视觉测量中多光学靶点亮度自适应控制※*
2012-09-25 03:00李铁林张丽艳杨博文叶南
单片机与嵌入式系统应用 2012年4期
李铁林,张丽艳,杨博文,叶南
(南京航空航天大学 机电学院,南京 210016)
引 言
红外LED发光亮度控制的基本原理是通过控制流过红外LED的平均电流大小来实现,图1所示为发光强度与平均电流的对应关系曲线。ENRI是红外LED归一化发光强度,IF是平均电流,图中实线部分表示持续电流,虚线表示脉冲电流。目前,在视觉测量领域,作为光学靶点的红外LED发光亮度调节方式主要可分为两类。
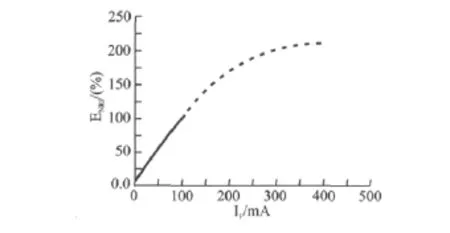
图1 发光强度与平均电流的对应关系曲线
一类是利用A/D转换芯片改变驱动电压的方式调节流过红外LED电流的大小,该方法具有线性好的优点,但是由于流过LED电流为持续电流,由图1可见不允许超过100mA,远距离测量时红外LED发光亮度不足。同时,单片机通过串口控制一块A/D转换芯片,一块芯片只能控制一个红外LED,较难实现同时控制多个红外LED的要求。
另一类是采用多路LED驱动芯片通过PWM(Pulse Width Modulation)方式调节流过红外LED的平均电流大小,使用PWM方式独立地调节每一个红外LED的发光亮度,该方式下红外LED的驱动电压恒定,所以LED导通时的电流是一个定值,本文中称作“原始电流”I。
采用高频的脉冲信号控制LED的导通和关断,通过脉冲脉宽调制的方法调节导通和关断时间的比例来实现平均电流大小调节,该方法的优点是可同时实现控制多路红外LED的发光亮度、调节精度高,但是受LED驱动芯片负载电流能力的限制,通过每个红外LED的极限电流值为50mA。
1 控制系统的组成以及工作方式
整个光学靶点亮度自适应控制系统包括计算机、通信电路(包括主副两个模块)、光学靶点控制驱动电路3个部分,可工作于有线、无线两种工作模式,控制系统结构框图如图2所示。控制系统的工作可描述为如下4个过程:
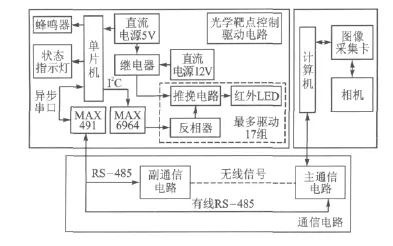
图2 控制系统结构框图
①计算机对采集到的图像进行分析,如果成像光斑不满足要求,发光亮度调节函数根据红外LED的成像分析结果并计算出发光亮度调节参数,发光亮度调节参数写入MAX6964后可以调节各路输出PWM信号占空比,作用到下一次拍摄时红外LED的发光亮度控制。
②计算机通过自身串口RS-232将控制信息传送到主通信电路,控制信息包括硬件电路状态检测、错误报警、单个红外LED闪烁、测量(控制信息中包含该次测量时红外LED的发光亮度调节参数)。主通信电路根据工作模式将信号转换,在有线模式下将信号转换为抗干扰能力强、传输距离远的RS-485差分信号,通过双绞线传送到红外LED控制驱动电路;无线模式下则将信号转换为无线载波,副通信电路接收无线载波后转换为RS-485差分信号,并通过双绞线传送到红外LED控制驱动电路。
③单片机接收到控制信息后进行判断、决策,执行相应的动作,如果是测量命令,则需要驱动红外LED,一方面判断是否需要使用继电器对“原始电流”I的大小进行切换,需要则进行切换,反之则保持原电流大小。另一方面,控制多路LED驱动芯片MAX6964按照要求输出多路由发光亮度参数重新确定了占空比大小的脉冲波形,对各个红外LED的发光亮度进行调节。
④单片机在执行命令中或者执行完命令后,反馈给计算机命令执行信号。每一条控制信息执行后都要反馈执行信号给计算机,使计算机始终掌握红外LED驱动控制电路的工作状态以及是否正确执行该命令,测量命令反馈的执行信息同时是计算机图像采集的触发信号。
在设计制作集成电路时,将控制驱动电路、主通信电路、副通信电路分别设计成3块彼此独立的集成电路。现阶段每块控制驱动电路设计驱动8个红外LED,根据RS-485通信网络组成方式,可以使用多个控制驱动电路组成控制驱动网络,RS-485通信网络图如图3所示,从而实现一台主机同时控制多数目的红外LED工作。
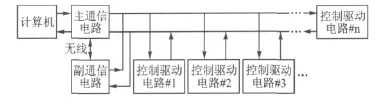
图3 RS-485通信网络图
2 关键电路工作原理以及电路设计
2.1 红外LED驱动电路工作原理
红外LED驱动电路基本原理图如图4所示。驱动电路由一对三极管构成的推挽电路来直接驱动红外LED,由PWM信号控制红外LED导通、关断,达到调节平均电流大小的目的。工作时,A点为高电平时,Q1导通、Q2截止,红外LED通过正向电流I,即“原始电流”;A点低电平时,Q1截止、Q2导通,红外LED关断。三极管Q1型号选用S8050,输出电流最高可达500mA,完全满足驱动红外LED电流大小的要求。
三极管Q1工作在饱和状态,三极管导通时产生饱和压降vCE(sat),红外LED导通时产生正向压降vF,导通时供电线路也会产生线路耗损压降vL(vL一般很小,可以忽略)。设供电电压为VCC,则导通时通过每个红外LED的I大小为:

关断时通过每个LED的I为0。
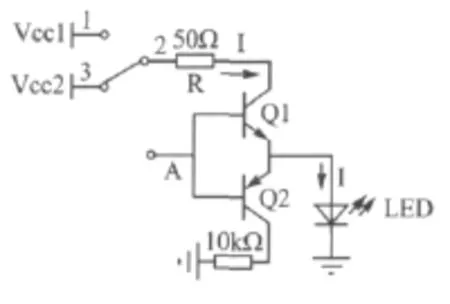
图4 红外LED驱动电路基本原理图

设相机的曝光时间为T,则在这段时间通过红外LED的平均电流为:假设调节第n个红外LED的脉冲占空比为αn(0<αn<1),则通过此红外LED的平均电流IF为:
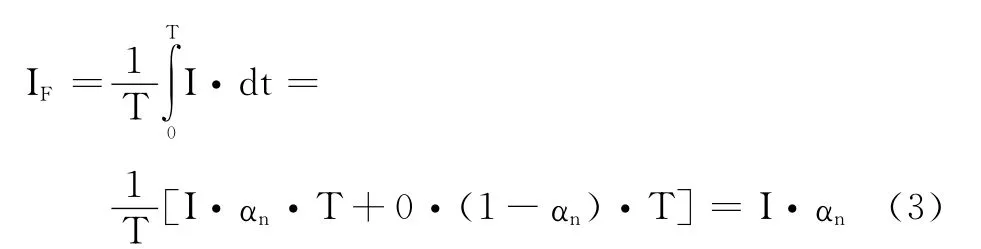
红外LED的发光强度决定于平均电流IF=Iαn,即决定于“原始电流”I的值和脉冲占空比αn的大小,I的大小主要决定于VCC的大小。设计红外LED驱动电压的大小可进行切换,这样在近距离测量时,切换成小的驱动电压,则电流I较小,配合脉冲占空比调节可以在近距离测量时获得高的调节精度;在远距离测量时,切换成大的驱动电压,电流I较大,可以满足发光亮度的需求。
2.2 靶点控制驱动电路设计
图5为多路LED驱动芯片MAX6964的设计工作电路原理图,MAX6964共有17个用于驱动LED的开路输出端口,MCU使用I2C串行接口和MAX6964相连,通过串行接口将发光亮度调节参数写入MAX6964内部相应的控制寄存器,实现对芯片工作的控制。芯片输出端口为开路输出,存在两种状态:“高阻态”、“低电平”。当输出端口状态为“高阻 态”时,LED 关 断;为 “低 电 平”时,LED 导 通。MAX6964输出端口的PWM调节正是基于以上实现的。但是由于其芯片设计每个输出口最大允许通过电流值为50mA,最大输入电压为7V,芯片接地电流最大允许350 mA,这些电流限制使得驱动红外LED时发光亮度不能满足需求,但是其多路输出PWM调节功能是本文所需要的。
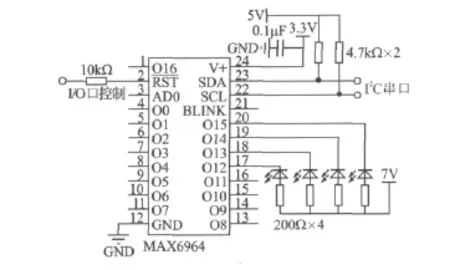
图5 多路LED驱动芯片MAX6964的设计工作电路原理图
根据其输出口特性,结合红外LED驱动电路原理,设计了如图6所示的红外LED控制驱动电路。利用MAX6964输出端口为开路输出的特性,通过在端口加上拉电阻构成新的输出端口。芯片输出端口为“高阻态”状态时,上拉电阻使C点为高电平,直接用其驱动推挽电路则使红外LED导通,与芯片本身设计“高阻态”状态时红外LED关断相矛盾,给控制程序设计带来不必要的困难。所以,使用反相器对输出电平进行反向,经过反向后输出到A点得到低电平,驱动推挽电路使红外LED关断;同理,芯片输出端口状态为“低电平”时,红外LED导通。通过MCU的I/O口控制继电器,切换红外LED驱动电路的驱动电压,实现了调节“原始电流”I大小的功能。
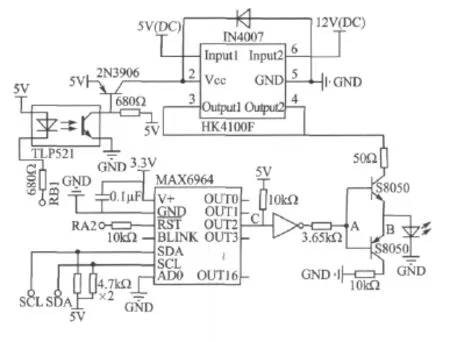
图6 红外LED控制驱动电路原理图
图7为单片机控制系统电路图,此设计中选用的单片机型号为PIC16F873A。首先,I2C串行接口RA2用来连接MAX6964控制端口,配合串行接口进行控制;异步串行接口用来和计算机进行通信,I/O口RA5控制数据信号电平转换芯片 MAX491的发送、接收使能;I/O口RB1控制继电器切换;I/O口RA0、RA1控制一红一绿两个彩色LED灯的发光或熄灭,同时此LED还可作为状态指示灯;RA3控制蜂鸣器开关实现报错提醒功能;利用I/O口RB4~RB7输入电平变化可产生中断的特点,使用RA4、RA5设计两个按键,作为功能扩展备用。
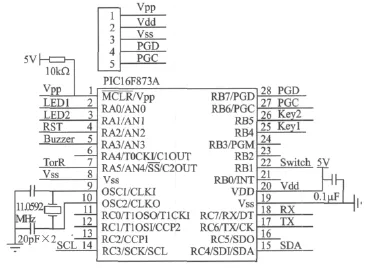
图7 单片机控制系统电路图
2.3 通信电路设计
主通信电路原理图如图8所示,可使用有线和无线两种数据传递方式。数据发送时,首先使用MAX232芯片将计算机通过自身RS-232接口传递的数据转换为两路TTL电平信号,一路信号经过光电隔离后,通过MAX490芯片转换为差分信号,由RS-485接口将数据传递到红外LED控制驱动电路;另一路经过反相器提升负载能力后接入无线收发接口,在该接口连接上,无线收发器可以无线方式将数据传递到副通信电路。
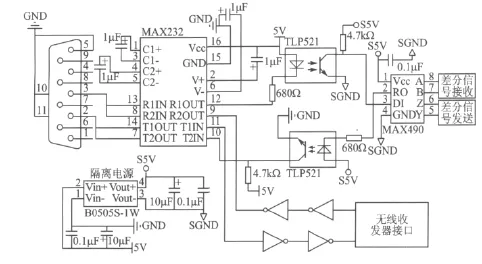
图8 主通信电路原理图
副通信电路原理图如图9所示。其工作在无线模式下,使用无线收发器和MAX490芯片实现TTL电平信号与差分信号的相互转换,同时使用光电耦合器进行光电隔离,配合在无线模式下工作主控电路实现无线模式通信功能。
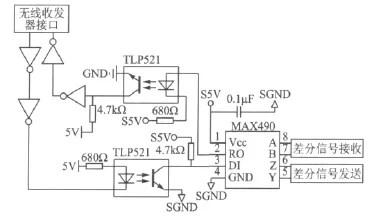
图9 副通信电路原理图
3 软件编程
计算机和单片机之间制定了每条命令(控制信息)的数据传递格式、数据量以及校验方式。程序设置串口打开中断,串口接收到数据并转入中断程序,在中断程序中,将接收的数据存储下来并对命令接收计数值加“1”,然后判断是否整条命令接收完成。如果传递的数据量达到了规定命令,则清零接收计数值,等待接收下一组命令,同时置“1”命令标志位;主程序运行时不断查询命令标志位,如果发现其被置“1”,说明接收到一条完整的命令,先进行校验,判断接收到的命令数据是否正确,然后根据数据中包含的控制信息执行相应的操作。单片机程序流程图和调节函数流程图略——编者注。
4 实 验
MAX6964可产生占空比从1/240到240/240的脉冲信号。选择5V、12V直流电压作为驱动电压,限流电阻为50Ω。继电器切换到供电电压5V时,通过示波器观察到限流电阻两端电压差为3.5V时,则通过红外LED的“原始电流”I的值为70mA;切换到12V工作时,通过示波器观察到限流电阻两端电压差为10.2V。同理,此时驱动红外LED的I值为204mA。根据不同的占空比,计算出平均电流IF。
占空比与电流对应关系表略——编者注。
跟踪测量时,保证10次/s测量,曝光时间最大设为30ms,此时平均电流超过140.25mA时,相机距离红外LED约10.5m可以拍摄得到符合要求的靶点成像,所以本文将占空比最高定为196/240。经过实验,使用5V电压驱动红外LED,可以在2.5~6.5 m范围内获得良好的调节效果;使用12V电压驱动红外LED,可以在4~10m范围内取得良好的调节效果。
结 语
通过实验数据可以看出,通过PWM方式配合驱动电压大小切换可大范围的调节通过红外LED的平均电流大小,切换到小电压驱动可满足靶点和相机距离较近时调节精度的要求,而切换到大电压驱动可满足靶点和相机距离较远时发光强度的要求。
编者注:本文为期刊缩略版,全文见本刊网站www.mesnet.com.cn。
[1]黄凤山.光笔式单摄像机三维坐标视觉测量系统关键技术的研究[D].天津:天津大学,2005.
[2]李云飞,司国良,郭永飞.科学级CCD相机的噪声分析及处理技术[J].光学精密工程,2005(13):159-163.
[3]郝云彩,杨秉新,张国瑞.线阵CCD相机细分采样成像的像质研究[J].光学学报,2000,20(10):1407-1411.
[4]刘长英,车仁生,黄庆成,等.视觉测量中光学特征点亮度控制方法研究[J].光学精密工程,2004,12(3):93-96.
[5]唐巍.基于红外LED的光学测棒优化控制技术[D].哈尔滨:哈尔滨工业大学,2006.
[6]程安宁,王晋,尚相荣.白光LED的PWM驱动方式分析[J].电子设计工程,2010,18(2):109-111.
[7]L Svilainis.LED PWM dimming linearity investigation[J].Displays,2008,29(3):243-249.
[8]卢亚普,陈强,张世福.RS485总线调试设备的接口设计[J].信息科技,2011(1):58-60.
猜你喜欢
环球时报(2022-05-23)2022-05-23
莆田学院学报(2021年5期)2021-11-13
金桥(2021年4期)2021-05-21
甘肃科技(2020年20期)2020-04-13
电子制作(2019年7期)2019-04-25
摄影之友(影像视觉)(2019年3期)2019-03-30
小天使·六年级语数英综合(2017年5期)2017-05-27
光学精密工程(2016年3期)2016-11-07
现代工业经济和信息化(2016年19期)2016-05-17
公民与法治(2016年23期)2016-05-17