基于波包提取技术的传感器组设计二维成像技术研究
2012-09-19 10:29:06刘宗信陈亦望张书迪
电子设计工程 2012年1期
刘宗信 , 陈亦望 , 张书迪
(1.解放军理工大学 江苏 南京 210007;2.解放军95972部队 甘肃 酒泉 735018)
近年来,利用电磁波及超声波进行复杂构件的内部损伤探测、评估安全性能及判断使用寿命是科研工作者感兴趣的一个课题。Lamb波是应用于该领域的一种常见电磁波。Horace在1917年发现了Lamb波,Worlton在 1961年将Lamb波应用于无损检测,随后,Lamb波的性质及在不同介质中的传输特性受到广大科学工作者的关注。Lamb波应用于无损检测的机理被无数科研工作者检验。在无损检测中超声波是另一种被广泛关注的波形,石立华等人对Mallat提出的匹配追踪法[1]进行简化,提出了基于波包提取的小波建模法[2],在使用电时域反射法对结构进行损伤反射定位仿真上取得了良好的效果。Demirli、Saniie[3]等人也用一种相似的建模方法来判断超声反射回波。从理论上和实验上验证了波包提取的有效性。
复杂构件内部成像技术的日趋成熟,促进了传感器及传感器阵列的发展。 目前 Ultrasonic probe[4-5]、LBU[6-7](laserbased ultrasonics)、PZT[8](Piezoelectric lead zirconate titanate elements deliver)、Interdigital transducer[9]、Optical fibre[10]被 广泛应用于无损检测中用来激励和采集信号。SMART Layer[11]和HELP Layer[12]是目前比较著名的两种传感器阵列。但两者均因昂贵的造价和使用动力的限制使得其不可能被大批量生产应用。因此,立足于日趋成熟的构件内部成像技术及传感器器材,设计可以批量化生产的传感器阵列具有十分重要的意义。
1 波包提取
采用WDT分析检测信号的基本思想是采用输入波包作为描述检测信号的基本单元,不同位置和尺度上输入波包的组合构成一种对检测信号的逼近[1]。如果把输入波包当做基波包,则被检测信号可看做是有不同时延、尺度、大小基波包的组合[13]。
根据这一思想,检测信号 x(t)可以用 N个时延时 τi(i=1,2,3,…,N)刻的基波包 h(t)的 N 个变形 hi(t)(hi(t))=h(tτi)逼近,如式(1)所示。

式中ai表示相应时延 τi时基波包的幅值系数,e(t)表示残余误差。时延个数可以根据检测信号的特征和对检测信号逼近的需要确定。该模型有如下两个优点:1)基波包唯一;2)时延数量远小于检测波形的采样点数目。这个建模过程就是提取不同时延时刻的基波包,不同时刻提取的波包,可以视作不同反射点反射到探测器的基波包的变形。对于不同时刻到达的波包,当前后衔接或者有重叠时,利用该方法有望将其分开,因此称为波包提取。
通过时域相关计算的方法,可以得到时延τi和幅值系数ai。 波包提取前设定 e0(t)=x(t),那么 ei(t)为第 i次分解后的残余误差,则有式(2):

用 h(t)与 ei(t)进行相关计算,按照相关值的大小进行逐步提取,时延 τi和幅值系 ai数可按式(3)、(4)计算达到:

采用 h(t)作为输入信号,采用式(5)输入形式:

那么检测信号看以看做是输入信号与物体结构作用后的信号,在很大程度上保留了输入信号的特征。
图1是一个检测信号波包提取示意图。x(t)是原始检测信号,按照到达时间的先后提取出5个基本波包,记作h1(t)~h5(t)。每个波包除幅度ai不同外,基本形式与输入信号波包h(t)相似,可近似表示如式(6):

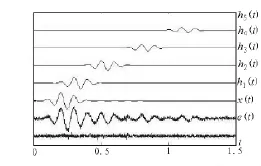
图1 波包提取示例Fig.1 Sketch map of wave distilled
图1中e(t)是由一些干扰噪声组成的残余误差,从图1中看其相对于提取的波包来说很小,也就是说提取出的波包能大体反映出原检测信号的特征,即原检测信号和提取波包的关系可以用式(7)来表达:

2 时间反演二维成像技术
2.1 传感器阵列的设计
SMART Layer采用传感器数目繁多,动力及成像算法处理复杂,HELP Layer仅采用4个传感器组成整列,极大的减少了动力需求及数据处理的复杂程度。进一步减少传感器数量到3个,使得成像需要的动力及算法进一步简化。
设计传感器阵列采用图2所示的组合方式,传感器O作为发射接收两用传感器,传感器A、B只接收不发射。3个传感器组成一个以传感器O为顶点的等腰直角三角形,传感器O中心到传感器A、B中心的距离为R。

图2 传感器阵列及波传播方向图Fig.2 Sensors array location and the direction of the wave’s propagation
在对构件进行探测时,仅考虑平面目标。假定探测器进行探测时置于探测物体的某一特定位置 (如物体的左下角),则整个探测区域可以根据探测器的位置由以A、B为垂足,垂直于坐标轴的两条虚线划分为4个区域,如图4所示。损伤点在每个区域的位置与探测器位置的关系如图4所示。在每一个区域内,损伤点和探测器的位置关系都遵循一定的几何关系,根据这种几何关系,可以精确定位损伤点的位置。
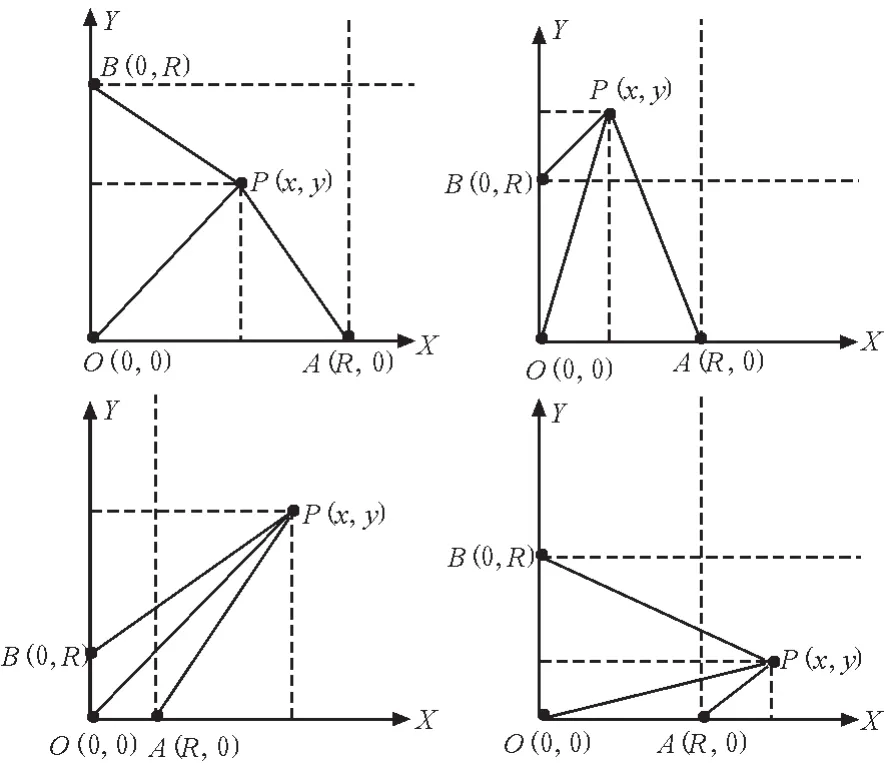
图3 损伤区域的划分及与传感器的关系图Fig.3 Relationship map between sensors array and the approximate location of the damage
2.2 物体中波速的测定
用传感器O发射,传感器A、B同时开始接收,记每次测量从传感器O发射到传感器A、B接收的时间差分别为Δτ1i,Δτ2i(i=1,2,…,N)则在物体中的波速用式(8)计算:

2.3 时间反演成像
传感器O、A、B同时开始工作,则传感器O发射一个信号后,传感器组接收到3个不同的检测信号,对3个检测信号分别进行波包提取。传感器O提取的波包为各损伤点反射波到传感器的时延,记作 Δτ0i(i=1,2,…,N),对传感器 A、B 而言,根据三角形三边关系两边之和大于第三边,则首先接收到的波包应该是由传感器O直接发射未经损伤点反射的信号(不考虑损伤点在OA、OB上的情况),可以直接滤掉。其次才是由损伤点反射经过不同的时延到达传感器的波包,分别记损伤点到传感器 A 波包的时延为 Δτ1i( j=1,2,…,N),到传感器 B 波包的时延为 Δτ2k(k=1,2,…,N)。
对于均匀介质,波从A点传播到B点所用的时间应该等于波从B点传播到A点的时间。因此,损伤点到传感器的时延可以看做是从传感器发射波形到损伤点所需要的时间。这个时间在二维成像聚焦过程可以通过波包的时延计算得到,因此称为虚拟时间,根据虚拟时间反演求损伤点位置的方法,称作虚拟时间反演聚焦二维成像。

图4 损伤点的理论定位示例Fig.4 Analytic location of the damage
因此,对于任一损伤点,如图5所示,分别以O、A、B为圆心,OP、AP、BP为半径做圆,则损伤点所在位置是3个圆的焦点。损伤点P的位置满足式(9):

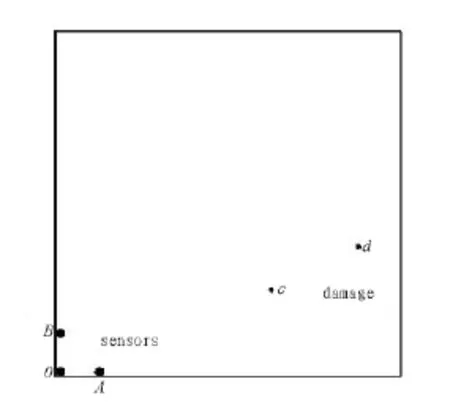
图5 模拟传感器及损伤点的位置Fig.5 Simulation location of the sensors array and the damage
在均匀介质中,路径可以由波在介质中的传播速度极其探测器接收到波包的延迟时间τ来表示,损伤点P到探测器O、A、B的距离可以分别表示为
将式(10)、(11)、(12)带入式(9)中,得损伤点精确定位公式(13):
3 数值仿真
数值仿真采用MATLAB软件编程完成,以检验上述成像算法的实际处理效果。仿真中设计的薄板结构模型为(0.8 m×0.8 m×0.004 m)的正方体。 在模型中(0.5 m,0.2 m)及(0.7 m,0.3 m)处各有一个直径为0.001 m的损伤,传感器O中心与传感器A、B中心的距离均为0.09 m。损伤点及传感器组阵列在模型中的位置如图5所示。
在模型中,所用传感器直径为20 mm,选用上文作为激励信号,频率为100 kHz。为了避免产生边界干扰,模型侧面都定为无限边界。
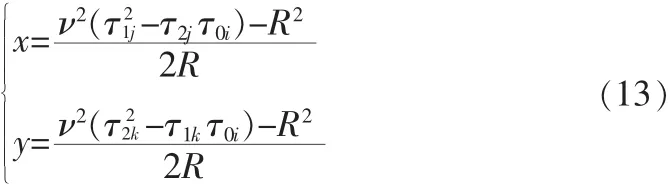
图6为传感器组阵列O、A、B各自接收到的检测信号,根据时延,分别对3个检测信号进行波包提取。各传感器接收到的检测信号的波包提取时延及波包分布图如图7所示。
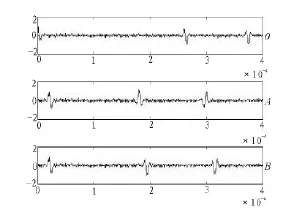
图6 传感器接收到的检测信号Fig.6 Accepting signal
根据提取的波包,以各传感器为圆心,反射后波包的传播距离为半径进行损伤点的定位成像,则定位的损伤点的位置分别为(0.493 5 m,0.197 8 m),(0.690 9 m,0.297 m)。 其成像精度约为98.7%。模拟成像结果如图8所示。
4 结 论
基于波包提取技术,考虑同一激励脉冲波形经损伤点反射后被不同位置上的传感器采集后的不同情形,对各个检测波形进行波包提取后根据时延进行虚拟反传递。从而精确定位损伤点的准确位置并进行成像。由于其成像分辨率只依赖于采样点频率和算法精度。因此从模拟仿真的结果来看,用该方法进行成像可以获得高分辨率。但仿真的条件过于理想化,因此该方法有待于进一步用实验进行检验。
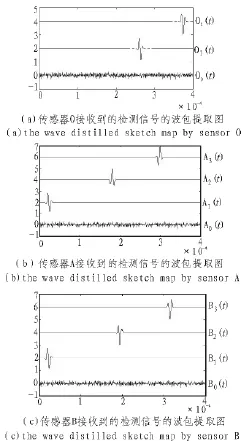
图7 检测信号的波包提取图Fig.7 Sketch map of wave distilled

图8 成像结果Fig.8 Result of the 2D imaging
[1]Mallat S,Zhang Z.Matching pursuit with time-frequency dictionaries[J].IEEE Trans.Signal Processing,1993,41(12):3397-3415.
[2]Demirli R,Saniie J.ModeI-based estimation of ultrasonic echoes partⅡ:analysis and algortms[J].IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control,2001,48(3):787-802.
[3]Demirli R,Saniie J.ModeI-based estimation of ultrasonic echoes part Ⅱ :nondestructive evaluation applications[J].IEEE Transactionson Ultrasonics, Ferroelectrics, and Frequency Control,2001,48(3):803-811.
[4]Degertekin F L,Khuri-Yakub B T.Lamb wave excitation by Hertzian contacts with application in NDE[J].IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control,1997,44(3):769-779.
[5]Castaings M,Cawley P.The generation,propagation,and detection of lamb waves in plates using air-coupled ultrasonic transducers[J].Journal of the Acoustical Society of America,1996,100(5):3070-3077.
[6]Valle C,Littles Jr J W.Flaw localization using the reassigned spectrogram on laser-generated and detected Lamb modes[J].Ultrasonics,2002,39(3):535-542.
[7]Gao W,Glorieux C,Thoen J.Laser ultrasonic study of Lamb waves:determination of the thickness and velocities of a thin plate[J].International Journal of Engineering Science,2003,41(2):219-228.
[8]Diamanti K,Hodgkinson J M,Soutis C.Damage detection of composite laminates using PZT generated Lamb waves,in:D.Balageas (Ed.)[C]//Proceedings of the First European Workshop on Structural Health Monitoring,2002:398-405.
[9]Monkhouse R S C, Wilcox P D, Cawley P.Flexible interdigital PVDF transducers for the generation of Lamb waves in structures[J].Ultrasonics,1997,35(1):489-498.
[10]Guemes A.Optical fibre sensors[M].Paris:Presentation on the First European Pre-Workshop on Structural Health Monitoring,2002.
[11]Lin M,Chang F K.The manufacture of composite structures with a built-in network of piezoceramics[J].Composites Science and Technology,2002,62(2):919-939.
[12]Lemistre M,Placko D,Balageas D L.Evaluation of the performances of the HELP layer SHM system using both DPSM simulations and experiments[C].Lancaster,DEStech Publications,2003:903-910.
猜你喜欢
电子制作(2019年23期)2019-02-23 13:21:12
测控技术(2018年6期)2018-11-25 09:50:10
测控技术(2018年9期)2018-11-25 07:44:40
测控技术(2018年8期)2018-11-25 07:42:08
系统工程与电子技术(2016年7期)2016-08-21 13:59:18
电测与仪表(2016年5期)2016-04-22 01:13:44
电测与仪表(2016年9期)2016-04-12 00:29:58
电测与仪表(2016年17期)2016-04-11 12:38:28
电测与仪表(2016年14期)2016-04-11 12:32:40
电测与仪表(2016年18期)2016-04-11 11:30:44