基于TMS320F2812的交流伺服运动系统设计
2012-09-22 03:19,
电气传动 2012年5期
,
(凯迈(洛阳)测控有限公司,河南 洛阳 471009)
1 引言
交流伺服运动系统相对于步进运动系统具有以下优点[1]:噪音小;电机轴后端的旋转编码器保证了控制精度高;低速运行平稳,并具有共振抑制功能,可涵盖机械刚性不足;矩频特性稳定,额定转速内以额定转矩输出,额定转速外以恒功率输出;具有3倍于额定转矩的过载能力,可以克服惯性负载在启动瞬间的惯性力矩;控制性能可靠,不易出现丢步或过冲现象;速度响应快,从静止加速到额定转速仅需数ms,适用于快速启停的控制场合。
2 工作原理
本文设计的交流伺服运动系统主要由上位机、控制系统、交流电机及伺服驱动器、执行机构等组成,如图1所示[2-3]。
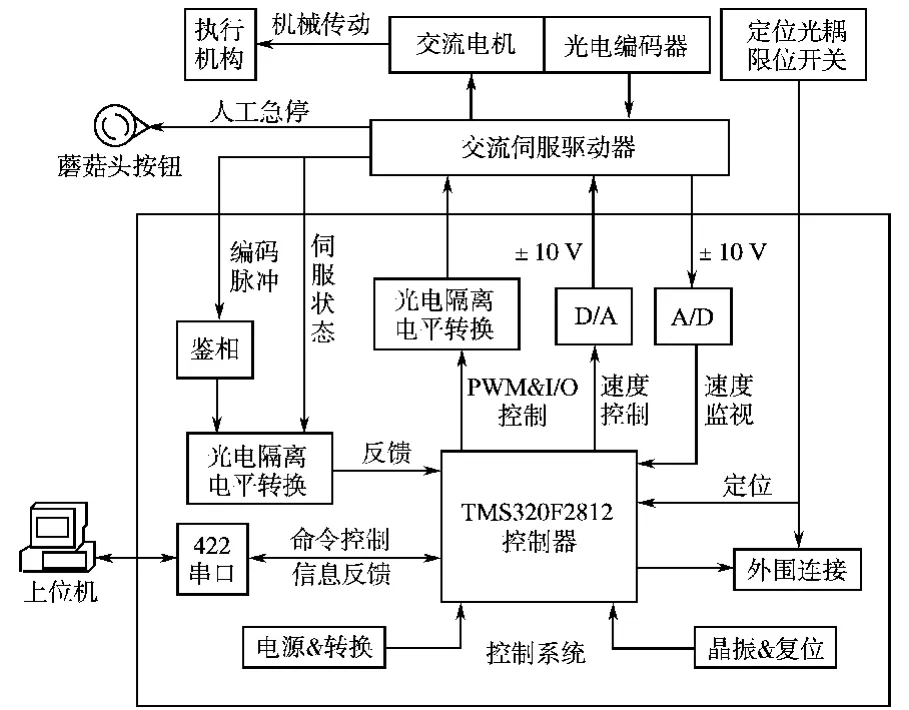
图1 交流伺服运动系统Fig.1 AC servo motion system
上位机通过422串口发出控制指令,同时反馈执行机构运动信息;控制系统通过交流伺服驱动器,以脉冲或正负电平两种方式控制交流电机按设定模式运转,并实时处理执行机构的运动信息;执行机构由导程为5mm的滚珠丝杠传动,配合伺服电机实现±1 000mm行程,定位精度0.01 mm,速度范围0.1~250mm/s、速度精度0.1 mm/s、加速度500mm/s2的速度连续可调的技术指标。其中,交流电机内置光电编码器输出反馈脉冲,伺服驱动器速度监视输出正负电平,两种数据经处理换算后提供执行机构当前运动方向、速度与位置等信息。
3 伺服驱动器
运动系统根据转动惯量与功率需求,选用松下高惯量交流电机MHMD082G1C,内置20位增量旋转式编码器。相应的交流伺服驱动器为MCDHT3520,其参数设置要与控制系统软硬件设计紧密配合,以实现速度及定位的控制精度要求。为反馈计算方便,输入脉冲/电平与反馈脉冲/电平等数量级,其参数对应关系如下:电机转速1r/s(60r/min)与目标速度5mm/s、控制/反馈电压200mV、控制/反馈脉冲频率3 240Hz相对应。如目标速度设为50mm/s时,电机转速为10r/s(600r/min),控制/反馈电压为2 000mV,控制/反馈脉冲频率为32 400Hz,其余可类推。
依据上述关系,设置交流伺服驱动器控制/反馈脉冲与电压参数如下:脉冲控制方式的指令采用脉冲序列+符号方式,PULS信号的脉冲频率与电机运行速度相对应,SIGN信号的高低电平与电机的正反转相对应,如图2所示。
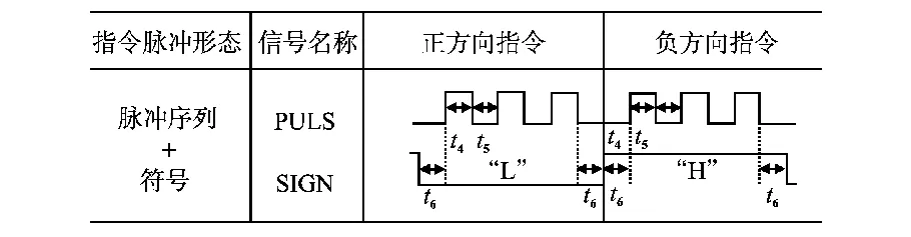
图2 脉冲控制方式Fig.2 Pulse control mode
正负电平控制方式速度指令输入增益与速度监视输出电压均设置为10V←→3 000r/min;加速度为500mm/s2,交流伺服驱动器加/减速时间均设置为5ms,即从0运行至1 000r/min所需要的时间。
目标速度分为高中低档,低档0.1~99.9 mm/s,中档100~175.9mm/s,高档176~250 mm/s,在单程定位运动及将运行至极限位置±1 000mm处时,以24ms为周期的加/减速调整范围分别为2mm,4mm和6mm,以最大限度地减少目标运动惯量的影响。由于伺服驱动器在速度指令控制电压不超过60mV,以及内部速度指令不超过30r/min时,会产生电机不转的现象,因此驱动器采用位置/速度控制模式。根据上位机的控制命令,当电机运行速度小于60 r/min时采用位置控制模式;当电机运行速度大于60r/min时切换到速度控制模式。
伺服驱动器SF1与SF2并联联接,以常闭形式接入蘑菇头按钮开关,提供紧急情况下人工关闭驱动信号、切断电机电流的功能。
4 控制系统
4.1 硬件设计
控制系统硬件主要由电源与转换、晶振与复位、TMS320F2812、串口通信、脉冲控制与反馈鉴相、速度电平控制与监视、定位与限位等电路模块构成。
电源转换芯片TPS767D301输入5V,输出3.3V供 TMS320F2812I/O电压,输出1.9V供TMS320F2812核心电压,并提供复位输出功能;晶振30MHz,经PLL锁相环5倍频后供给TMS320F2812内核;串口通信采用 MAX3162,可同时实现232及422两种模式通信,其中232模式用于辅助调试,422模式用于控制命令的接收和电机运行信息的反馈。
脉冲控制与反馈模块利用高速光耦HCPL-2631对驱动器控制脉冲序列PULSH及符号SIGNH进行光电隔离处理;利用中速光耦TLP521-4对驱动器控制信号INH,POT,NOT,CL,SRV-ON,ZEROSPD,C-MODE,A-CLR,对驱动器反馈信号S-RDY,ALM进行光电隔离处理,以提高抗干扰性,并具有3.3V与24V电平信号的匹配与转换功能。
脉冲鉴相模块中,伺服电机内置编码器通过伺服驱动器输出A,B,Z3路差分互补脉冲,计算A相或B相的脉冲个数,经换算得目标当前运行速度和位置信息。当电机内置光电编码器正转时,A相超前B相1/4周期;反转时,A相落后B相1/4个周期。根据光电编码器正反转时A相与B相的相位差关系,将A相与B相分别接到D触发器SN54LS74AJ的D端与CLK端,如图3所示。则正转时,Q=0;反转时,Q=1。
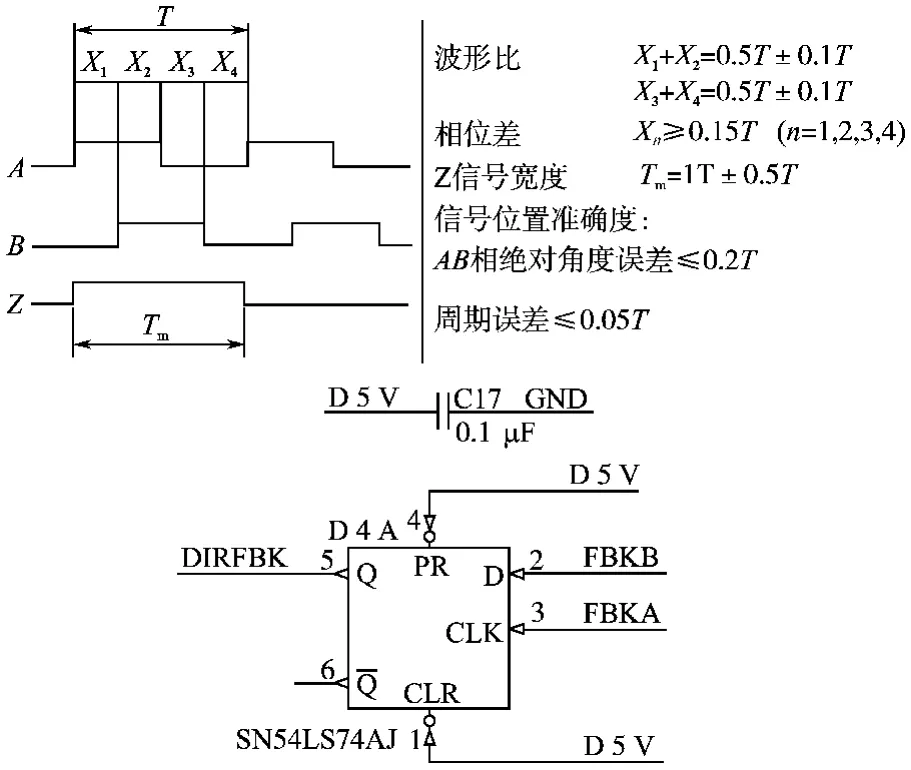
图3 光电编码器反馈脉冲波形与鉴相Fig.3 Feedback pulse waveform and identifying of the optical encoder
当伺服驱动器工作在速度模式时,速度电平控制模块通过14位D/A转换器AD7841BS输出-10~10V电平,控制电机正反转及其运转速度。速度电平监视模块采用14位A/D转换器TLC3578接受±10V的速度监视输出电压,以反馈电机正反转及其运转速度。
对射型光电开关GK122分别安装在行程为-1 000mm,0mm,1 000mm处,其引脚电平变化触发中断,提供位置基准,配合其它控制引脚实现定位、校准、限位等功能。其中0mm处光电开关的零位基准点配合反馈脉冲进行计数,计至极限位置则返回,提供软件保护功能。行程开关KW4A-1ZA紧贴极限位置光电开关外,当程序异常或漏判±1 000mm而冲至行程有效动作范围内时,则直接切断驱动器的24V供电回路,提供硬保护功能。
词在最初是配合乐曲演唱的,而词牌就是曲调,这些曲调又分属于各种宫调,决定宫调之后才能演奏曲谱。《点绛唇》调名用南朝江淹《咏美人春游诗》:“江南二月春,东风转绿蓣。不知谁家子,看花桃李津。白雪凝琼貌,明珠点绛唇。行人成息驾,争拟洛川神。”元《太平乐府》注“仙吕宫”;高拭词注“黄钟宫”;《正音谱》注“仙吕调”。龙榆生先生在《唐宋词格律》中也提到“《清真集》入’仙吕调’,元北曲同,但平仄句式略异,今京剧中犹常用之”。
4.2 软件设计
为实现电机可靠运行及控制的实时性,TMS320F2812软件设计主要采用中断方式。主函数在初始化后等待伺服驱动准备好,之后便进入休眠状态等待中断。中断资源分配及相应功能如下。
串口A中断:主要实现命令的接收与目标当前位置与速度信息的反馈,为克服数据传输过程中的不确定性,采用帧起始字符+数据/命令+校验字+帧停止字符的数据格式。
外部中断1:主要实现交流电机报警处理与3个定位光耦处定位与基准点设置功能。
通用定时器1比较中断:主要实现交流电机的控制输出PWM波的精细调整。
通用定时器2捕获中断:主要实现目标当前位置与速度的计算。
通用定时器3溢出中断:提供10ms的中断间隔,控制速度监视A/D的采样频率。
通用定时器4溢出中断:提供6ms的时间单元,用于24ms周期间隔的PID算法调用。
为保证交流电机运行速度平稳快速准确地到达设定值,调用带死区的PID控制算法,其死区范围为设定值±10mm/s范围内,超出该范围则不进行PID控制。在不产生过大过冲的情况下,尽可能地把起控点抬高,以利于后续控制部分进一步细化。另外,在进入控制之前所有积分项的数据记录进行清零处理。
对PID参数进行整定时,首先将控制范围10 mm/s划分为100等分,即0.1mm/s的速度控制精度,设其为标准控制单位U。速度误差最大为250mm/s,所对应的控制量为2 500U,则Kp值设为25,然后根据PID归一参数整定公式确定Ki与Kd初始值,再在此基础上细调。
4.3 抗干扰设计
伺服驱动器通过高速开关输出电流,是伺服运动系统中主要的噪声来源,其抗干扰设计从布局、布线、接地、屏蔽、滤波与隔离等方面进行[4-5]。
布局根据EMC的区域原则进行。控制电路板单独置于一个金属盒内,伺服驱动器、开关电源等单元靠近控制箱底部,用接地金属隔离板将区域隔离。
布线采用树叉状方式,强弱分开,电机电缆和其它电缆长度最小距离为500mm,并避免构成环路。控制电缆和电源电缆、动力电缆90°交叉。24V及其以上的强电电缆屏蔽层两端接地,并用金属夹将屏蔽层固定在安装板上。强电接地板和信号线接地板最小距离20cm,用6mm铜带搭接至大地端子。
接地采用3层次接地方式,如图4所示。3层次接地线在汇入基准地之前不能随意短接,各级连接按规定进行,同时接地线要直、短、粗。
滤波器端接的阻抗在严重失配的状态下工作,以使之具有最佳的衰减性能。

图4 3层次接地Fig.4 Three levels of grounding
系统中受干扰影响最大的为3根光耦定位信号采集长线。在电机使能情况下,感应电压>10 V,频率2~12MHz,且在电机静止而励磁时干扰最大。为保证与PCB上的弱电系统完全隔离,使用MOS FET继电器作为强弱逻辑转换关口,以负逻辑传输方式反映定位对射型光电开关的遮断与否,达到延时1ms左右、隔断励磁感应电压干扰的效果,见图5。对于不确定因素所造成的干扰,将3根较长的定位信号采集线所对应的I/O的输入限制寄存器GPAQUAL进行多次采样,配合继电器滤除1MHz以上的干扰。
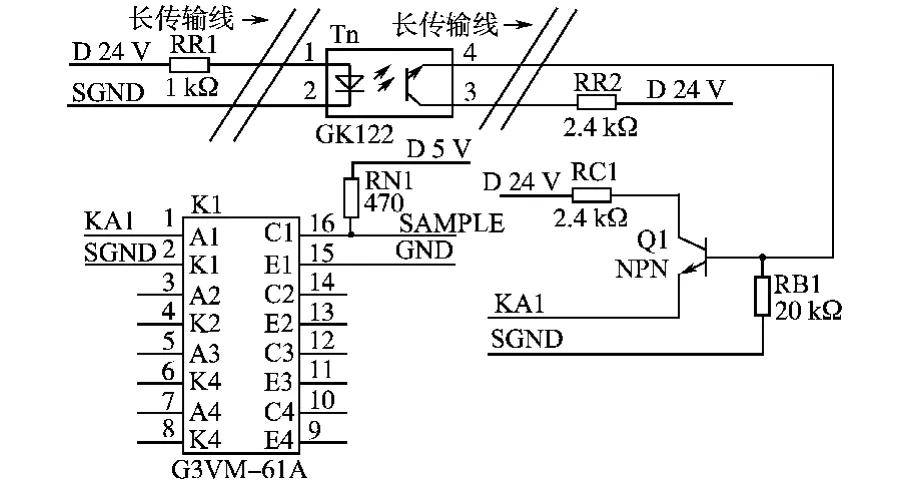
图5 长线传输抗干扰处理Fig.5 Anti-jamming process of long-wire transmission
4.4 安全性设计
为保证系统运行安全,设计有软限位、硬限位、机械缓冲装置。
软限位首先通过定位对射型光电开关设定基准值,然后对控制脉冲或反馈脉冲计数,经换算后得到目标当前位置值,当超过理论极限值时,就使电机运动方向置反。
硬限位通过急停蘑菇头按钮与行程开关串连实现,一旦目标越界触发任意行程开关动作或急停蘑菇头按钮动作,无论是安全输入SF1或SF2,断电输入后5ms以内,STO功能工作,电机的输出转矩被关闭。
机械缓冲装置可消除或降低断电后运动机构的惯性冲击。
5 试验与应用
利用示波器观测发送的PWM脉冲频率及编码器反馈脉冲频率,在匀速阶段单脉冲频率与理论值相比变化[-75,40],10个脉冲平均频率变化[-50,23],在0.1mm/s所对应的变化区间[-64.8,64.8]之内,整体运行平稳。
利用定时器3计算目标实时速度与位置,通过串口反馈信息。其中,对速度进行四舍五入处理。由于程序执行片段差异及串口发送与命令接收延迟,速度与理论值相差[-0.2,0.1];定位脉冲与理论值相差[-3,-13],折算为位置后相差[-0.004 6,-0.02]。
利用驱动器模拟监视器进行速度监视,在匀速阶段驱动器液晶显示屏上数据变化±1,折算为目标速度相差±1/12mm/s。
上述数据表明,该系统在实现±1 000mm行程、速度0.1~250mm/s范围内连续可调的前提下,满足给定的定位精度0.01mm,速度精度0.1 mm/s的技术指标。
该系统已在某型地面测试设备中应用,通过模拟飞行目标的偏航姿态,对某雷达型产品的动态特性加以测试。系统停放位置与角度灵活,高度与水平度可根据两侧支撑三角架进行调整,拆装搬运方便,使用方反映良好。
6 结论
所设计的交流伺服运动系统依据系统需求与技术指标进行量体裁衣,通过分析控制命令中的运动模式与速度参数,能够自动匹配与设置合适的位置控制或速度控制模式,并且其位置和速度参数在指定范围内可随时设置。同时,该系统还具备软限位、硬限位和人工急停3种安全保护功能,具有较高的性价比与良好的应用前景。文章对交流伺服运动系统的响应延迟性、振动性及多轴联合运动的研究不足,为下一步的努力方向。
[1]秦忆.现代交流伺服系统[M].武汉:华中理工大学,1995.
[2]王晓明.电动机的DSP控制[M].北京:北京航空航天大学出版社,2002.
[3]苏奎峰.TMS320F2812原理与开发[M].北京:电子工业出版社,2006.
[4]王幸之.单片机应用系统抗干扰技术[M].北京:北京航空航天大学出版社,1999.
[5]诸邦田.电子电路实用抗干扰技术[M].北京:人民邮电出版社,1994.
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
电脑爱好者(2020年6期)2020-05-26
哈尔滨轴承(2020年4期)2020-03-17
猪业科学(2018年4期)2018-05-19
新能源科技(2018年1期)2018-02-17
北京航空航天大学学报(2017年5期)2017-11-23
光学精密工程(2016年5期)2016-11-07
电测与仪表(2016年22期)2016-04-12
电子工业专用设备(2015年4期)2015-05-26
电测与仪表(2015年2期)2015-04-09