智能墙体抹灰机研究
2012-09-25 07:36:04刘维忠谢守勇王靖
重庆建筑 2012年4期
刘维忠,谢守勇,王靖
(1重庆建工集团总工办 重庆 401122 2西南大学工程技术学院 重庆 400716)
1 引言
随着建筑商品化的发展,加快施工进度,缩短工程周期,提高投资效益,已成为建筑商品化的中心环节。在建筑施工中,建筑墙体抹灰工程不仅工程量大,占用劳动力多,而且机械化程度最低,严重影响了工程工期。为降低劳动强度,节省工期,智能墙体抹灰机械在建筑业存在极大的需求空间。目前市场上已有一些墙体抹灰机械,但不能实现自动抹灰、找平等功能,存在着大量的问题,为此对墙体智能抹灰机械进行研究很有必要。
2 墙体抹灰机械的现状及存在问题
2.1 墙体抹灰机械的研究现状
目前,国内对墙体抹灰机械研究较多,而且有一些产品。这些产品中有采用液压调整装置,对升降和抹灰力度进行调整的[1];也有采用气动装置,实现抹灰机升降的[2];还有采用遥控方式对抹灰机的行走、升降等进行控制的[3]。国外对抹灰机研究成果也有一些,如加拿大、美国、英国等,有的采用砂浆喷射方式进行抹灰,有的也是采用液压或气动方式进行升降、行走等运动。
2.2 墙体抹灰机械存在的问题
纵观国内外抹灰机研究现状,目前抹灰机存在如下一些问题:
(1)大面积抹灰适用,局部抹灰欠缺
目前的抹灰机对厂房大面积抹灰比较适用,比人工抹灰速度快10多倍,可大大降低劳动强度,提高工作成效。但是,对于一些细部,如阴角、阳角、墙裙等由于机构原因,很难进行抹灰,因此这些部位还需要人工进行补灰,有的还得需要搭设脚手架等工序,造成生产效率降低。
(2)前后次抹灰衔接处理不足
现在的抹灰机在进行墙面抹灰时,是分次平移进行,即前一次上下抹灰完成,再左右平移一定距离进行下一次上下抹灰,在两次抹灰交替处会出现抹灰间隙和抹灰重叠现象,目前采用人工补抹方式进行处理,降低了劳动效率。
(3)机构传动方式问题
目前,抹灰机在机械结构传动方式上普遍采用液压和气动方式,液压传动装置结构复杂,要求加工精度较高,体积较大,而且在使用过程中,对环境要求较严,维护工作量较大,气动方式附属设备较多,因此给抹灰机的推广使用带来了一定的困难和限制。
(4)机械行走控制方式问题
抹灰机的行走是一个非常关键的运动,直接关系到抹灰的质量和效率,但是在现有的一些抹灰机中,其行走采用轨道式和人工推移方式。轨道式移动,需要安装轨道,造成额外的辅助工作量;人工推移方式不能很好地保证抹灰机行走的直线性,对抹灰质量中的平整性具有较大影响,这也是造成抹灰机不能很好推广的原因之一。
3 智能墙体抹灰机研究
3.1 智能墙体抹灰机需要实现的目标
通过工程调研发现,要实现建筑墙面的智能抹灰,抹灰机设计必须科学合理、运作高效,所设计出来的智能抹灰机械必须实现以下功能:可自动上灰、自动升降、厚薄可调,使操作后的墙面垂直度、平整度、光洁度均可达施工质量验收标准。抹灰机要节约劳动力、提高效率,必须克服传统抹灰作业墙面找平、贴饼、补空、填平、刮去多余部分、回收落地灰、搭架子、苦脏累等不利因素的影响。为提高工效,节约劳动力,抹灰机不仅要体积小、重量轻,还要便于操作、使用安全,拆装方便。只有做到省力、省工、省料,施工质量好且投资少,抹灰机才适合在建筑业推广使用。
3.2 墙体智能抹灰的研究
要实现墙体智能抹灰的目标,必须对抹灰机械的抹灰机构、进料装置、行走装置、控制系统等进行研究[4]。
(1)抹灰机构研究
抹灰机就是将水泥砂浆经过一定的压力涂抹在墙上,其中大面积抹灰比较容易实现,对于一些特殊部位,如阴角、阳角以及墙裙等部位采用机械抹灰实现起来较为困难。因此需要对抹灰机构进行研究,旨在研究出一种能够满足多种部位抹灰需要的功能。本项目研究具体就是将原来平板式的抹灰板设计成自由组合式、带有伸缩功能的抹灰机构,以实现阳角、阴角以及墙裙抹灰。
(2)抹灰厚度和平整检测研究
抹灰厚度关系到抹灰质量,因此本项目研究针对抹灰厚度可调性进行研究,对抹灰时的正压力进行在线调整,以实现抹灰厚度的调整和增加水泥砂浆在墙上的附着力。由于抹灰厚度对抹灰层的平整性具有一定的作用,因此在抹灰过程中需要对抹灰层的平整性进行检测。本项目在对抹灰层的厚度以及平整性检测方面均采用无损检测模式,即利用超声波检测技术实现厚度检测和利用机器视觉技术实现平整性检测,提高检测速度和检测精度,以提高抹灰速度和质量。
(3)进料装置研究
针对现有抹灰机进料采用一次性进料方式,而使得机械设备结构过于笨重的问题,本项目对进料装置进行研究,拟采用快速离散进料、二次涂抹方式,以降低机器重量。具体就是采用斗式间歇式提升,将水泥砂浆提升到抹灰装置,抹灰装置中的砂浆在两个涂抹机构的分次交替作用下,将砂浆涂抹到相应的墙面上,并且通过两次交替涂抹使抹灰层的光洁度和平整性得到提高。
(4)行走装置研究
根据抹灰场所环境条件,进行参照物选取,采用传感器进行检测,确定行走路线,保证行走路线为直线或者特定的曲线。整个行走装置采用自行走方式,无需导轨,可以进行人工干预和控制。
(5)控制系统研究
为了实现本研究项目中的抹灰机具有一定智能,能够进行学习和训练功能,本项目需对抹灰机的控制系统进行研究。其控制系统研究分为硬件研究和软件研究,硬件采用ARM9处理芯片,可以实现数据采集与处理;软件采用嵌入式控制系统。通过硬件和软件的有机结合实现对抹灰层厚度检测、平整度检测、行走路线确定、以及进料、提升、涂抹等功能,做到具有较好的人机界面和操作简单方便。
3.3 墙体智能抹灰机的设计
为满足墙体智能抹灰,按照智能抹灰的目标,设计了墙体智能抹灰机(图1),这款机械由:灰浆推进装置 、刮板装置、稳定装置、升降装置、高度调节装置和支撑加强装置等六部分组成。其中灰浆推进装置采用了简单的推进方式,即直接将电机的旋转运动通过钢丝绳转化为直线运动,驱动推板运动将灰浆箱中的灰浆推送至刮板口再由刮板完成抹灰的任务。而刮板采用了柔性设计,这样利于钢板自身的柔性自动调节压力,不仅能保证抹灰质量,同时还能使抹灰平面光洁,无需二次处理。通过步进电机带动钢丝绳运动,从而牵引刮板运动。在装置上设置了螺旋机构并通过步进电机直接驱动,不仅满足了刮板的运动需要,提高了整体的稳定性。同时在实际操作中还能在不改变抹灰机整体位置的前提下,调节抹灰厚度。
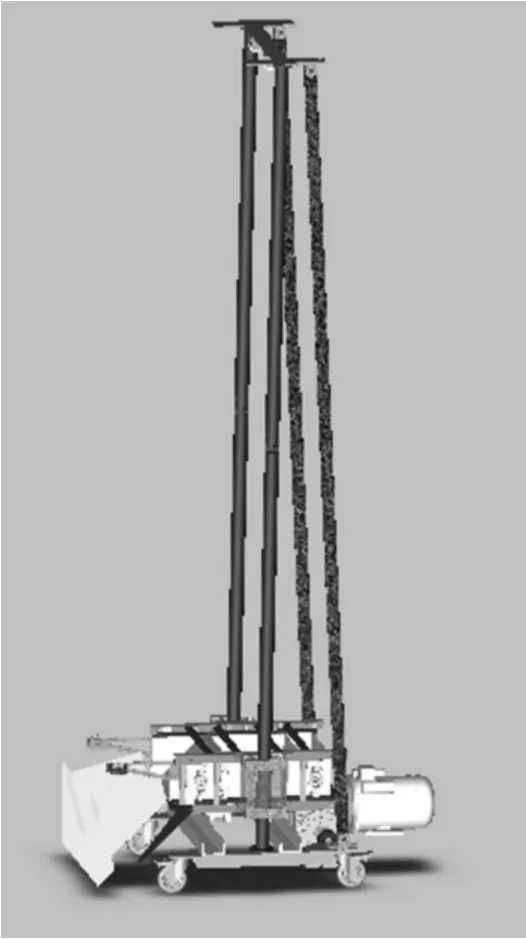
图1 智能墙体抹灰机
4 结语
本文针对目前抹灰机存在的问题,进行了一种智能的建筑墙面抹灰机研究,使该机械不仅具有自动实现抹灰工艺的功能,且在该机械的设计中,拟通过全电子操作实现机械的智能化,解决墙壁、墙裙、边角的抹灰问题,实现无落地灰、不需脚手架的墙面抹灰,保证抹灰砂浆的物理力学性能,达到方便、灵活,提高工作效率,降低综合成本和操作工人的劳动强度的最终目的。
[1]薛奎.新型半自动多功能抹灰机[J].建筑机械化.2002(04)
[2]张金誉.机械抹灰及施工工艺[J].建筑机械.1995(02)
[3]杨振宇,巩传根,刘芝霞,武爱华.新型抹灰机的设计[J].建筑机械.2008(15)
[4]薛奎,桑吉旺.抹灰机的结构设计[J].建筑机械.2001(10)
猜你喜欢
建材发展导向(2022年3期)2022-04-19 12:51:14
科学家(2022年3期)2022-04-11 23:55:49
机械管理开发(2022年1期)2022-03-24 06:46:28
云南化工(2021年6期)2021-12-21 07:31:18
建材发展导向(2021年19期)2021-12-06 03:20:24
建材发展导向(2021年13期)2021-07-28 07:15:36
建材发展导向(2021年9期)2021-07-16 07:11:04
建材发展导向(2021年6期)2021-06-09 05:56:48
矿山机械(2021年3期)2021-03-25 07:12:34
经济技术协作信息(2018年28期)2018-11-22 05:27:06