基于FPGA和交流步进控制的永磁同步电机伺服系统
2012-08-28 06:50李金松
电机与控制应用 2012年7期
张 坤, 李金松, 张 琳, 董 砚, 郑 易
(1.河北工业大学控制科学与工程学院,天津 300130;
2.河北工业大学信息工程学院,天津 300401)
基于FPGA和交流步进控制的永磁同步电机伺服系统
张 坤1, 李金松1, 张 琳2, 董 砚1, 郑 易1
(1.河北工业大学控制科学与工程学院,天津 300130;
2.河北工业大学信息工程学院,天津 300401)
以永磁同步电机(PMSM)为控制对象,以现场可编程门阵列(FPGA)为控制核心器件,对交流步进控制方式应用于伺服系统的场合,进行了理论与仿真研究,最后经实际试验验证。仿真与试验结果表明,应用交流步进控制方式的PMSM伺服系统具有良好的速度与位置可控性,能够满足现代工业对伺服系统的高要求。同时,研究结果也为PMSM在高性能控制场合下的应用提供了参考。
现场可编程门阵列;交流步进控制;永磁同步电机;伺服系统
0 引言
永磁同步电机(Permanent Motor Synchronous Motor,PMSM)具有高功率密度、高效率、高功率因数、高转矩惯量比等优点,特别是具有高剩磁密度、高矫顽力、高磁能积和现行退磁等优异性能的钕铁硼稀土永磁材料的出现和相应的工艺技术的发展,使得PMSM性能不断提高。
随着现代工业的发展,一些领域需要电机与外界进行通信,还有一些领域需要多台电机协同控制,这就要求核心控制器件具有快速且实时的处理能力。基于现场可编程门阵列(Field Programmable Gate Array,FPGA)的电机控制得到越来越多的关注。FPGA实现软件与硬件、高速与灵活性的完美结合,此外,其设计周期短,可移植性好,控制器接口灵活,计算速度更快,易于实现电机控制专用数字芯片。
交流步进控制是把位置控制、速度控制和伺服控制等不同的传动控制方式有机地结合起来,使同步电机的气隙磁动势由连续的旋转磁场变为离散的步进磁场。对离散的步进磁动势进行控制,可以获得良好的速度控制,还可进一步取得精确的位置控制,从而形成高性能的交流传动控制系统。它打破了连续与离散、速度与位置、旋转与步进的严格界限,形成了一种统一的交流步进控制理论[1]。
1 交流步进控制与定位控制
1.1 交流步进控制理论
同步电机的步进控制中心思想是将电机的定子电流离散为bH步。每一步对应一个大小固定和位置步进的定子磁动势,与转子磁动势构成步进角,从而产生步进的复位转矩,进而将转子锁定在一个特定的位置上[2]。
如果将同步电机的定子磁势由旋转磁势离散为步进磁势。则定子气隙中所停靠的位置也就是这种电机步进运动时能够提供的定位点数,即电机的每步数。
当PMSM定子绕组通以三相对称正弦电流ia、ib、ic时:
式中:Im——通入的三相电流峰值。
将PMSM三相磁动势进行合成可知,三相绕组产生的气隙磁动势是一个旋转磁动势,其幅值是相脉振磁动势幅值的1.5倍:

式中:Fa——相脉振磁动势的幅值。
若按电角度计算,旋转磁动势在空间运行的电角度θ和绕组中电流在时间上经历的电角度永远相等,即旋转磁动势每秒的转速为


式中:f——定子电流的频率;
pm——电机的磁极对数。
假设对于三相定子绕组,如果不通入连续正弦电流,而是输入下列对称离散电流:

为了形象说明磁动势的步进作用,取环形分配器的循环拍数bH=12,并绘出步进磁动势在复数平面中的12个位置,以A相绕组的轴线为实轴,如图1所示。当k=0时,∑F和Re轴同相,因为ia=Im,ib=ic=-0.5Im,∑F(0)=1.5Fa。在图1中,记作∑F(0)。同样可以得出另外11个磁动势矢量,如k=6时,ia=-Im,ib=ic=0.5Im,∑F(6)=1.5Fa·eiπ,其他可依次求出。
式中:im——通入相电流的峰值;
bH——环形分配器的循环拍数;
k——主令脉冲的拍数。
将输入电流的一个周期分为bH份(bH为正整数),对于三相绕组,为保证三相电流互差2π/3和各相正负半周对称,最好取bH是6的整数倍。k为主令脉冲拍数,它等于任意正整数。由此得到的气隙磁动势将是一个步进磁动势:
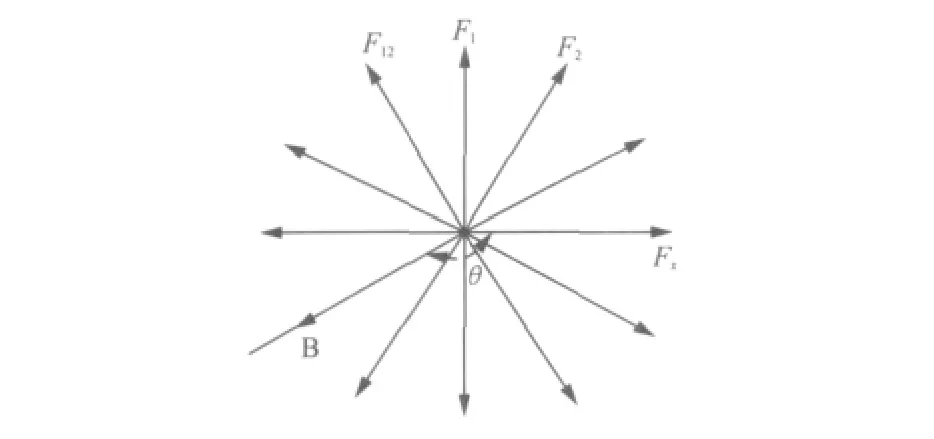
图1 三相绕组的步进磁动势
1.2 定位控制方法
本伺服控制系统为了实现高精度的定位控制,将速度变化分为三段,即起动、稳速、降速及制动,如图2所示。
第一阶段(0~t1)是升速过程,在本阶段,给定子超前转子3步的电流矢量,并通以大的电流矢量,这样电机将以最大的加速度加速,使电机在最短的时间内达到恒定的转速。当电机转速到达恒定的转速之后将进入第二阶段。
第二阶段(t1~t2)为恒转速运行阶段,本阶段需要把电机的速度控制在一个恒定值,当转速低于设定转速时,给定子加超前的电流矢量,当速度高于设定转速时给定子滞后的电流矢量,这样就能尽量使电机速度控制在恒定的转速。
第三阶段(t2~t3)为减速阶段,在本阶段中,电机定子的给定电流滞后3步转子的电流矢量,这样电机就可以以最大减加速度进行降速,当电机运行到设定的脉冲数后,电机将进入低速运行阶段。
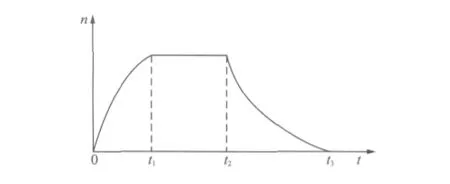
图2 三段速度定位示意图
2 仿真模型与试验平台搭建
2.1 仿真模型搭建
本伺服系统的MATLAB/Simulink仿真模型主要包括以下几部分:电流滞环PWM逆变器模块、PMSM模块、电机测量模块、MATLAB功能函数模块等几部分组成。其工作原理为通过电机测量模块获得电机转子的位置和速度参数,并将其反馈到MATLAB功能函数模块,经过MATLAB函数模块和逆变模块将连续正弦电流离散化,形成步进电流。反馈部分通过测量电机的实际电流值与给定电流相比较,用电流滞环模块实现电机的自动控制,从而获得良好的动态特性和定位特性。
2.2 试验平台搭建
系统电路主要包括:控制电路部分和功率放大部分,其中控制电路部分包括FPGA及其外围电路,电流信号的电压提升电路,位置检测电路,显示按键驱动电路;功率放大部分的核心模块为三菱公司的智能功率模块PM15RSH120,主要包括:多组独立电源,触发信号驱动电路,电压、电流采样电路,保护电路。
2.2.1 控制部分电路设计
全数字驱动控制器的核心芯片采用Xilinx公司生产的Spartan-3E芯片XC3S500E。其主要功能是快速实时地进行信号处理,包括接受键盘输入信号、电流采样信号、位置反馈信号及电路保护信号,综合以上信号的结果在适当时候输出适当的IPM驱动信号,从而实现对PMSM的精确控制。控制部分结构图如图3所示。
2.2.2 功率部分主电路设计
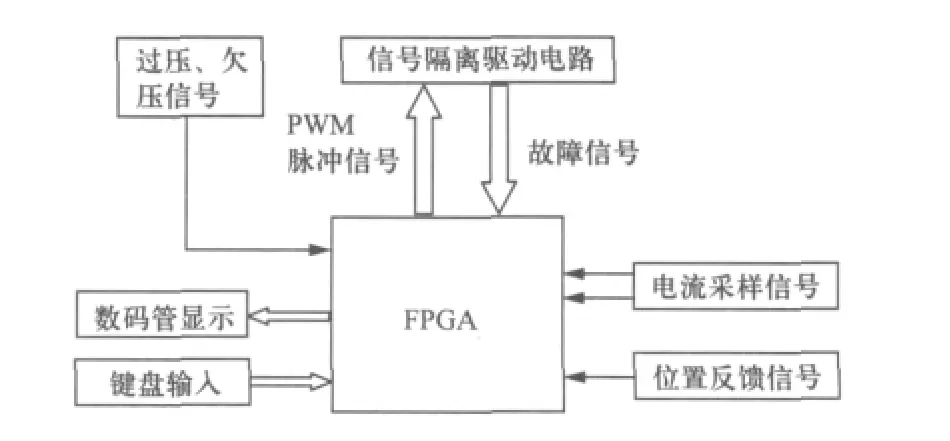
图3 控制部分结构图
驱动控制器的主电路由整流电路、直流中间电路和逆变电路三部分以及有关的辅助电路组成。主电路原理图如图4所示。
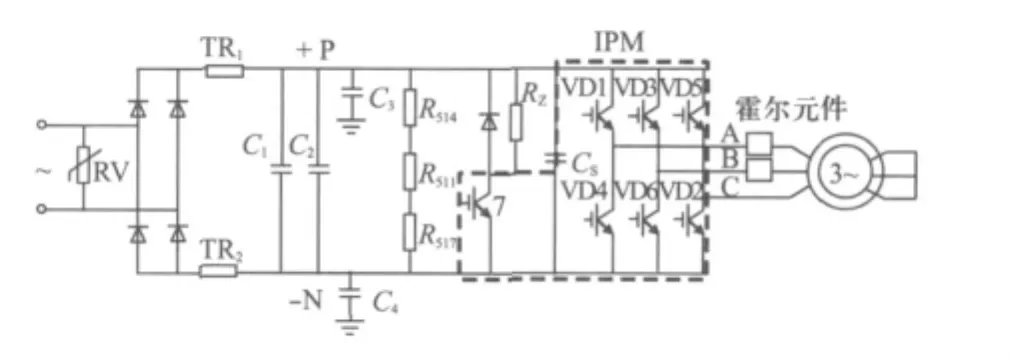
图4 功率放大主电路
本系统选用的“智能功率模块”(IPM),即三菱电子的集成IPM PM15RSH120智能功率模块,不同于一般功率器件,是一种新型的电力电子模块,将功率变换、栅极驱动和保护电路集成一体作为逆变器。其功率模块的主要特点如下:采用低饱和压降、高开关速度、内设低损耗电流传感器的IGBT功率器件;采用单电源、逻辑电平输入、优化的栅极驱动;提供系统故障输出,向系统控制器提供报警信号。
3 仿真与试验
3.1 仿真结果
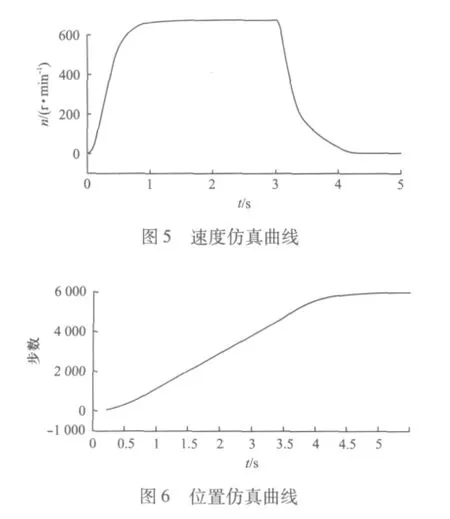
电机在高速运行时,由于转动部分具有相当大的动能,起动和制动阶段都需要有一定的加速和减速时间,以便用有限的最大电磁转矩去起动和制动。步进传动的突跳过程就需要一定的升速时间,在这段时间内转矩角逐渐增大,转子转速逐渐升高,只要在转子转速升高到等于步进磁动势的平均转速时,电机的动态角误差还没有达到允许的最大值,电机就不会失步。
速度及位置仿真曲线分别如图5、图6所示。
3.2 试验结果
本文以美国KOLLMONGEN公司生产的1.6 kW的M205B型永磁同步伺服电机为研究和控制对象。
在上面提到的三段速度运行曲线中,为获得较大的起动、制动转矩,给电机通以不同大小的电流矢量。在第一和第三阶段,即升速和降速定位阶段通以两倍额定电流,这样电机就会在这段时间内具有很大的加速度,使电机在尽量短的时间内达到规定要求,在第二阶段给电机通以额定电流的电流矢量。
A相定子电流跟随曲线如图7所示。
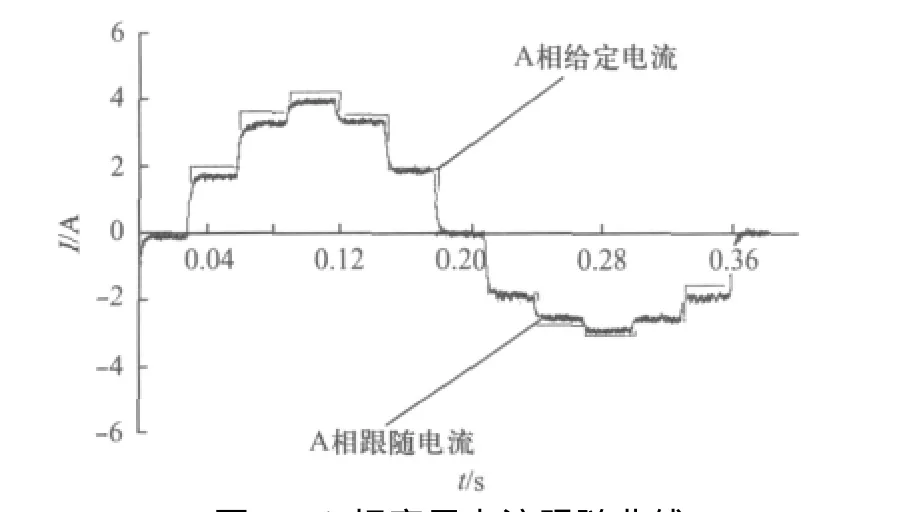
图7 A相定子电流跟随曲线
三段速度试验曲线如图8所示,当t=2.5 s时,开始第一阶段即升速阶段;第二段是恒速阶段;第三段为降速定位阶段。
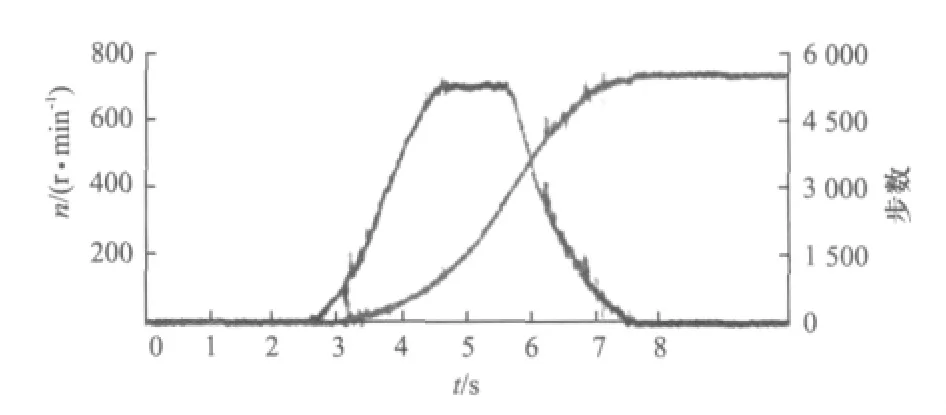
图8 三段速度位置试验曲线
4 结语
通过对基于FPGA和矩角控制下的PMSM伺服控制系统的仿真与试验可知,运用FPGA技术与矩角控制理论的PMSM伺服系统,相对于传统控制方法下的系统,具有良好的动态特性与定位特性,可以满足现实中对于速度及定位精度双高要求的场合,同时为PMSM在高性能控制场合下的应用提供了参考。
[1]孙鹤旭.交流步进传动系统[M].北京:机械工业出版社,1996.
[2]郑泽东,李永东.永磁同步电机伺服控制系统的研究现状及发展[J].伺服控制,2008(12):20-22.
[3]薛小刚,葛毅敏.Xilinx ISE 9.X FPGA/CPLD设计指南[M].北京:人民邮电出版社,2008.
[4]林飞,杜欣.电力电子应用技术的MATLAB仿真[M].北京:中国电力出版社,2009.
[5]陈伯时,谢鸿鸣.交流传动系统的控制策略[J].电工技术学报,2002,15(5):11-15.
Design of Servo-System with Permanent Magnet Synchronous Motor Based on FPGA and AC Stepper Control
ZHANG Kun1,LI Jinsong1,ZHANG Lin2,DONG Yan1,ZHENG Yi1
(1.School of Control Science and Engineering,Hebei University of Technology,Tianjin 300130,China;
2.School of Information Engineering,Hebei University of Technology,Tianjin 300401,China)
The simulation and theoretical study on the servo-system based on permanent magnet synchronous motor and FPGA in the mode of AC stepper control were conducted.The simulation and the experiment results showed that PMSM with application of AC stepper control has a good ability of speed and position control,it can satisfy the high requires in modern industry.Mean while,the study results also provided the reference for the application of PMSM in high-performance occasions.
field programmable gata array(FPGA);AC stepper control;permanent magnet synchronous motor(PMSM);servo-system
TM 351
A
1673-6540(2012)07-0041-04
2012-03-08
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
测控技术(2018年12期)2018-11-25
光学精密工程(2016年3期)2016-11-07
北京航空航天大学学报(2016年4期)2016-02-27
弹箭与制导学报(2015年1期)2015-03-11
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28