基于NCUC-Bus现场总线的驱动信号转发装置的设计与实现*
2012-09-12 07:46:18周芳芳唐小琦谢星葵
组合机床与自动化加工技术 2012年2期
周芳芳,唐小琦,宋 宝,谢星葵
(1.华中科技大学机械科学与工程学院,武汉 430074;2.深圳华中数控股份有限公司,广东 深圳 518001)
基于NCUC-Bus现场总线的驱动信号转发装置的设计与实现*
周芳芳1,唐小琦1,宋 宝1,谢星葵2
(1.华中科技大学机械科学与工程学院,武汉 430074;2.深圳华中数控股份有限公司,广东 深圳 518001)
结合自主研发的HCUC-Bus现场总线协议,设计了一种可靠性高、通信速率高、控制简单的驱动信号转发装置,采用PHY芯片和FPGA共同作用的硬件平台,结合模块间的信号转换要求和现场总线的特点,将“脉冲量或模拟量接口”的伺服/主轴驱动器应用于现场总线的通信方式,解决了“脉冲量或模拟量接口”驱动器通信速率低、控制复杂,且不适合长距离传输等问题。
驱动信号转发装置;NCUC-Bus现场总线;数控系统;现场可编程门阵列
0 引言
随着数控机床高速高精加工的迅速发展,现场总线技术在数控系统中的运用越来越广泛。目前大部分国外数控机床都应用现场总线技术,国内也在积极开展这方面的研究与应用,其中基于数控联盟总线(NC Union of China Field Bus,NCUC-Bus)的数控系统产品已经崭露头角。NCUC-Bus协议是应用于数控系统的强实时现场总线协议,采用PHY+FPGA结构模式,整个协议的处理都在FPGA中实现,能够很好地满足包含运动控制的工业自动化控制的强实时、高可靠性要求,是发展高速、高精的数控系统必不可少的通信方式。
目前大部分国产数控装置与驱动器之间采用的是脉冲量或模拟量的通信方式,这种通信方式速率低、控制复杂,且不适合长距离传输,不能满足数控系统高速高精的通信要求,成为数控系统发展的瓶颈。
本文针对脉冲量或模拟量通信存在的问题,结合NCUC-Bus现场总线强实时、高可靠性的特点,设计了一种基于NCUC-Bus现场总线的驱动信号转发装置,将信号和协议的处理在FPGA中实现,并结合FPGA外围电路的设计,将脉冲量或模拟量通信方式转换成现场总线通信方式,解决了“脉冲量或模拟量接口”的驱动器通信方式速率低、控制复杂,且不适合长距离传输的问题[1-3]。
1 基于NCUC-Bus现场总线的驱动信号转发装置的硬件平台
NCUC-Bus网络是一种主-从式的现场总线网络,环路中拥有一个主站设备(主站)和多个从站设备(从站)。主站与从站依次连接,形成环形或线形网络拓扑结构,主站可以发送和接收数据,从站是数控系统中的驱动器、PLC、I/O板等设备[3-4]。
NCUC-Bus现场总线通信网络可以将现场总线接口的驱动器直接作为从站,进而控制电机,这类的驱动器都是基于NCUC-Bus现场总线开发的数控系统产品,而市面上大部分的“脉冲量或模拟量接口”的驱动器不能直接串入NCUC-Bus现场总线的网络中,基于NCUC-Bus现场总线开发的驱动信号转发装置,将“脉冲量或模拟量接口”的伺服/主轴驱动器串入基于NCUC-Bus现场总线的网络,如图1所示。
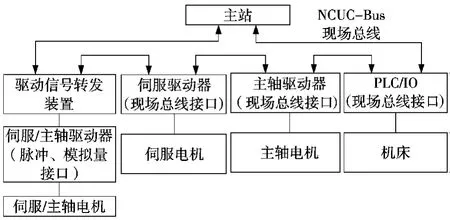
图1 基于NCUC-Bus现场总线的驱动信号转发装置的硬件平台
该驱动信号转发装置将基于NCUC-Bus总线驱动的输入/输出信号转换成“脉冲量或模拟量接口”驱动器可以接收的输入/输出信号,将数控装置与驱动器之间的通信方式转换成现场总线通信方式,提高数控系统的强实时和高可靠性,满足数控系统高速高精的通信要求。
2 基于NCUC-Bus现场总线的驱动信号转发装置的总体结构
基于NCUC-Bus现场总线的驱动信号转发装置利用FPGA设计周期短,开发费用低、风险小等优点,将信号转发器的信号处理在FPGA中实现,并结合FPGA的外围电路和接口实现驱动信号转发功能。该驱动信号转发装置设置了两个高密36接口,可以与两台驱动器连接,同时控制两台电机运行。根据驱动信号转发装置功能的实现,将其划分为以下六个功能模块,如图2所示。
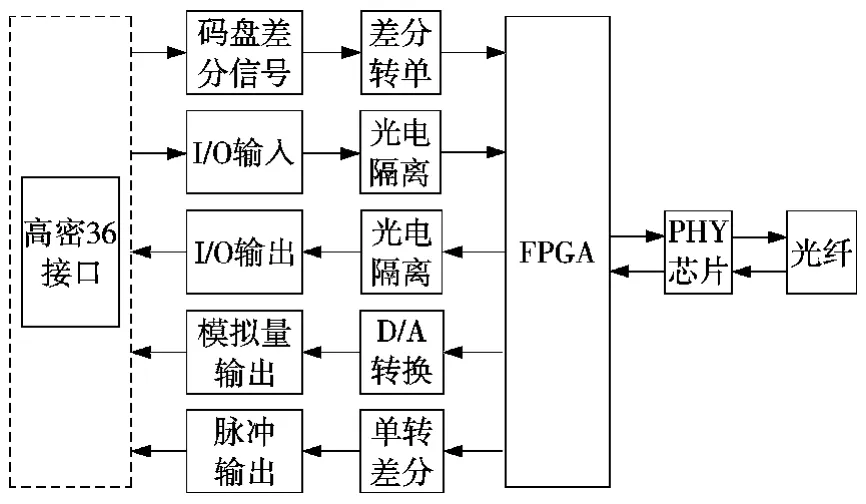
图2 基于现场总线的驱动信号转发装置的总体结构
该驱动信号转发装置的六个功能模块包括:2路电机编码反馈信号输入,码盘反馈信号可以是绝对式或增量式,电机的码盘反馈信号经过保护滤波、差分转单、电平转换处理后输入到FPGA;12路数字量输入和12路数字量输出,都需要经光电隔离和电平转换后与FPGA连接;2路脉冲指令输出,经现场总线网络传输的脉冲指令,由 FPGA进行转换、位置环控制及选择处理,通过单转差分转换为脉冲串和脉冲方向,对电机进行位置控制;2路模拟量输出,经现场总线网络传输的位置指令,由FPGA采集进行转换及选择处理,通过D/A转换芯片和电平转换为模拟量输出,对电机进行速度控制;光纤通信接口,NCUC-Bus现场总线的通信接口采用PHY芯片和光纤收发器来实现;FPGA芯片,FPGA是该驱动信号转发装置的核心部分,FPGA提供现场总线协议的实现、信号的转换及位置环的实现。该装置使用的FPGA芯片为Altera公司的cyclone II EP2C80208芯片,通过Quartus II8.0进行综合、时序分析及布局布线。
基于NCUC-Bus现场总线的驱动信号转发装置通过这六个功能模块的相互连接和配合,将基于NCUC-Bus总线驱动的输入/输出信号(包括位移/速度指令、编码反馈信号以及相关输入/输出)转换成“脉冲量或模拟量接口”驱动器可以接收的输入/输出信号,实现数控装置与驱动器之间的现场总线通信。
3 基于NCUC-Bus现场总线的驱动信号转发装置的功能实现
驱动信号转发装置功能主要在FPGA中实现。FPGA的硬件程序包括总线上传/下载单元、码盘信号转换单元、位置环控制单元、选择单元、D/A控制单元、脉冲转换单元、I/O转换单元。如图3所示。
输入到FPGA中的码盘反馈信号和I/O输入信号经过码盘信号转换单元和I/O转换单元处理后,由总线上传/下载单元上传到现场总线中。
总线上传/下载单元经光纤接口下载脉冲指令、速度指令、I/O输出指令。下载的脉冲指令可以通过脉冲转换单元输出,也可以通过位置环控制单元处理后转换为速度指令;直接下载的速度指令和经位置环控制单元处理后的速度指令通过选择单元,选择其中一种类型,经D/A控制单元输出;下载的I/O输出指令经I/O转换单元输出。
选择单元可选择模拟量的两种类型,也就是速度控制的两种应用模式:第一种应用模式,是实现信号转发的功能,把网络的速度指令直接通过D/A转换为模拟量输出;第二种应用模式,是在FPGA中实现位置环的控制,将网络中的脉冲指令和码盘的反馈信号通过位置环及D/A转换为模拟量输出,位置环的控制流程如图4所示。

图4 位置环控制流程图
位置环的实现是将主站提供的脉冲指令和码盘的反馈信号在FPGA进行实时的控制处理,最终转换成模拟量形式对电机进行速度控制。前馈因子和位置环比例系数都可以根据具体的电机控制过程来确定,具体实现过程如图5所示。
4 实验与仿真
基于NCUC-Bus现场总线的驱动信号转发装置可以用于电机的位置控制和速度控制,速度控制具有两种应用模式。每种控制方式和应用模式都进行了实验和仿真测试,均符合设计要求。

图5 位置环实现过程的逻辑框图
4.1 基于NCUC-Bus现场总线的驱动信号转发装置的位置控制
将基于NCUC-Bus现场总线的驱动信号转发装置用于位置控制时,主站可以设置位置指令的值,经NCUC-Bus现场总线传输后,由光纤接口下载到FPGA中转换成脉冲串和脉冲方向,通过电平转换和单转差分电路,从高密36接口输出。输出的脉冲信号作为驱动器的控制信号,以脉冲的形式控制伺服驱动器的位置。
实验仿真时,主站设置第一路位置指令的值为200,第二路位置指令的值为-200,意义是1ms发送200个脉冲,第一路位置指令的方向为正,第二路位置指令的方向为负。通过该驱动信号转发装置信号处理后,脉冲串是频率为200kHz的方波,第一路脉冲方向为正,输出4V左右的电压,第二路脉冲方向为负,输出0V左右的电压。实验过程中用Quartus软件的SignalTap观察两路位置指令经信号转换后的脉冲输出的仿真图形,如图6所示。并用示波器观测第一路脉冲指令在单转差分电路处理后脉冲串的差分信号和脉冲方向的差分信号,即CP±和DIR±,如图7所示。
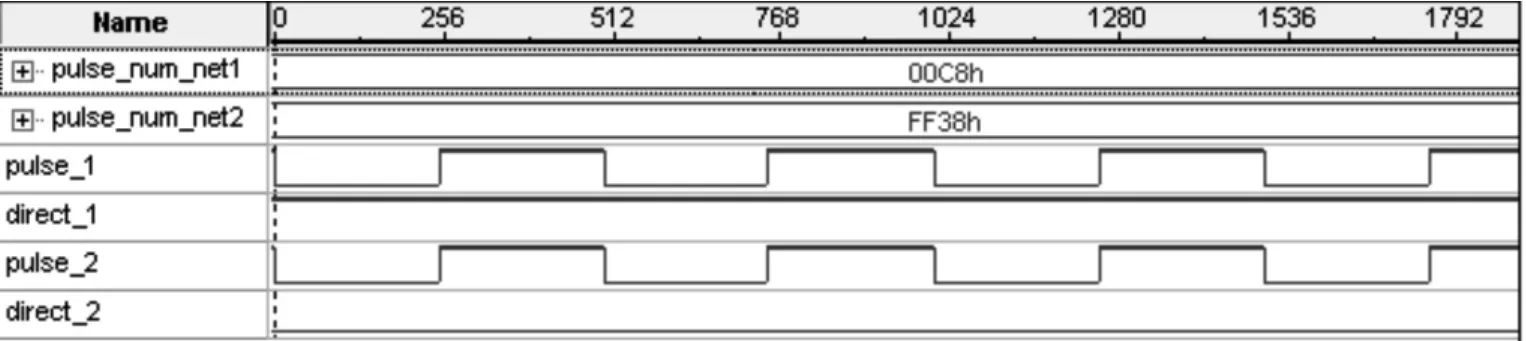
图6 两路位置指令脉冲输出的仿真图形
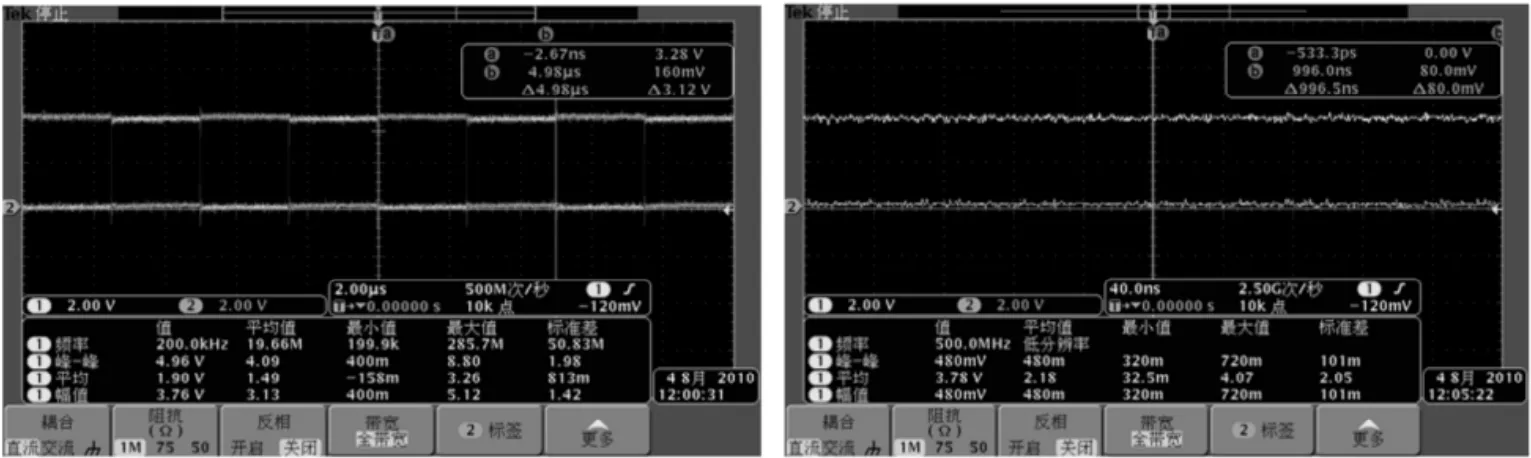
图7 脉冲串及脉冲方向的差分信号
4.2 基于NCUC-Bus现场总线的驱动信号转发装置的速度控制
将基于NCUC-Bus现场总线的驱动信号转发装置用于速度控制时,主站可以设置速度指令的值,经NCUC-Bus现场总线传输后,由驱动信号转发装置转换为模拟量输出,对电机进行速度控制。速度控制具有两种应用模式:第一种应用模式,该驱动信号转发装置,把主站设置的速度指令直接通过D/A转换为模拟量输出;第二种应用模式,是在FPGA中实现位置环的控制,将主站设置的位置指令和码盘反馈信号通过位置环控制,转换成速度指令,再通过D/A转换为模拟量输出。
(1)第一种速度控制模式
该驱动信号转发装置应用第一种速度控制模式控制电机,通过FPGA的JTAG接口,用Quartus软件的SignalTap观察的FPGA运行的仿真图,da_spd1及da_spd2是主站设置的两路速度指令十六进制显示的数值,经FPGA处理,转换成D/A转换芯片的控制信号,包括sclk、sync_n、clr_n、din、ldac_n,这5 个控制信号经电平转换电路,输入到D/A转换芯片AD5623,转换为模拟量输出。具体仿真图如图8所示。
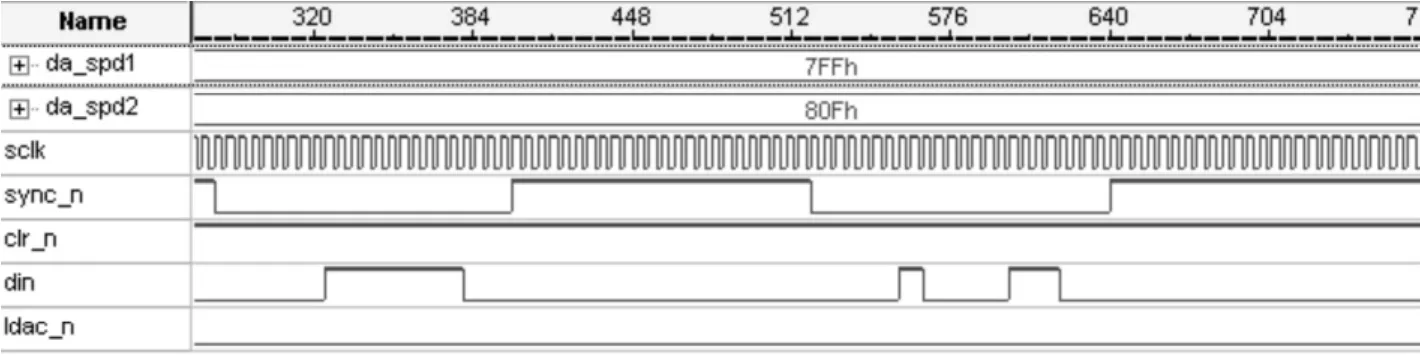
图8 基于第一种速度控制模式下的仿真图
(2)第二种速度控制模式
该驱动信号转发装置应用第二种速度控制模式控制电机,通过FPGA的JTAG接口,用Quartus软件的SignalTap观察的FPGA运行的仿真图,pulse_num_net1是主站设置的位置指令,设置为100,data_out_num1是码盘反馈信号,这两个信号经FPGA的位置环处理后,转换为速度指令da_pos1,同样经FPGA处理,转换成D/A转换芯片的控制信号,包括sclk、sync_n、clr_n、din、ldac_n,这 5 个控制信号经电平转换电路,输入到D/A转换芯片 AD5623,转换为模拟量输出。具体仿真图如图9所示。
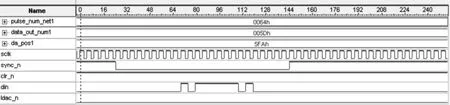
图9 基于第二种速度控制模式下的仿真图
5 结束语
本文所提出的基于NCUC-Bus现场总线的驱动信号转发装置,采用PHY芯片和FPGA共同作用的硬件平台,并在FPGA外围电路的配合下,将基于NCUC-Bus总线驱动的输入/输出信号(包括位移/速度指令、编码反馈信号以及相关输入)转成传统伺服可以接收的输入输出信号,并在驱动信号转发装置中实现电机位置环的控制,增加了驱动器的控制效率,实现了将“脉冲量或模拟量接口”的伺服/主轴驱动器应用于现场总线的通信方式,解决了“脉冲量或模拟量接口”驱动器通信速率低,控制复杂,且不适合长距离传输等问题。
[1]张向利.基于以太网的数控系统现场总线技术研究[D].武汉:华中科技大学,2009.
[2]顾超,宋宝,唐小琦.总线式数控系统中PCI接口控制器的FPGA实现与应用[D].计算机应用,2011(3):279-281,297.
[3]数控系统现场总线(NCUC-Bus)数据链路层规范和服务定义(草案).
[4]殷哲波.基于FPGA的数控系统现场总线技术的研究[D].武汉:华中科技大学,2009.
[5]李正军.现场总线及其应用技术[M].北京:机械工业出版社,2005.
[6]Pinto,R.;Rufino,J.;Almeida,C.High availability in Controller Area Networks.IEEE EUROCON 2011-International Conference on Computer as a Tool.2011.
[7]赵艳华.基于Quartus II的 FPGA/CPLD设计与应用[M].北京:电子工业出版社,2009.
[8]Yong Han Jeon,Jin Ho Kim,Suk Hyun Seo,et al.Design of configurable network controller between Ethernet and EtherCAT.Proceedings 2010 International Conference on Control,Automation and Systems.2010.
Implementation of Driving Signal Transmiter Based on Fieldbus NCUC-Bus
ZHOU Fang-fang1,TANG Xiao-qi1,SONG Bao1,XIE Xing-kui2
(1.School of Mechanical Science and Engineering,HuaZhong University of Science and Technology,Wuhan 430074,China;2.Shenzhen Huazhong Numerical Control co.,ltd,Shenzhen Guangdong China)
Combined with the self-developed fieldbus NCUC-Bus protocol,a driving signal transmiter which is reliabile,high speed and easy control was designed.FPGA and the FHY chip were chosen to realize the hardware platform.And according to the requirement of the signal transition among modules and the features of the fieldbus,the servo/spindle driver which have the interface of pulse or analog was used in the communication of the fieldbus,and solved the problems of low speed,complicate control,and bad performance.
driving signal repeaters;fieldbus NCUC-Bus;numerical control system;field programmable gata array
TH16;TG65
A
1001-2265(2012)02-0088-04
2011-07-25
国家自然科学基金(20100192);国家自然科学基金(50875099);“高档数控机床与基础制造装备”科技重大专项(2010ZX04010-041)
周芳芳(1988—),女,湖南邵东人,华中科技大学硕士生,主要研究方向为数控技术、现场总线技术,(E-mail)zhouff5@126.com。
(编辑 赵蓉)
猜你喜欢
电脑爱好者(2020年6期)2020-05-26 09:27:33
测控技术(2018年12期)2018-11-25 09:37:42
制造技术与机床(2017年5期)2018-01-19 02:49:16
制造技术与机床(2017年6期)2018-01-19 02:41:14
制造技术与机床(2017年7期)2018-01-19 02:30:01
制造技术与机床(2017年9期)2017-11-27 02:14:31
光学精密工程(2016年5期)2016-11-07 09:06:04
电子制作(2016年21期)2016-05-17 03:53:12
电测与仪表(2015年11期)2015-04-09 11:46:30
上海电机学院学报(2015年3期)2015-02-28 14:29:52