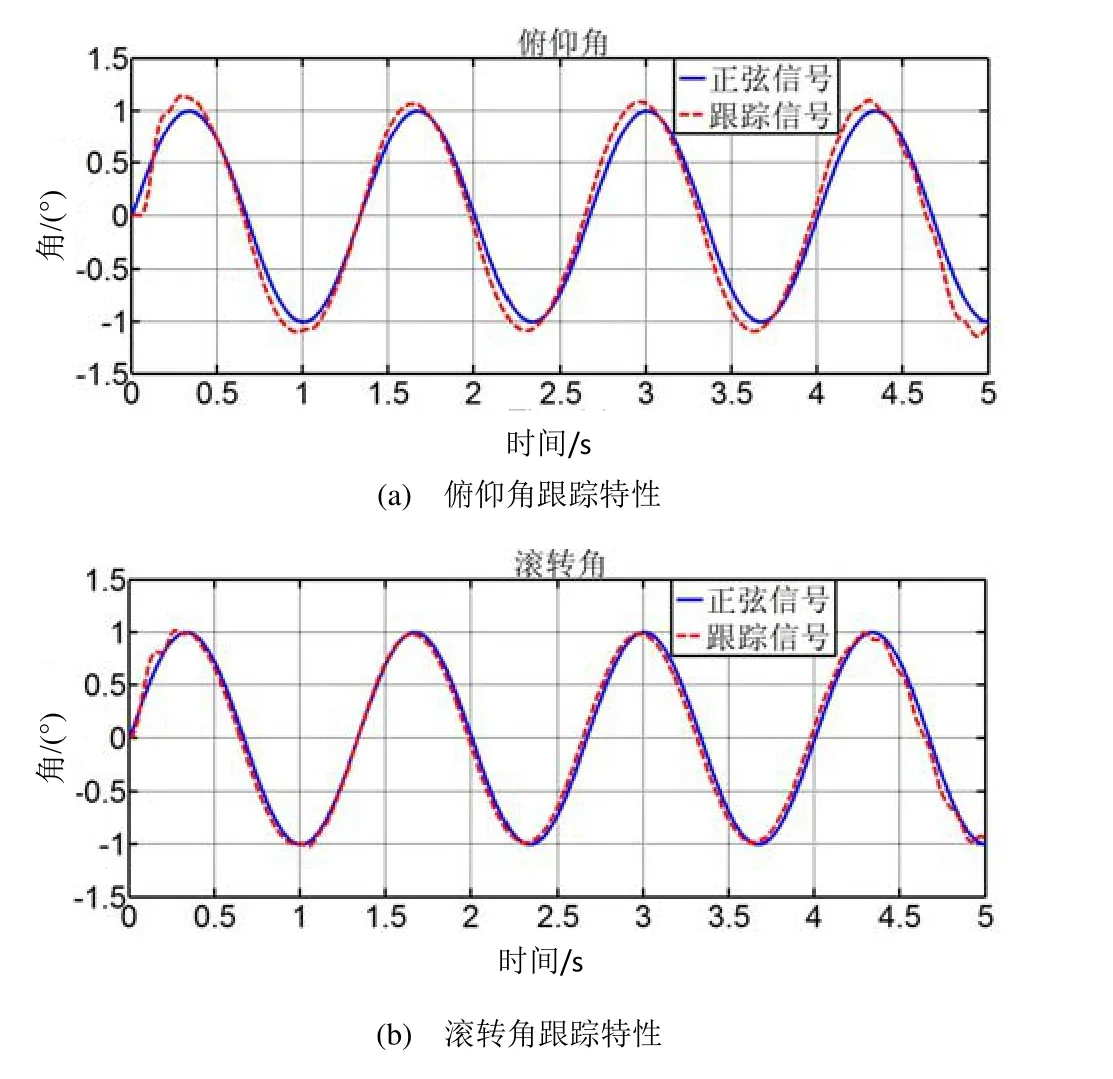
图8 跟踪特性曲线
从仿真分析可以看出,当输入信号为阶跃信号时,四旋翼飞行器在较短的响应时间内,超调量小,能够从当前飞行姿态迅速稳定地调整到指定的飞行姿态,实现对飞行姿态的快速、精确控制。同时在Adams的仿真动画中可以看出,四旋翼飞行器由初始姿态迅速倾转到指令给定的姿态,并稳定地保持该姿态不变。当输入信号为正弦信号时,四旋翼飞行器可以精确地跟踪给定的正弦指令。由此可以说明设计的姿态控制器可以很好地控制四旋翼飞行器跟踪给定的姿态变换,使其具有较好的跟踪特性。
5 结论
利用联合仿真系统,可以快速地建立四旋翼飞行器的机械模型与控制系统模型,避免了繁琐的动力学方程推导过程,降低了设计难度,节省了开发时间。综合应用Solidworks、Matlab、Adams三个软件的特点,建立了四旋翼飞行器的机械系统与控制系统,并能同时验证两个系统的有效性。这种设计方法对于机电一体化产品的设计显得非常重要,它保证了机械设计人员与控制系统设计人员能共享同一个数据模型,避免了模型数据的冗余与数据更改的不同步,使产品设计更高效,更高质。通过仿真,验证了四旋翼飞行器姿态控制器的良好控制效果,仿真过程得到的大量设计参数,可帮助物理样机与控制系统的改进;通过对设计参数的详细分析,对各个机械零件及控制算法进行优化,以便得出较优的设计方案。
在后续的研究中,将深入探讨低雷诺数条件下旋翼空气动力学问题[8],使建立机械系统的模拟环境与实际环境更接近。同时,在Matlab/Simulink建立的控制系统中加入智能控制模块,使四旋翼飞行器的姿态控制更快速,更精确,更稳定。
[1] 李占科,宋笔锋,宋海龙.微型飞行器的研究现状及其关键技术[J].飞行力学,2003,21(4):1-4.
[2] 何亚银.基于 ADAMS和 MATLAB的动力学联合仿真[J].现代机械,2007(5):60-61.
[3] 龚建球,刘守斌.基于Adams和Matlab的自平衡机器人仿真[J].机电工程,2008,25(2):8-10.
[4] MSC Software 公司. Adams 2003/Tire user’s manual[EB/OL].[2002-12-23]. http: // www. mscsoftware. com.
[5] 李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2006.
[6] 陈立平,张云清.机械系统动力学分析及 ADAMS应用教程[M].北京:清华大学出版社,2005:101-132.
[7] 王涛,张会明.基于ADAMS和MATLAB的联合控制系统的仿真[J].机械工程与自动化, 2005(3): 79-81.
[8] 胡宇群.微型飞行器中的若干动力学问题研究[D].南京:南京航空航天大学,2002.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
装备制造技术(2021年1期)2021-05-21 07:54:44
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
电子制作(2019年9期)2019-05-30 09:41:48
自动化学报(2018年2期)2018-04-12 05:46:05
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
浙江大学学报(工学版)(2016年2期)2016-06-05 09:20:51
现代工业经济和信息化(2016年5期)2016-05-17 05:35:56
通信电源技术(2016年4期)2016-04-04 02:57:36
国外科技新书评介(2015年3期)2015-05-28 10:38:04
