主动式波浪补偿控制技术仿真研究
2012-08-11 01:48:04卢东庆
船舶 2012年6期
卢东庆 宋 飞
(1.海军91878部队 湛江524031;2.海军工程大学 船舶与动力学院 武汉430033)
0 引 言
舰艇在海洋环境下要进行安全有效的作业任务,操作装备需要具备波浪补偿功能。通过波浪补偿,可以大大增强海上作业的安全性、高效性和可靠性。目前国内外研究较多的是主动式海浪补偿技术,该补偿技术的基础是对船舶未来有效时间内的姿态进行可靠预报[1]。模型预测控制策略大多采用滚动时域控制,这类控制策略的缺点是:当过程时间常数较大时,模型参数较多且计算量大,因此只适合开环稳定的控制对象[2-3]。 自回归模型(AR 模型)、广义预测控制(GPC)[4-5]参数模型则为最小化模型,参数少,计算量大大减少,可及时修正参数变化产生的预测模型误差,鲁棒性强,可用于波浪补偿系统的预测控制。
1 主动式波浪补偿系统组成
1.1 船舶运动姿态数据采集模块
主要是通过加速度传感器和倾角传感器采集船舶的六自由度信号,经过一定的信号处理和数值计算,可得到重物支撑定滑轮的升沉信号。本文采用的捷联式测量系统是将运动物体上点的瞬时加速度投影到惯性坐标系中,然后通过对惯性坐标系下加速度的积分求出位移[6]。
1.2 数据处理模块
主要通过数字低通滤波器消除零漂、零偏、高频噪声等对加速度传感器输出信号的影响。对加速度积分可得到速度值,对该速度值再次积分,即可得到位移量,再将计算值作为新的历史数据存入计算机。
1.3 控制单元模块
由数据处理模块得到的升沉量,利用预测算法对舰船下一时刻的运动进行预报,预报值由位移量换算成所需脉冲数传送至PLC;再由PLC驱动步进电机,进而对数字液压补偿缸进行控制。
1.4 动作执行模块
主要由绞车、数字液压补偿缸、动滑轮、定滑轮、钢丝绳索等组成。绞车用于收放绳索,数字液压补偿缸用于补偿波浪引起重物的升沉,见图1。

图1 主动式波浪补偿装置原理图
2 AR模型控制策略
波浪运动补偿液压控制系统是一个大惯量系统,存在滞后问题且滞后时间极短。因此,对升沉位移进行实时预报时,需考虑预报算法的计算速度。时间序列预报模型利用船舶或海浪的历史数据来预测船舶运动的未来值,算法简单且易于应用[7]。采用AR模型来进行极短时预报的计算量较小,只需单一信息源就可以实现在线预报。实船使用时,对设备要求相对较少也较容易实现[8]。
2.1 AR升沉预测模型
由于海况经常变化,采用固定的模型参数将有较大误差,不能满足系统要求,因此采用AR模型在线建模对舰船广义升沉位移进行实时多步预报是一种可行的方法。当所采集到的历史数据个数N≥2M时,启动算法。具体计算过程为:在t时刻,AR模型进行参数估计,然后用AIC准则定阶,得到AR预报模型。从t+1时刻起,每一时刻引入新的广义升沉数据后,对AR模型的参数进行在线递推估计。

图2 AR模型在线预报流程
2.2 仿真结果分析
采用表1中的数据,其中第1~25个数据用于模型参数辨别,26~30个数据用于检验预报效果。
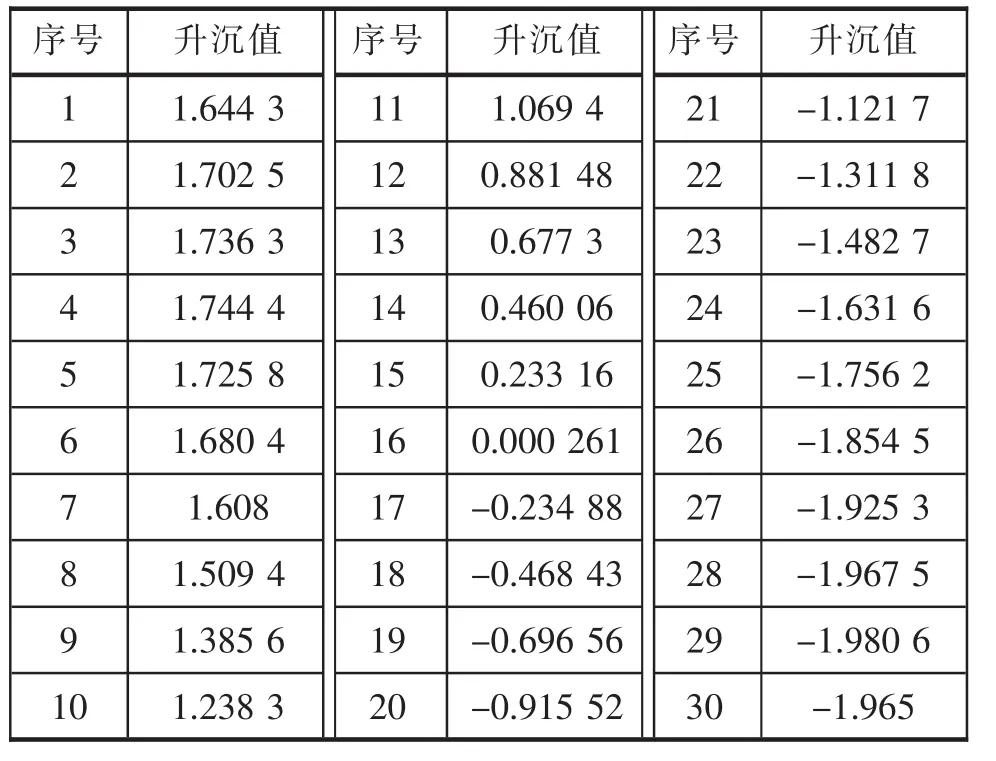
表1 舰船升沉历史数据表
根据AIC准则对系统模型进行辨识,算得p^=5,At=[4.8822 5.0431 5.0912 5.0269 4.853],由表1中数据作为重物升沉的历史数据,对重物的升沉进行预报,预报结果如图3和图4所示。
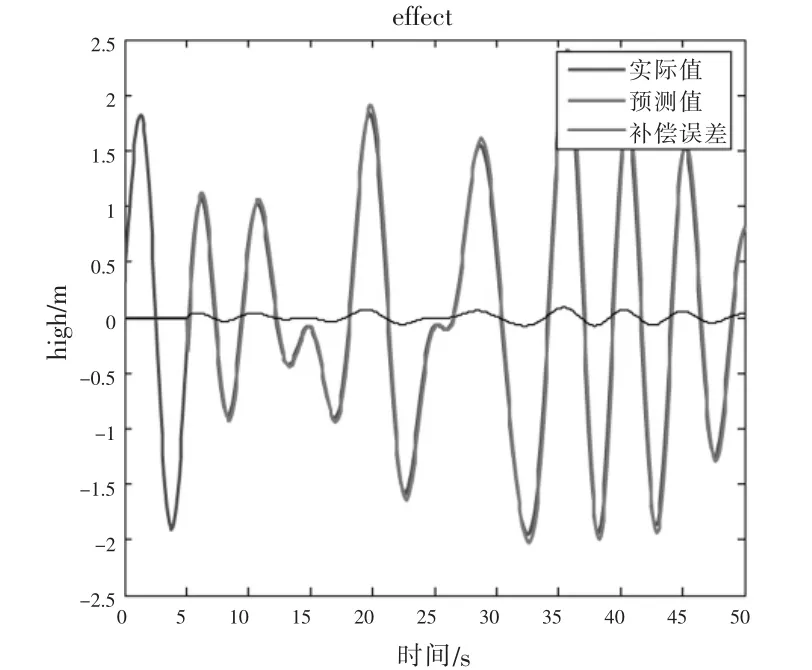
图3 AR模型预效果(m=1)

图4 AR模型预报效果(m=2)
由于AR模型是将运动模型简化为线性模型进行预报,故在进行多步预报时精度明显降低。以预报数据第26~30个为例分析预报结果,得出误差率如表2和表3所示。
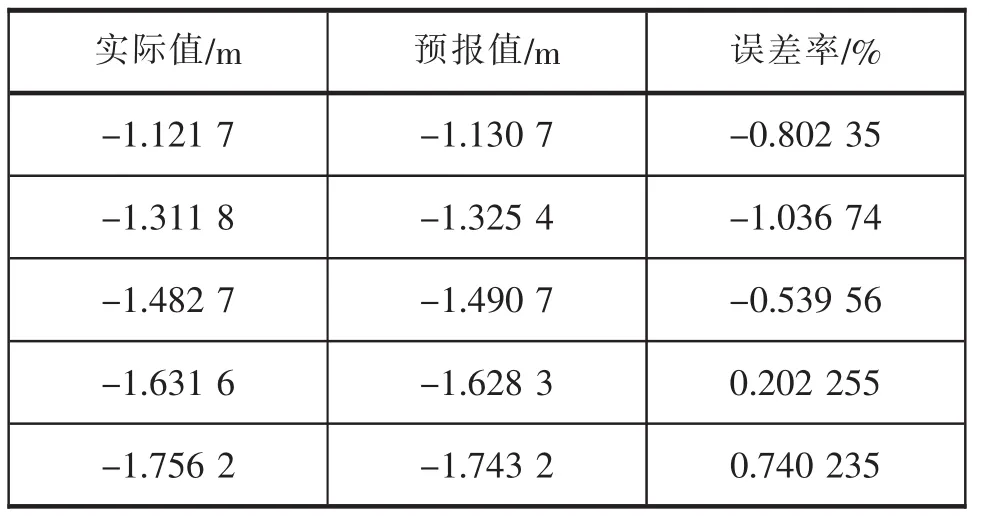
表2 预报误差(M=1)
由表2与表3的对比看出,当预报步数增加时,误差值也随之增大。
3 广义预测与PID复合控制策略
广义预测控制由于采用多步输出预测、滚动优化和反馈校正等控制策略,获取系统过去和未来的有关信息比单步预测的多,因而抗负载扰动、随机噪声与时延变化等能力显著增强[9]。但由于需要在线递推求解Diophantine方程,滚动优化中又需要对控制矩阵进行求逆,因此计算量大且实时性较低。PID控制算法简单,不基于任何模型,有较小的采样周期,对过程中的突变性扰动有很好的控制效果。将广义预测控制和经典的PID控制结合起来,不但能克服过程中的大滞后、非线性和时变的影响,还能有效克服控制过程中的突变性扰动。
3.1 复合控制系统仿真模型
由于液压缸自身存在一定非线性因素,并且在换向时存在死区,故需要采取相应的方法加以控制。本文采用PID对液压缸进行内环控制,以GPC对整个补偿装置进行前馈控制,用Simulink建立系统的仿真模型,如图5所示。

图5 主动式波浪补偿系统仿真程序图
3.2 仿真结果分析
对PID参数的整定,可分别取Kp=3、Ti=0.080 0、Td=0.020 0。预测模块分别在时延d=1、d=2、N=8和N=10时对系统进行仿真,仿真结果见图6~图9。

图6 预测控制误差(d=1,N=8)
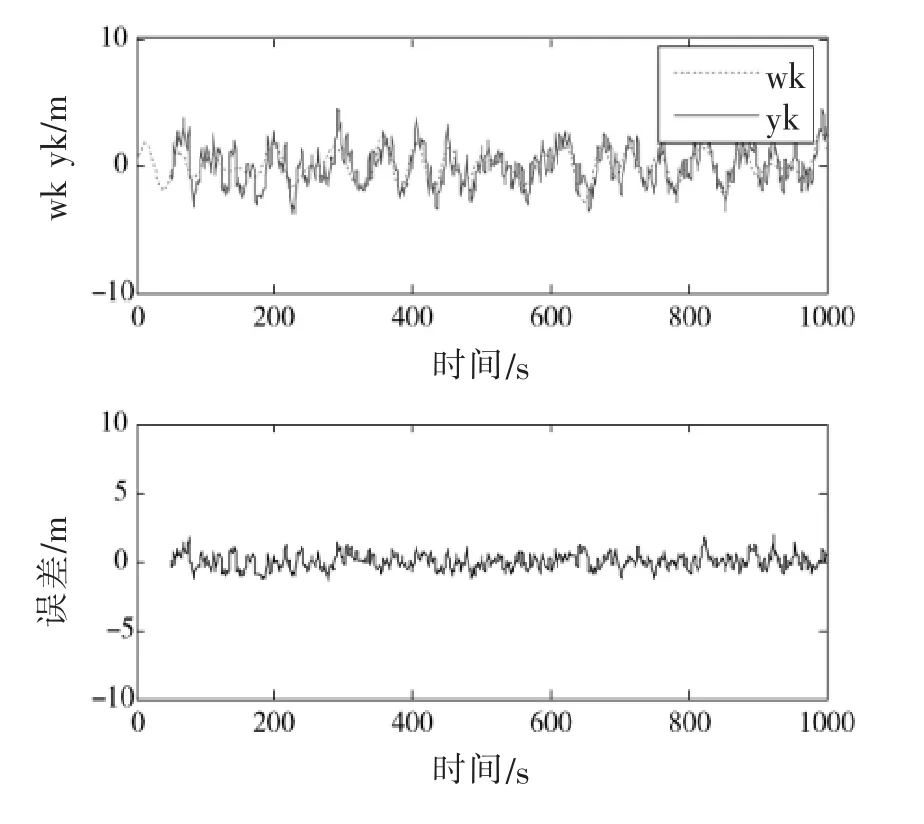
图7 预测控制误差(d=2,N=8)
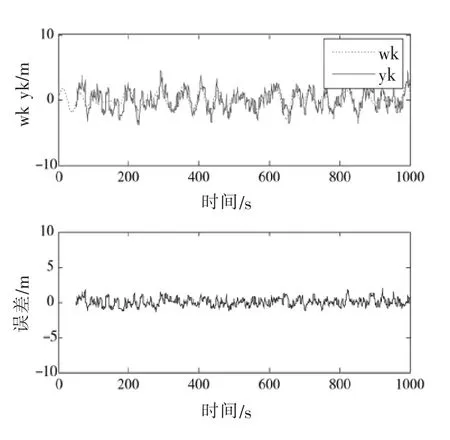
图8 预测控制误差(d=1,N=10)

图9 预测控制误差(d=2,N=10)
由图6和图7可知,当系统延迟d增大时,控制器的预报误差增大;通过图6、图8和图7、图9比较,当d一定时,适当增加预测长度,可以在一定程度减小预报误差。如果条件允许,可适当调整预报长度以减小这类误差。但是预报长度增大时会牺牲计算时间,导致在实际控制时实时性变差。
4 结 论
本文针对主动式波浪补偿的预测控制技术进行了较为深入的研究,尝试将AR模型与广义预测算法(GPC)应用于波浪补偿的预测控制中,得到主要结论如下:
(1)建立两种预测控制策略的模型,并分析两者的预测误差,验证了两种方案的可行性;
(2)将广义预测控制与经典的PID控制结合,克服预测过程中的大滞后、非线性和时变的影响,有效克服控制过程中的突变性扰动。
(3)AR模型的原理就是将运动模型简化为线性模型进行预报,故进行多步预报时精度会降低。
(4)广义预测控制系统延迟d增大时,控制器的预报误差增大。
[1]HASSAB J C.Contact localization and motion analysis in the ocean environment[J].IEEE Journal of Oceanic Engineering,1983(8):136-147.
[2]舒迪前.预测控制系统及其应用[M].北京:机械工业出版社,2001:9-27.
[3]曾毅.现代运动控制系统工程[M].北京:机械工业出版社,2006:15-83.
[4]王尹永,龚才豪.极点配置用于多步预测控制[J].控制与决策,1989,4(4):56-59.
[5]MARTINEZ M,SENENT J S,BLASCO X.Generalized predictive control using genetic algorithms[J].Engineering Artificial Intelligence,1998(11):355-367.
[6]张树侠,孙静.捷联式惯性导航系统[M].北京:国防工业出版社,1988.
[7]安鸿志,陈敏.非线性时间序列分析[M].上海:上海科学技术出版社,2002:41-55.
[8]彭秀艳,赵希人,高奇峰.船舶姿态运动实时预报算法研究[J].系统仿真学报,2007.
[9]王伟.广义预测控制理论及其应用[M].北京:科学出版社,1998.
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18 11:22:44
数学物理学报(2022年3期)2022-05-25 13:33:00
能源工程(2020年6期)2021-01-26 00:55:22
当代陕西(2020年24期)2020-02-01 07:06:46
山东冶金(2019年3期)2019-07-10 00:54:04
中国中医急症(2019年10期)2019-05-21 07:20:28
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58
消费导刊(2018年10期)2018-08-20 02:57:02
数学年刊A辑(中文版)(2016年2期)2016-10-30 01:46:38
通信电源技术(2016年1期)2016-04-16 04:57:26