
柔性锥-杆式对接机构碰撞过程仿真研究
2012-09-18 02:33黄奕勇陈小前
上海航天 2012年3期
韩 伟,黄奕勇,张 翔,陈小前
(国防科学技术大学 航天与材料工程学院,长沙 410073)
0 引言
空间交会对接是指2个航天器在空间轨道上会合并在结构上连成一个整体的技术,它是实现航天器在轨装配、回收、补给、维修、航天员交换及营救等在轨服务的先决条件[1]。这类航天器对接基本属于硬对接。由于对接时撞击动能很大,不仅能引起航天器姿态发生大的变化,而且在某些接触部位还会产生较大的撞击载荷和局部变形。载荷过大会造成结构破坏,而变形太大将导致机构无法分离。因此,对接接触撞击载荷大小直接关系对接机构的强度设计乃至对接的成败[2]。为确保对接成功和航天器安全,需对撞击能量进行有效的缓冲和阻尼,这一功能常由缓冲阻尼系统承担。
目前用于空间对接的缓冲阻尼系统主要有机电混合式、并联式气-液和数控式3种[3]。其中俄罗斯研制的机电混合式缓冲阻尼系统应用最广,现在的国际空间站多采用有该类缓冲阻尼系统的对接机构。这种缓冲阻尼系统能控制捕获环6个自由度方向的运动,但其质量较大,可运动部件多达上百个,是一种典型的空间多环机构,动力学特性极其复杂。并联式气-液缓冲阻尼系统设计较易,但质量大、密封困难,液体体积对温度敏感,缓冲性能不稳定。数控式缓冲阻尼系统有良好的应用前景,但目前技术尚未成熟,在国外还处于原理样机研究和试验阶段。此外,这3种缓冲阻尼系统的服务对象主要是大型航天器,其体积、质量和功耗等均是中小型航天器所无法承受的。
中小型航天器普遍采用的锥-杆式对接机构的优点是结构简单、体积质量小,省去了大量的缓冲机械元件;柔性锥在轴向冲击作用下,依靠自身结构的大变形吸收和耗散大量碰撞时产生的冲击动能,充分发挥材料特性;经济性好,方案难度适当,可靠性佳;更具灵活性、适应性。为此,本文提出一种利用柔性锥的变形吸收撞击能量的缓冲系统方案,用ANSYS/LS-DYNA有限元分析软件对碰撞过程进行仿真,研究了柔性对接锥作为缓冲系统的性能对对接过程的影响。
1 物理模型与材料参数
当多个物体发生碰撞时,一般仅撞击体的初始运动速度可知,撞击体与目标体间撞击载荷规律和大小未知,这给撞击问题的理论研究带来了一定的困难。有关撞击现象的理论研究,主要是基于Hertz准静态接触理论或相关的试验[4]。随着计算机的发展,有限元法在撞击问题中的分析和模拟计算中的应用日益广泛[5-6]。
在ANSYS有限元软件中建立如图1所示的模型,其尺寸、质量等参数见表1。假设对接系统中主、被动航天器均为刚体,对接杆与主动航天器固连,柔性对接锥的底部外沿与被动航天器固连,2个航天器在空间环境中均可实现六自由度运动,即三自由度平移运动与旋转运动。

图1 对接机构模型Fig.1 Model of docking mechanism
定义被动航天器与柔性对接锥均为铝(线弹性)材料;主动航天器与对接杆为刚性材料,其材料参数为密度ρ=2740kg/m3,杨氏模量E=71.705GPa,泊松比μ=0.33。
主、被动航天器与对接杆均采用SOLID164单元。在ANSYS/LS-DYNA软件中,SOLID164单元是仅适用于显示动力分析的实体单元,每个节点有自由度9个。对SOLID164单元采用针对大变形问题十分有效的单点积分算法,并定义最小化零能模式进行沙漏控制。柔性对接锥采用SHELL163单元,SHELL163单元是仅适于显示动力分析的二维壳单元,每个节点有自由度12个[7-10]。本文中,对SHELL163单元采用速度较快的Belytschko-Tsay算法,剪切因子取5/6,沿厚度方向选取5个积分点。划分网格后的模型如图2所示。

表1 尺寸及质量特性Tab.1 Size and mass characteristics

图2 主动、被动航天器有限元模型Fig.2 FEM model of active and passive spacecraft
2 仿真与分析
设计算工况为:主动航天器x向的初始速度为0.1m/s,被动航天器y向的位置偏差为0.045m。网格LS-DYNA求解器算得的碰撞力如图3所示。由图可知:碰撞力随时间的变化是一个先增大后减小的过程,接触发生后约4ms时,碰撞力达到最大值606.34N,且z向的碰撞力非常小(与x、y方相比)。
主动航天器质心的速度与绕质心的角速度如图4所示。由图可知:主动航天器的速度变化主要发生在x、y向,z向的速度几乎未变;角速度z向的变化最明显,其大小由0rad/s增至0.184rad/s,另2个方向的角速度变化可忽略不计。
时刻0.1ms(接触刚刚发生)柔性对接锥各点的合速度与合位移云图如图5所示。由图可知:此刻与对接杆头部接触的区域运动最为明显和剧烈,远离接触的区域基本未受影响。由于接触区域的突然运动,该处会产生机械波,并向周围区域传播,直到被动航天器整体受到影响,如图6~9所示。

图3 碰撞力Fig.3 Impact force

图4 主动航天器质心速度v与绕质心角速度ωFig.4 Velocity and angular velocity of active spacecraft

图5 时刻0.1ms对接锥各点合速度与合位移云图Fig.5 Contour map of resultant velocity and displacement for docking cone at 0.1ms
令对接锥厚度h为0.3~10mm,主动航天器的初始x向速度和初始y向偏差仍分别为0.1m/s,0.045m,所得部分碰撞力如图10所示。由图可知:碰撞力峰值随着锥厚度的增大而增大,柔性锥(厚度<1mm)的碰撞力峰值较普通锥(厚度>4mm)减小50%以上。
碰撞力峰值与锥厚度的对数关系如图11所示。由图可知:碰撞力峰值与锥厚度的对数关系近似为一直线,其拟合式为

需要指出的是,式(1)为针对特定情形的碰撞关系,当柔性锥自身参数改变时,对数关系仍成立,但系数有所改变。
进一步考虑碰撞过程冲量I随对接锥厚度的变化关系。由冲量积分式
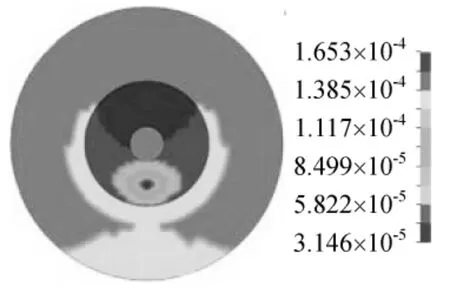
图8 碰撞7ms时对接锥合位移云图Fig.8 Contour map of docking cone resultant displacement at impact 7ms

图9 碰撞8ms时对接锥合位移云图Fig.9 Contour map of the docking cone resultant displacement at impact 8ms

图10 对接锥厚度对碰撞力的影响Fig.10 Effect of wall thickness of docking cone on impact force

图11 不同对接锥厚度的碰撞力峰值Fig.11 Maximum impact force under various wall thickness

可得各种锥厚度的冲量值,如图12所示。不同锥厚度时碰撞力峰值与碰撞持续时间的乘积如图13所示。由图可知:对接杆与柔性锥碰撞过程中,不同锥厚度的冲量及碰撞力峰值与碰撞持续时间的乘积变化较小。由此可得结论:对接锥厚度改变对碰撞冲量的影响很小;改变对接锥的厚度主要是通过延长碰撞持续时间、减小碰撞力峰值而达到缓冲对接冲击的效果。

图12 不同锥厚度的冲量值Fig.12 Impulse under various wall thickness

图13 不同锥厚度的碰撞力峰值与碰撞时间乘积Fig.13 Results of multiplying maximum impact force and contact time under various wall thickness
3 结束语
本文以中小型航天器普遍采用的锥-杆式对接机构为研究对象,对一种柔性对接锥缓冲系统方案进行了研究。用有限元分析软件ANSYS/LS-DYNA对该对接机构的对接过程进行了建模与仿真,结果表明:碰撞力峰值与锥厚度的对数关系近似为一直线。随着对接锥厚度的减小,碰撞力峰值迅速减小,碰撞持续时间显著增加。锥厚度对碰撞冲击的影响很大,碰撞力峰值减小、碰撞接触时间增加均可作为碰撞冲击得到缓冲的表现。与普通对接锥(厚度>4mm)相比,柔性锥(厚度<1mm)能减小碰撞力峰值50%多。
[1]陈小前,袁建平,姚 雯,等.航天器在轨服务技术[M].北京:中国宇航出版社,2009.
[2]曲艳丽,赵明扬,张崇峰.空间对接机构缓冲系统及其运动学建模[J].上海航天,2002,19(1):13-16.
[3]张崇峰.空间对接机构缓冲系统设计原理及优化设计方法的研究[D].哈尔滨:哈尔滨工业大学,1998.
[4]张大伟,田 浩,赵 阳,等.类杆锥式对接机构捕获动力学分析与参数设计[J].宇航学报,2008,29(6):1717-1722.
[5]崔乃刚,刘家夫,邓连印,等.太阳帆充气支撑管展开动力学分析[J].宇航学报,2010,31(6):1521-1526.
[6]卫剑征,苗常青,杜星文.充气太阳能帆板展开动力学数值模拟预报[J].宇航学报,2007,28(2):322-326.
[7]时党勇,李裕春,张胜民.基于ANSYS/LS-DYNA 8.1进行显示动力分析[M].北京:清华大学出版社,2005.
[8]白金泽.LS-DYNA3D理论基础与实例分析[M].北京:科学出版社,2005.
[9]赵海鸥.LS-DYNA动力分析指南[M].北京:兵器工业出版社,2003.
[10]LSTC.LS-DYNA user’s guide 7.0version[M].USA:LSTC,2001.
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
国际太空(2022年7期)2022-08-16
石油沥青(2021年5期)2021-12-02
军民两用技术与产品(2021年6期)2021-10-14
防爆电机(2021年3期)2021-07-21
文化创新比较研究(2020年7期)2021-01-13
南京大学学报(数学半年刊)(2020年1期)2020-03-19
国际太空(2019年9期)2019-10-23
北方工业大学学报(2019年5期)2019-03-30
国际太空(2018年12期)2019-01-28