
多波束在琼州海峡跨海工程水下地形测量中的应用
2012-08-06 10:27张建军李剑坤
铁道勘察 2012年2期
张建军 樊 云 李剑坤
(1.中铁大桥勘测设计院集团有限公司,湖北武汉 430050;2.长江三峡水文水资源勘测局,湖北宜昌 443000)
琼州海峡位于广东省雷州半岛和海南岛之间,西接北部湾,东连南海北部,呈东西向延伸,海峡东西长约80 km,南北平均宽度为29.5 km。琼州海峡跨海工程是连接海南与内地之间的运输通道,此项目跨海长度约23 km,中间无过渡小岛,水深,地质条件复杂。为了给通道设计以及海床演变分析、通航论证、海域使用论证、环境保护评价、潮流数学模型专题等研究提供水下地形基础资料,需进行跨海通道附近大范围、大比例尺水下地形测量。本文简单阐述无验潮模式下多波束水下地形测量的基本原理,并结合琼州海峡跨海工程应用说明该模式的实施步骤。
1 GPS RTK定位技术
常规工程水下地形测量采用交会法或极坐标法确定水面测点的平面位置,这种方法受限于观测条件,费力费时,作业效率低,测绘成果精度较低。随着GPS RTK定位技术的不断成熟和发展,利用这种技术手段,通过对测量点定位结果进行实时改正,可计算出载体测量船在航行过程中的精确三维坐标,实现水面测量点的数据采集,并通过导航软件以图形和数字的方式显示测量船的各种导航信息。
2 多波束无验潮水下地形测量原理
海底工程地形测量需测量海底平面位置和高程,而海底高程测量是通过水面高程和水深测量来实现的。GPSRTK技术能实时提供水面测点的三维大地坐标,水面测点通过高程异常实时改正,可求得测点高精度瞬时高程值。在多波束测深仪问世前,水深通过回声测深仪、铅锤或测深杆等手段获取,此类方法是单点水深测量;而多波束测深系统是对测区内一定范围进行无遗漏扫测,能同时、快速、精确测出沿航线一定宽度内上百个水下测点的水深数据,其测深原理如图1所示。
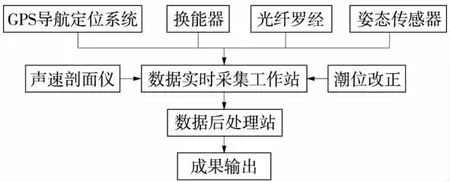
图1 多波束测深原理
3 实例
琼州海峡跨海通道多波束水下地形测量的作业系统主要由Trimble R8 GNSS双频接收机、SeaBat 8101多波束测深系统、计算机数据通信链及Hypack专业软件等组成。由于水域测量范围将近500 km2,项目实施前,必须进行周密细致的布置,制定切实可行的质量保证措施。
3.1 资料准备
利用测区已有成果资料,包括坐标系统、控制点、既有水下地形图、水文等资料,分析、计算测区范围内必要的技术参数,完成的主要工作如下。
高程异常模型的建立:在测区两岸各收集了两个高等级的平高控制点,分别位于测区附近。由于测区范围大,项目采用分段式作业模式,在测区两岸各均匀增设4个C级平面控制点,同时进行三等水准联测,使用TGO软件计算测区高程异常值参数;用10 cm的等高距,建立测区等高程异常分布图和高程异常模型文件。
测深线布设:测深线包括主测深线和检查线两部分。主测线布设主要考虑测线的间隔和测线方向,要求线间数据重复率大于20%。检查线基本按垂直主测线方向,其工作量按主测线总量10%的比例布设。
3.2 系统安装
船体独立坐标系的建立:为了确定波束的空间关系和波束脚印的空间关系,需建立船体独立坐标系,其原点位于换能器的中心位置,x轴指向船的航向,z轴垂直向下,y轴指向侧向,与 x、z轴构成右手正交坐标系。
设备安装:多波束测深系统中配置了高精度的运动传感器和光纤罗经,安装光纤罗经时箭头方向应与测船航行轴线相同并保持平行,其他设备按照其对外部环境要求,安置在安全、方便、稳定、可靠的位置上。
3.3 系统校准
多波束换能器、传感器、GPS天线等安装完成后,必须精确测定它们之间的相互关系,并输入到多波束采集软件中。
SeaBat 8101多波束系统能同时接受多波束、GPS、GYRO、MRU四种信息,各传感器的时间同步性、安装的位置、角度等对测量成果精度均产生影响,需要对这些偏差进行校准。通过采集一系列特定测线的数据,经处理后得到系统的延迟、纵偏、横偏等校正参数。
声速改正:采用SVPLS型号声速剖面仪,作业期在测区进行声速采集,获取从海水表面至海底的温度和声速数据,并对比仪测水深与锤测水深,对测量深度成果进行改正。
3.4 数据采集
多波束系统设备安装和调试完成,并在分段测区进行了必要的校准,便可进入系统的人机对话界面进行数据采集测量,主要完成以下的操作:
①为测区定义测量名称,选择坐标系统及投影方式;
②设置各数据接口的参数;
③输入各传感器的相对坐标和各项校准值;
④输入测线号;
⑤开始多波束发射并选择记录。
在数据采集时,需通过计算机窗口界面对扫测数据进行监视,主要的内容如下:
①以数字和图形两种方式显示条带覆盖宽度,监视相邻条带的宽度变化,达到全面覆盖的目的;
②调控波束信号增益和功率,保证波束质量良好;
③显示每个发射脉冲的水深横剖面,对比中央波束和边缘波束的水深变化,检测声速剖面改正的有效性;
④显示水深瀑布图,可以立刻知道水底是否有障碍物。
每天外业测量结束后,应再次现场核对多波束测深系统的关键参数设置,及时将外业原始数据转换成内业数据处理软件包能使用的数据格式。
3.5 数据处理
对实时采集的多波束数据进行编辑,剔除或改正定位数据中的突跳点、航向异常点后,使用CARIS软件对多波束水深数据进行分析、滤波、数据回放、声速改正、清除不合格数据等精处理,采取10 m×10 m网格抽稀,生成测区三维坐标数据,输出测区海底数字地形文件。
3.6 精度评估
为了评估多波束本身以及各传感器安装、校准、水位改正、声速改正等对测量结果的综合影响,本次外业扫测成果质量以检查线与主测线交叉点进行质量评估,实测检查线48条,主测线共470条,利用两线相同区域内共489 880点的三维数据,通过Hypack软件计算,检查线与主测线测量成果的算术平均偏差为0.19 m(标准偏差为±0.59 m),满足技术设计方案的要求。
4 结束语
以琼州海峡跨海通道工程水下地形测量项目为应用实例,分析了大面积海域无验潮模式下多波束水下地形测量具体实施的步骤和经验。海域中的工程水下地形测量项目具有测区范围广、工作环境复杂等特点,对测量仪器设备,工作实施管理,现场测量技术人员专业知识、经验及数据后处理等方面要求极高,在实际应用中需不断摸索、总结,充分发挥多波束测深系统的优越性。
[1]周忠谟,易杰军,周琪.GPS卫星测量原理与应用[M].北京:测绘出版社,2004
[2]赵建虎.现代海洋测绘[M].武汉:武汉大学出版社,2007
[3]李家彪.多波束勘测原理技术和方法[M].北京:海洋出版社,1999
[4]梁开龙.水下地形测量[M].北京:测绘出版社,1995
[5]陈俊勇.全球导航卫星系统进展及其对导航定位的改善[J].大地测量与地球动力学,2009(2)
[6]胡家赋,刘宇明.HYPACK导航系统在海洋资源勘探中的应用[J].海洋测绘,2003(6)
[7]彭琳,刘焱雄,吴永亭,等.海洋测绘中船体姿态改正的误差分析[J].海洋通报,2007(3)
[8]GB12327—1998 海道测量规范[S]
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
河北地质(2021年4期)2021-03-08
海岸工程(2020年1期)2020-04-25
中国铁道科学(2019年5期)2019-10-19
测绘通报(2018年10期)2018-11-02
海峡姐妹(2018年8期)2018-09-08
中国工程咨询(2017年4期)2017-01-31
中国工程咨询(2017年5期)2017-01-31
中学生数理化·八年级物理人教版(2016年7期)2016-12-24
航空学报(2015年4期)2015-05-07
