
基于参考模型的珩磨机往复位置自适应控制
2012-09-28 13:18周耿烈胡赤兵陈杉杉赵家黎
制造技术与机床 2012年4期
周耿烈 胡赤兵 陈杉杉 赵家黎
(兰州理工大学机电工程学院,甘肃兰州 730050)
1 珩磨机主轴往复自适应控制原理
珩磨机作为金属加工生产中的重要设备,开始向重切削、粗加工方向扩展,这带动了珩磨加工速度的提高,对控制系统提出了更高的要求[1-2]。珩磨机往复换向位置控制作为珩磨机控制的关键环节,直接影响到珩磨机的能力和质量[3]。传统的珩磨机主轴往复换向大多采用一般的反馈控制,往复速度变化使换向速度慢,不能满足目前的主轴往复运动高速度、高加速度及高换向精度的要求。而参考模型自适应控制(MRAC)是解决这一问题的有效手段,根据被控对象的实际输出与参考模型的输出之差的某个函数准则来修正控制器参数,力图使被控对象的实际输出与参考模型的输出之间的广义误差向量e趋于零,使系统达到或接近所期望的动态行为[5-6],从而实现主轴往复运动高速度、高加速度和高换向精度的驱动与控制。
2 高速数控珩磨机往复运动建模[7]
图1为珩磨机往复运动位置控制系统结构图,该系统由指令位置电位器、反馈位置电位器、电子放大器、电液伺服阀、液压缸和珩磨头组成。珩磨头的位置按照指令位置电位器给定的规律变化,将滑臂的位置指令Xi转换成指令电压Ui,被控制的珩磨头位置Xp由反馈电位器检测转换为电压Up,从而得偏差电压Ue=Ui-Up=K(Xi-Xp),K=U/X0为电位器的增益,经放大器放大,把误差信号加给伺服阀,调节阀芯的开口大小来控制液压阀的往复运动速度,从而确定上下换向点的位置,使液压缸的输出位置信号与指令位置信号相一致,保证换向精度。

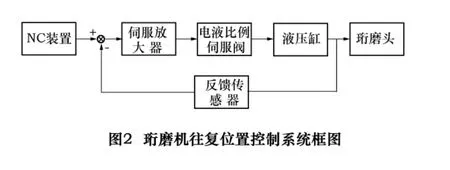
由此得出珩磨机的往复位置控制系统的工作方块图。图2中执行器的输出由反馈传感器连续测量,并与指令输入信号进行比较。两者之差即误差信号被放大器放大,产生的信号加给伺服阀,使执行器产生纠正动作。
(1)电液伺服阀
其作用是利用电气信号控制液压的输出(压力和流量)。一般视为一个振荡环节,其数学模型为

其中:ωv为伺服阀固有频率;ξv为伺服阀阻尼系数;ksv为伺服阀的静态流量增益;Qv为伺服阀的额定流量;In为伺服阀的额定输入电流。
(2)液压缸及惯性负载珩磨头
液压缸可以视为一个积分加二阶振荡环节,其数学模型为

(3)反馈传感器
其作用是把执行器输出的位移信号转换成可以与指令信号相比较的反馈信号。一般将反馈传感器视为一个比例环节

式中:Uf为位移反馈信号;Kf为传感器位移/电压转换系数;x为油缸的输出位移。
(4)伺服放大器
伺服放大器由加法器和信号放大器组成。一般视为一个比例环节。其数学模型为


式中:I为放大器的输出电流;Ka为伺服放大器增益;U为输入的电压信号。
由式(1)~(4)可以得到珩磨头向下运动伺服阀控制液压缸位置控制系统的方块图(如图3)。从而得出珩磨头往复位置控制系统开环传递函数为

闭环传递函数为:

根据制造厂家提供的电液伺服阀的参数可知:伺服阀固有频率ωv=500 rad/s,伺服阀阻尼系数ξv=0.85,额定流量Qv=80 L/min,额定压力Ps=6.3 MPa。由此可得伺服阀的静态流量放大系数为:ksv=Qv/In=4 444(cm3/s)/A。对于本项目研究的液压缸固有频率ωh=544.7 rad/s,液压缸阻尼系数 ξh=0.15,有效作用面积A=24.63 cm2,可得液压缸增益kh=1/A=1/24.63=0.040 6/cm2。由于采用光栅尺作为位置反馈元件,反馈元件输入到控制器的信号是脉冲信号,故在反馈传感器的比例系数为:Kf=1 V/mm。根据劳斯-霍尔维茨稳定判别条件:2ξhωh=0.3ωh,Kv=KaksvkhKf,代入各值,有Kv=Ka×4 444×0.040 6×1=180.43Karad/s。Kv应小于2ξhωh即Kv<0.3ωh,取:Kv=0.25ωh=136.2 rad/s有:Ka=0.755 A/V。
珩磨头往复位置控制系统闭环传递函数为

代入各值得:

参考模型决定着整个自适应控制系统的性能,当参考模型参数与系统参数越接近,则系统输出响应与参考模型的伴随性就越好,系统输出的超调量和调节时间等动态性能指标也与参考模型越接近。同时中和积分环节的调节作用,参考模型的固有频率选的略大于系统的固有频率,同时为了减小超调量应减小比例系数[8-10]。由于伺服放大器增益Ka对系统控制性能影响较大,因此分析不同Ka对系统的影响。图4为分别取Ka=0.755 A/V,Ka=0.600 A/V,Ka=0.500 A/V,Ka=0.400 A/V时的单位阶跃响应曲线。
由图4可以看出当Ka=0.500 A/V时,控制系统没有超调,并且响应快。当再减小Ka时,虽然没有超调,但响应速度变慢。因此把Ka=0.500 A/V作为参考模型的放大器增益,从而得出参考模型闭环传递函数为


3 模型参考自适应控制模型
图5为模型参考自适应控制系统框图,当参考输入u(t)同时加到系统和参考模型的入口时,系统的输出响应yt(t)与模型的输出响应ym(t)产生偏差信号e(t),由e(t)驱动自适应机构,产生适当的调节作用,直接改变控制器的参数,从而使系统的输出yt(t)逐步地与参考模型输出ym(t)接近,直到yt(t)=ym(t),e(t)=0为止,自适应参数调整过程也就自动终止。当对象特性在运行过程中发生了变化时,控制器参数的自适应调整过程与上述过程完全一样,使被控过程的响应特性与参考模型的动态性能一致。

根据前面对往复系统的建模,其可调系统动态方程如式(10),参考模型动态方程如式(11)。


由方程式(10)和(11)得该系统的广义误差方程为

式中:δi=ami-api,σ =bmi-bpi。
把式(12)写成向量微分的形式

为用李雅普诺夫稳定性理论设计自适应规律,选如下形式的李雅普诺夫函数:

式中:P为对称正定矩阵;Λ为对角正定矩阵。即

将式(12)形式的误差方程改写成向量微分方程的形式:

取V对时间的导数,则有

为使V为负定的,选Q为对称正定矩阵,并使

同时,使式(15)中等式右边的第2项恒为零,即得自适应规律为

从而可以得到可调系统中f0、f1、f2、f3、f4和kc的自适应规律为

为了便于计算取对角矩阵Λ和正定对称矩阵分别为


利用Simulink对系统进行仿真,其结果如图6。受到扰动时实际系统Ka的值可能发生变化,从而影响控制系统的性能。但采用模型参考自适应控制时可以根据系统的输出响应yt(t)与模型的输出响应ym(t)产生偏差信号e(t),由e(t)驱动自适应机构,产生适当的调节作用,补偿扰动的影响。图6是分别取伺服放大器增益Ka=0.755 A/V和Ka=1 A/V时的阶跃曲线。
从图6中可以看出采用模型参考自适应控制能使系统和理想参考模型一致同时没有超调,调整时间大约为0.050 s,可以满足珩磨控制系统快速性的要求。同时在出现扰动使Ka发生变化时仍能和参考模型的输出一致。
4 结语
(1)采用参考模型自适应控制能使被控过程的响应特性与参考模型的动态性能一致。
(2)在外界干扰的情况下,仍能和理想的参考模型一致,具有一定的抗干扰能力,并且调整速度快,可以满足系统快速性的要求。
[1]吴建民.数控珩磨机关键技术研究[D].甘肃:兰州理工大学,2005.
[2]来福兵.高速数控珩磨机控制系统研究[D].甘肃:兰州理工大学,2006.
[3]张云电.现代珩磨技术[M].北京:科学出版社,2007.
[4]Hosseini-Suny K,Momeni H,Janabi-Sharifi F.A modified adaptive controller design for teleoperation systems[J].Robotics and Autonomous Systems,2010,58(5):676 -683.
[5]陈复扬,姜斌.自适应控制与应用[M].北京:国防工业出版社,2009.
[6]LIU Yung-Tien,CHANG Kuo-Ming,LI Wen-Zen.Model reference adaptive control for a piezo - position system[J].Precision Engineering,2010,34(1):62 -69.
[7]马志宏,胡赤兵,吴建民,等.基于模糊控制的珩磨机伺服系统位置控制[J].兰州理工大学学报,2006,32(5):59 -61.
[8]王丽艳,金志立,曹泛.模型参考自适应控制中参考模型的选取方法[J].北京理工大学学报,1995,15(4):415 -418.
[9]SUN Jing.A modified model reference adaptive control scheme for improved transient performance[J].IEEE trans on Automatic Control,1993,38(8):1255 -1264.
[10]Feuer Arie.Integral action on robust adaptive control[J].IEEE Trans on Automatic Control,1989,34(10):1082 -1085.
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
自动化学报(2019年6期)2019-07-23
自动化学报(2019年6期)2019-07-23
World Journal of Hepatology(2019年5期)2019-06-20
中国教育信息化·基础教育(2016年12期)2017-04-15
自动化学报(2017年11期)2017-04-04
中国信息技术教育(2016年23期)2017-01-03
军事运筹与系统工程(2016年3期)2016-09-26
科教导刊·电子版(2016年21期)2016-08-23
电脑知识与技术(2016年10期)2016-06-16
