基于dsPIC30F3010的无刷直流电动机控制系统设计
2012-09-19 10:29:06郎宝华闵喜艳
电子设计工程 2012年2期
郎宝华,闵喜艳,张 婧
(西安工业大学 电子信息工程学院,陕西 西安 710032)
无刷直流电动机(BLDCM)是随着电力电子技术的迅速发展而发展起来的一种新型电动机,具有可靠性高,易维护等一系列优点,在家用电器和工业生产领域中得到了广泛的应用[1]。就其基本结构而言,无刷直流电动机可以认为是一个由电机本体、转子位置检测电路以及电子开关电路三者共同组成的“电动系统”。
无刷直流电动机电子开关线路是用来控制电动机定子上各相绕组通电的顺序和时间的,主要由功率逻辑开关单元和位置传感器信号处理单元两个部分组成。功率逻辑开关单元是控制电路的核心,其功能是将电源的功率以一定逻辑关系分配给无刷直流电动机定子上各相绕组,以便使电动机产生持续不断的转矩。而各相绕组导通的顺序和时间主要取决于来自转子位置检测电路的转子位置信号。但转子位置检测电路所产生的信号一般不能直接用来控制功率逻辑开关单元,往往需要经过一定逻辑处理(功率放大)后才能去控制逻辑开关单元。
无刷直流电机的无位置传感器控制的难点在于转子位置信号的检测。国内外研究人员提出了诸多方法,典型的方法有:反电动势法、三次谐波检测法、电感检测法和扩展卡尔曼滤波法等[2]。三次谐波检测法在高速时能够准确快速地估计转子位置,但是当电机的转速低于某个值时,检测到的三次谐波严重畸变,不能准确估计转子的位置。电感检测法需要对绕组电感进行不断的实时检测,实现难度较大。扩展卡尔曼滤波器法计算繁琐,对微机性能要求较高,实现较麻烦。反电动势过零点检测法通过检测各相反电动势的过零点,延迟30°电角度,获得相应的换相时刻,该方法虽然存在低速时难以得到有效的转子位置信号,由RC滤波电路引起的过零点相移等缺点,但该方法是目前技术最成熟,实现最简单,应用最广泛的转子位置检测方法。
普遍采用的控制方案为基于DSP的控制和基于专用集成电路的控制等,受芯片功能、速度和结构的限制,硬件设计中往往需要较多的外围电路,导致装置的整体集成度不高,硬件开发相对复杂。本文采用反电动势过零点检测方法,设计了基于dsPIC30F3010芯片的无刷直流电机无位置传感器控制系统,将高性能16位单片机的控制特点和DSP高速运算的优点相结合,为嵌入式系统设计提供了合适的单芯片、单指令流的解决方案,其结构简单,运行性能良好[3]。
1 系统硬件设计
本无刷直流电动机无位置传感器控制系统的硬件以美国微芯公司(Microchip)生产的数字信号控制器dsPIC30F30l0为核心控制器。dsPIC30F3010具有6路10位A/D、专门针对电机设计的6路PWM模块、5路16位定时器、24 kB Flash程序存储器以及1 kB RAM。dsPIC30F系列器件采用功能强大的16位架构,无缝集成了单片机(MCU)的控制功能和数字信号处理器的计算能力。因此是以高速、重复计算和控制为基础的应用的理想选择[4]。
1.1 系统硬件总体设计
系统硬件电路由主电路、驱动电路、过零点检测电路、采样电路、各种保护电路组成。dsPIC30F3010控制器首先通过反电动势检测法获得转子的位置信号,并根据转子的位置发出相应的控制字来改变PWM信号的当前值,从而改变直流电动机驱动电路中功率管的导通顺序,实现对电动机转速的控制。然后系统根据转子的位置和间隔时间测出电机转速。将检测到的各相的电流转换成电压信号降压后输入到DSC的A/D转换器,其值与经速度调节后产生的电流参考值比较,形成PWM占空比的控制量,来改变直流无刷电机电枢电流,从而达到控制电机转速的目的。控制系统中采用全桥PWM调节方式,通过改变PWM控制脉冲的占空比来调节输入无刷直流电机的平均直流电压,以达到调速的目的。整个系统硬件框图如图1所示。
1.2 dsPIC30F3010外围电路的设计
图2为控制芯片dsPIC30F3010及其外围电路图。图中上接的是复位电路,S1是复位按钮,通过上拉电阻R2,这样VPP/MCLR引脚可置低电平来复位PIC单片机;S2为启停按钮,控制电机启停;SW1为调试/编程开关,闭合SW1即可切换到MPLAB ICD时钟线和数据线进行编程;HA,HB,HC为三相电压反馈;VBUS、IMOTOR接口分别是电机母线电压与电流的输入接口;在电路上通过一个可调电阻串一个电阻到地的方式,作为给定转速的设置。其中所串的小电阻,让AD无法读到0这么低的值,规避了给定转速下限的问题。用RB3/AN3、RB4/AN4、RB5/AN5实现电机端电压检测,得到反电动势过零点。PWM1L/PWM1H、PWM2L/PWM2H、PWM3L/PWM3H分别是A、B、C三相逆变桥电路上、下桥臂开关信号接口,采用PWM模块控制6个MOSFET通断,实现换相。
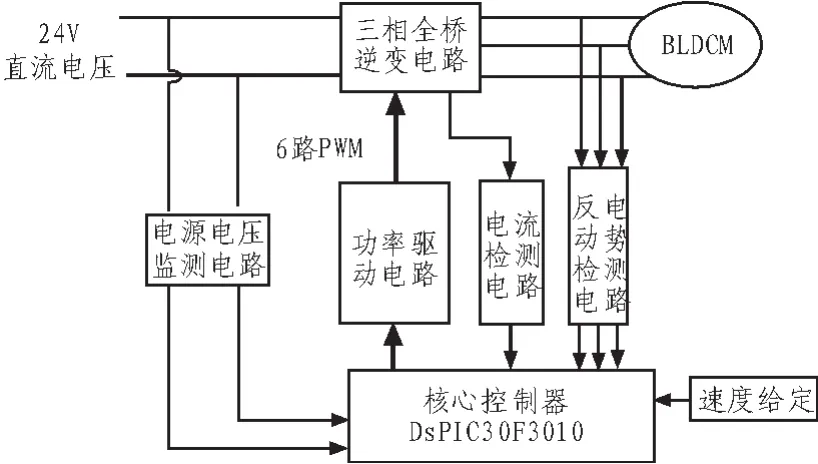
图1 控制系统硬件框图Fig.1 Hardware chart of the control system
1.3 逆变及其驱动电路的设计
逆变及驱动电路如图3所示。主电路采用三相桥式逆变电路,由控制部分产生六路的PWM脉冲,分别送到三片IR2101的2、3管脚,经 IR2101内部处理产生两个驱动信号驱动一个桥臂的两个功率MOS管。C15是自举电容,为上桥臂功率管驱动的悬浮电源存储能量,D1的作用防止上桥臂导通时的直流母线电压到IR2101的电源上而使器件损坏,因此应有足够的反向耐压,当然由于D1与C15串联,为了满足主电路功率管开关频率的要求,D1应选快速恢复二极管,而且自举电容容量取决于被驱动功率器件的开关频率、占空比以及充电回路电阻,必须保证电容充电到足够的电压。在本电路中,自举电容选的是 2.2 μF 的电解电容。 R30、R31、R32和R33作为限流电阻,防止驱动信号电流过大,损坏器件。
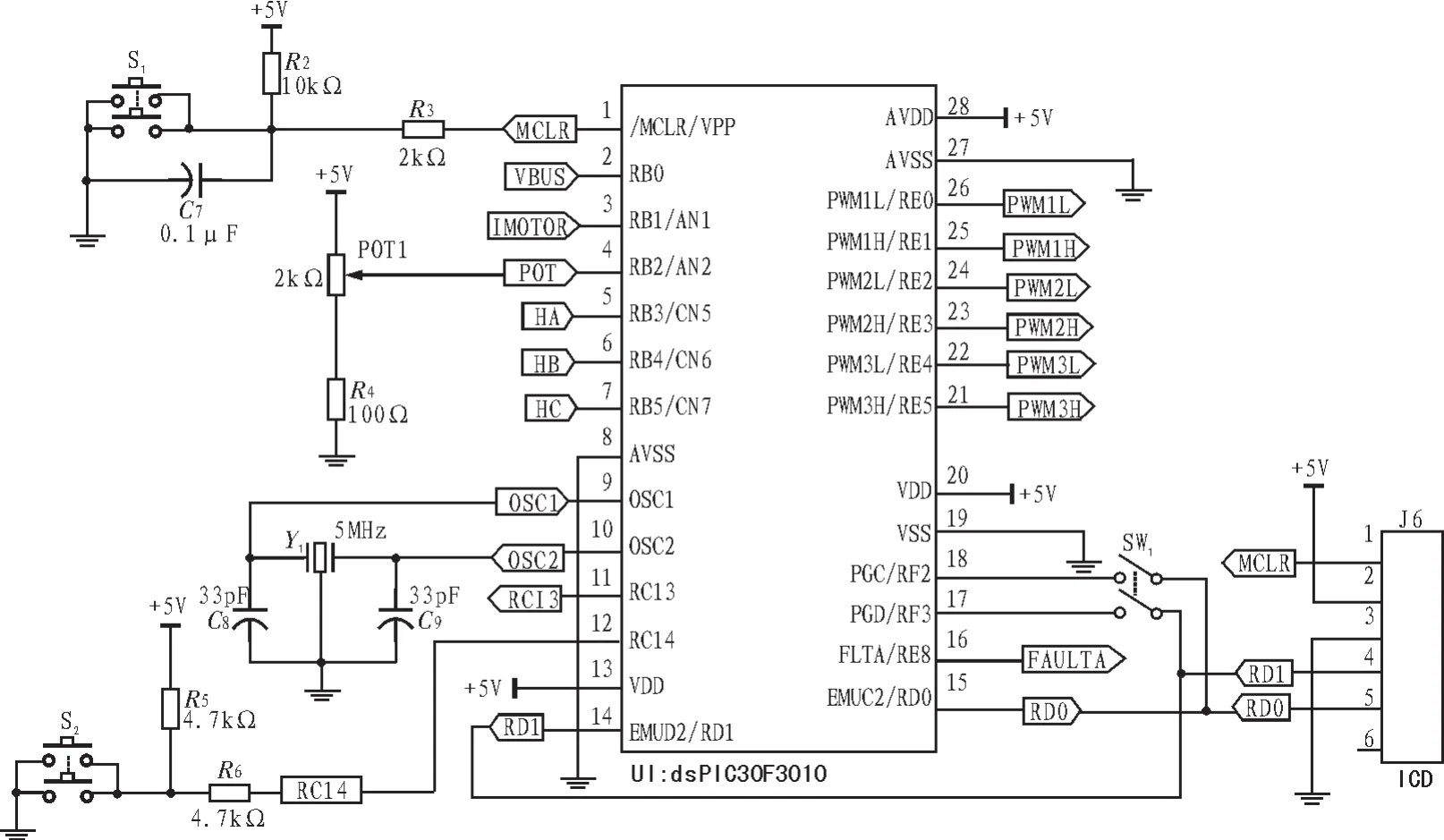
图2 控制芯片及其外围电路Fig.2 Control chip and its peripheral circuit
图3中仅为联接电动机A相绕组桥臂的驱动电路。同理,联接另外两相绕组的桥臂驱动电路类似。
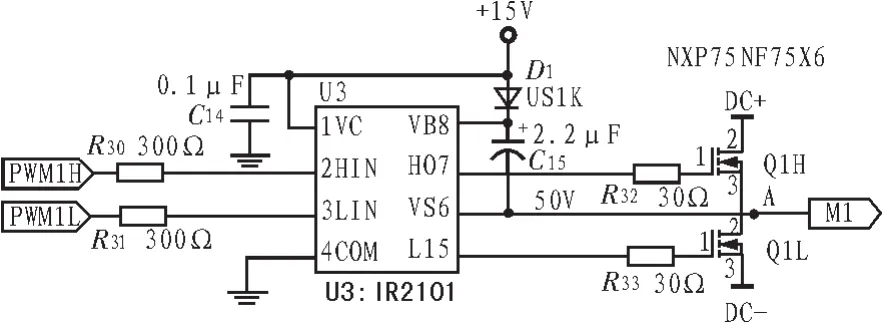
图3 逆变及其驱动电路Fig.3 Inverter and the MOSFET driver circuit
1.4 反电动势检测电路的设计
无刷直流电动机稳态运行时,忽略电机电枢反应,通过检测关断相反电动势的过零点来获得永磁转子的关键位置信号,从而可以控制绕组电流的切换,实现电机的运转[5]。
由无刷直流电机结构知,反电动势过零点与转子位置有对应关系,通过对定子绕组上反电动势的检测得到过零点,就可以得到转子位置信息。在PWM导通期间,悬空绕组的端电压等于反电势与1/2电源电压的叠加,检测处于不通电相绕组的端电压,其值等于电源电压的一半时为反电动势过零点信号[6]。如果能够准确地检测到反电势的过零点信号,即可判断出转子的位置,经过π/6电弧度延时处理后,可确定出换相时刻,再根据功率管的导通顺序触发相应的功率管以实现无刷直流电机的换相,保证电机按固定的方向连续旋转。
假设速度大于零,则每个电周期中某相的BEMF为零的位置只有两个,如图4所示,通过过零点时BEMF的斜率来区分这些位置。每一段对应电周期中的一个60°部分(共有6个相等的60°部分)。换相发生在每一段的边界处,因此需要检测段的边界。BEMF过零点和需要换相的位置之间有30°的偏移,必须对其进行补偿,以确保电机平稳高效运转。
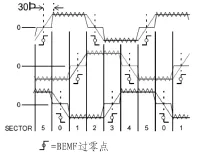
图4 三相绕组的反电动势波形Fig.4 Back-EMF curve of three-phase winding
三相反电动势检测电路图如图5所示。图中画出了3个检测通道,分别是U、V、W三相反电动势的检测,其电路原理其实是简单的电阻分压网络,主要是为了将较高的信号电压降低,满足单片机AD转换输入要求。3相电压经过22 kΩ与 2.4 Ω电阻的分压后,再经过300 Ω电阻进入AN3,AN4,AN5这3个AD管脚, 用AN3、AN4、AN5实现电机端电压检测,得到反电动势过零点。在PWM开通期间,检测处于不通电相绕组的端电压,其值等于电源电压的一半时为反电动势过零点信号。
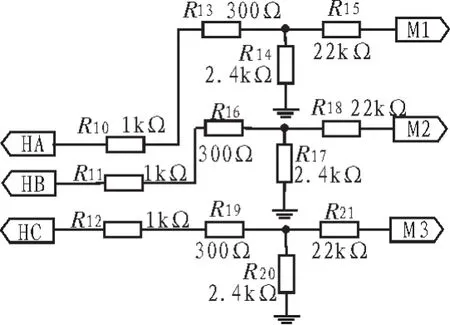
图5 三相反电动势检测电路Fig.5 Three Phase BEMF detective circuit
1.5 电流采样与过流保护电路
电流采样与过流保护电路如图6所示。为了获得电机的电流反馈信息,在DC母线负电压与地之间连接了一个低阻值的电流检测电阻(25 mΩ)。由此电阻产生的电压被一个外部运放 (MCP6002)放大并反馈到 ADC输入(RB1)。
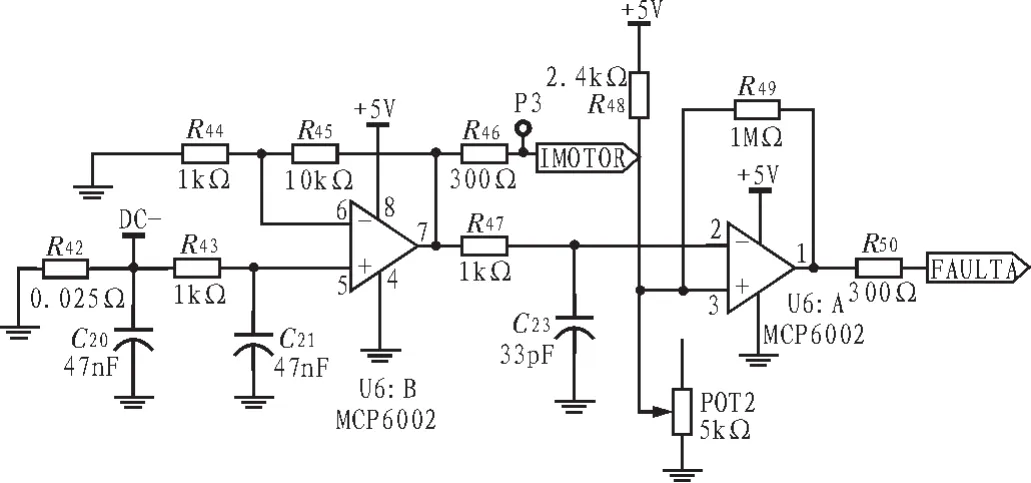
图6 电流采样与过流保护电路Fig.6 Current sampling and over voltage protection circuit
dsPIC30/33的电机控制系列MCU,都有一个FLTA脚,当得到低电平输出时,可以关断PWM的有效输出,使之成为无效。这是一个硬件处理的机制,因此可以快速处理故障事件,以实现安全操作。通过与电流反馈电路相连接的比较器电路(U6)可以获得故障输入信号,且比较器门限值可通过电位器POT2进行调节。
2 系统软件设计
软件设计包括DSC事件管理器初始化程序、电机起动程序、换相子程序、中断服务程序、速度环和电流环的控制程序等。主要实现了电机的开环启动、过零检测、换相、以及转速和电流闭环控制等。软件设计是在Microchip公司的集成开发环境MPLAB IDE中完成的,控制程序用C30语言编写。
主程序是一个死循环结构,用来完成dsPIC30F3010初始化、看门狗程序和中速事件处理程序。软件结构是以主程序为主,通过函数调用和全局变量与子程序进行参数传递。中速事件处理程序每10 ms循环一次,包括电机启动、速度控制、电流A/D转换及循环调用中断服务子程序等,是整个系统最重要的程序。主程序流程,中速事件处理程序流程分别如图7、8所示。
软件设计需注意以下4个问题:1)使用电机控制PWM模块的特殊事件触发器来启动A/D信号转换,可以使A/D转换与PWM时基同步。2)应舍弃换相后的最初几个反电势采样点,这样很容易避开相绕组的去磁问题,因为换相后绕组电流不会立即为零,要经过一个续流过程下降为零。3)不对端电压波形用硬件进行明显滤波,而是由软件根据PWM波形仔细地选取信号采样点,可排除互耦PWM开关噪声和不连续电流问题。4)使用QEI计数器记录连续监测到两个端电压过零点的时间,除以2即为30°电角度的时间,把此时间装载到定时器2中,定时器2经过30°电角度时间触发中断,调用换相子程序进行电子换相。
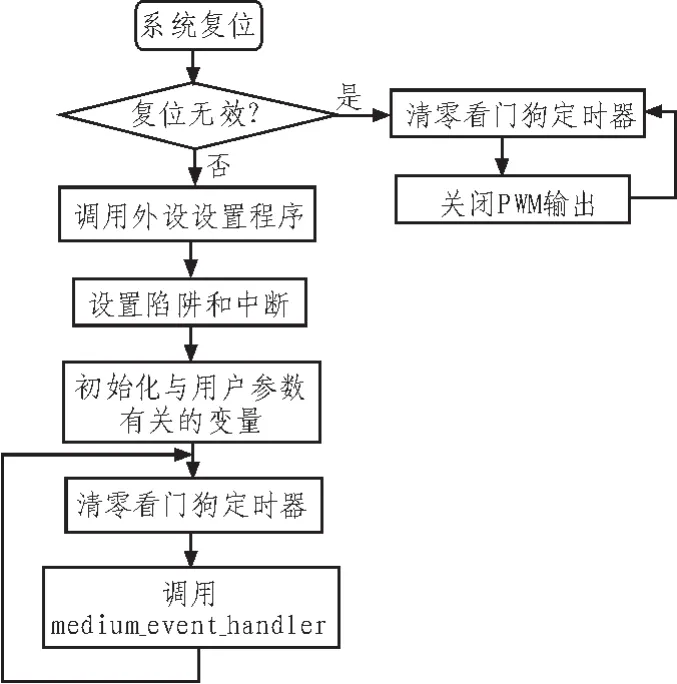
图7 主程序流程图Fig.7 Flow chart of the main Program
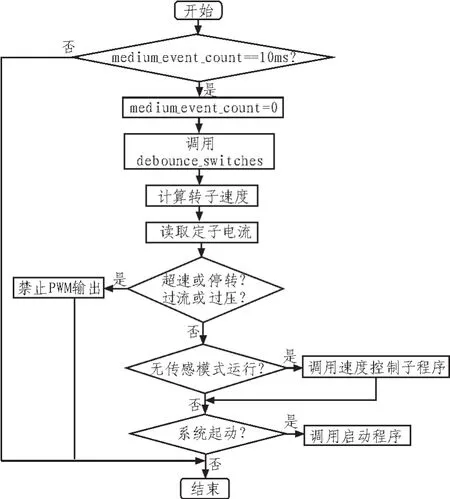
图8 中速事件处理程序流程图Fig.8 Flow chart of medium_event_handler
3 实验结果
以42BLF02型24 V,52 W,最大电流 9.4 A,额定转速为4 000 rpm的三相八极无刷直流电机为实验对象,采用转速、电流双闭环调节方式。实验平台以及电机稳定运行时其中两相端电压波形分别如图9、10所示。
在硬件和软件分别调试成功后,基于dsPIC30F3010芯片的无位置传感器控制系统能够控制电机顺利起动,并且很好地实现了实验电机的正确换相,保证了无刷直流电机正常运行。整套方案是切实可行的,试验结果也是比较理想的。
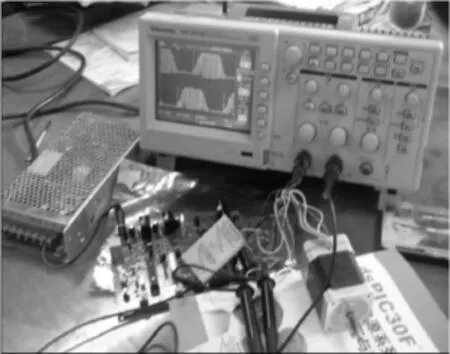
图9 实验平台Fig.9 Experimental platform
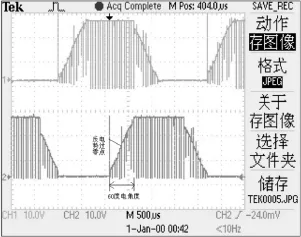
图10 端电压波形Fig.10 Terminal voltage curve
电机正常运行时端电压波形如图10所示,从图中可以看出端电压波形是较好的梯形波,与理论上的端电压波形一致。在箭头所指的60°电角度区间,该相绕组处于悬空状态,而另两相绕组处于工作状态。由理论分析可知,在相不导通时,相端电势等于相反电动势与1/2电源电压的叠加,从图中可以看出,在相不导通时,反电动势过零出现在相不导通时的中间位置,且有12 V的偏移量,与理论分析完全相同。
4 结 论
本系统在无刷直流电机无位置传感器控制系统的软硬件方面都采取了简约的设计方案。通过实验证明,采用上述控制技术,电机系统起动平稳,无振动和失步现象。与采用单片机的同类系统相比,DSC控制系统能够达到相当的功能与控制精度,而成本更低,简化了硬件的设计,是无刷直流电动机控制器的理想选择。
[1]张琛.直流无刷电动机原理及应用[M].北京:机械工业出版社,2001.
[2]吴筱辉,程小化,刘杰.反电势法检测转子位置的无刷直流电机起动方法[J].微电机,2005,38(4):79-81.
WU Xiao-hui,CHENG Xiao-hua,LIU Jie.Brushless DC motor starting technique with BEMF method of detecting the rotor position[J].Small Electrical Machines,2005,38(4):79-81.
[3]何礼高.dsPIC30F电机与电源系列数字信号控制器原理与应用[M].北京:北京航空航天大学出版社,2007.
[4]微芯科技公司.dsPIC30F3010数字信号控制器数据手册[EB/OL](2006).http://www.soiseek.cn/MICROCHIP/DSPIC30F 3010/3.htm.
[5]张陶,王毓顺,李学华.基于DSPIC的无刷直流电机闭环控制系统设计及软硬件实现 [J].计算机技术,2007,7(17):1671-1819.
ZHANG Tao,WANG Yu-shun,LI Xue-hua.Realization of closed loop control system for sensorless brushless DC motor and the hardware and software Based on DSPIC[J].Computer Technology,2007,7(17):1671-1819.
[6]Microchip Technology Inc.Sensorless BLDC Motor Control Using dsPIC30F2010[S].Microchip,2004.
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
郑州大学学报(工学版)(2020年2期)2020-06-16 12:43:14
汽车电器(2019年2期)2019-03-22 03:35:16
水电站机电技术(2017年9期)2017-09-26 03:34:52
电子制作(2017年1期)2017-05-17 03:54:12
微特电机(2016年3期)2016-11-29 09:43:45
科技创新导报(2015年32期)2015-04-12 09:22:46
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
电机与控制应用(2015年1期)2015-03-01 03:49:10
江苏通信(2014年4期)2014-04-14 06:18:42