
神朔铁路智能视频入侵检测系统设计
2012-08-06 09:38张腾云
铁路计算机应用 2012年12期
张腾云,荆 涛,霍 炎
(北京交通大学电子信息工程学院,北京100044)
目前,铁路安全监控与管理都是以被动方式运作的,无法在事前主动侦测事件以防止威胁事件发生。智能视频入侵检测技术借助计算机强大的数据处理功能,对视频画面中的海量数据进行高速分析,过滤掉用户不关心的信息,仅仅为监控者提供有用的关键信息。智能视频入侵检测以数字化、网络化视频监控为基础,是一种更高端的视频入侵检测应用[1]。
智能视频入侵检测技术其研究工作涉及模式识别、图像与视频处理、计算机视觉、人工智能、认知科学等多个信息学科知识。智能视频入侵检测系统通过摄像头捕获场景的视频数据,通过对数据的自动分析获取场景信息并采取相应措施,其最终目标是用摄像头代替人眼,计算机代替人脑。其一般过程包含:动/静态场景建模、运动检测、物体分类识别、目标跟踪、理解和描述行为、人和车辆的识别、多摄像头信息融合、图像视频检索等。
1 智能视频入侵检测系统结构
在传统监控系统中,动/静态场景建模、运动检测之类的基础应用已经比较成熟[2],但智能视频入侵检测系统的核心是:物体分类识别、目标跟踪、理解和描述行为。只有真正做到了这些功能,才能实现最终用摄像头代替人眼,计算机代替人脑的目标[3]。
该系统实时分析监控区域内的视频图像,发现入侵目标后,分割入侵目标并存储,同时发出报警信号,最终实现对入侵目标的实时检测与异常报警。

图1 智能视频入侵检测系统框图
智能视频入侵检测系统框图如图1。该系统运行状态分为:正常监控状态和入侵报警监控状态。正常监控状态下只实时分析监控区域,入侵报警监控状态下不但实时分析监控区域,而且发出报警信息,并存储监控视频。图1中虚线框图部分完成对监控视频的实时分析和入侵目标的检测和分割处理。
图像(前端)采集:是安装在现场的设备,包括摄像机、视频光端机。主要任务是对现场进行实时视频数据采集,通过光纤传输,将现场图像传到视频处理分析部分。
视频(智能)分析处理:设备包括视频服务器(数字编码/智能分析)和现场数据处理工控机。对前端采集的视频进行分析,主要是入侵检测和目标分割与跟踪,设定特定的规则判断现场的紧急情况程度,根据情况上报或报警,同时可对现场视频录像。
信息上传:在指挥中心配置综合视频监控平台,可以实时显示前端报警信息、现场实时图像等信息,并根据入侵信息发出告警信息。
2 入侵检测
2.1 运动目标检测
视频入侵检测,是通过分析视频图像,检测是否有运动目标(人或落石)入侵监控区域,如图2中检测到工人入侵,并根据检测结果做出应对措施。检测入侵目标的准确性及能否分割出入侵目标,对后续的应对措施起到决定性的影响,且直接关系到视频的编码传输效率。因此,检测运动目标的精确度就显得尤为重要。
本文综合了常用的视频目标分割中基于连续帧差和背景帧差2种方法,通过当前帧、前一帧的参考背景和前一帧的图像内容3幅图像信息,首先计算前后2帧的差分值,根据亮度补偿,更新参考背景,利用背景帧差分检测运动的入侵目标,比较连续k帧的参考背景确定是背景变化还是目标入侵。这种方法避免了由于外界非入侵因素(如光照变化)等情况导致的对入侵目标的误检和漏检,保证系统检测的准确性和鲁棒性。
2.2 初始参考背景的生成与更新

图2 入侵检测图例
考虑到在区域监控时,基于背景帧差的目标分割方法,要得到一个纯背景帧图像而不包含任何入侵目标,某些情况下是很难实现的。综合了连续帧差与静态区域分割2种方法:(1)对运动区域的大致位置进行定位。(2)利用邻近平均插值对运动区域进行处理,获得初始参考背景。(3)对初始参考背景的色彩和亮度信息进行自适应调节得到当前帧的参考背景,实现参考背景的更新。
假设当前帧为I0,I0的前一帧为I-1。首先在亮度空间内,利用分水岭算法对前一帧图像I-1进行区域分割,然后在色度空间内分析这些区域,合并具有相同颜色距离的区域,这样便可得到I-1的静态分割区域。通常情况下,入侵目标具有相同或相近的灰度或颜色特征,因而分割后的入侵目标基本位于图像中同一分割区域内。设分割后的区域为Si(i=1, 2, …),将当前帧与前一帧求差分:

若公式(1)中差分的绝对值|difI|>0,则认为是图像的运动部分。将差分图像difI与分割图像相比较,若|difI|>0的像素点在某个区域Sj(j∈i)中的个数大于阈值T0,即该区域中超过T0的像素点是运动的,可以认为区域Sj是运动区域。
将图像I-1分成3像素×3像素大小的块,遍历每一个块,若某块中部分像素位于运动区域内,则用该块内的其余像素的均值替代这些像素;若某块所有像素点都位于运动区域内,则用该块上边和左边的块中所有像素的平均值替代该块中的9个像素值;若某块中所有像素均不在运动区域内,则该块像素值不变。这样得到初始参考背景帧。
当进行背景更新时,同样利用公式(1)定位运动区域。在亮度空间内,将2个相邻帧都分成3像素×3像素大小的块,比较背景区域中对应块的亮度平均值,用比值α对前一帧的参考背景进行更新,便可得到当前帧的参考背景。如果背景信息有变化,则比较连续k帧的参考背景,确定是背景变化还是目标入侵。通过比较连续k帧的参考背景,如果发现同一位置都检测到有新的物体存在或原有物体丢失,则认为是背景信息有变化(如背景物体发生了移入、移出),那么后续的帧中便使用背景信息变化后的背景。
2.3 入侵检测与目标分割
在得到当前帧的参考背景后,分别将当前帧与其参考背景在RGB 3个颜色通道进行差分,其差分结果difi(i=R, G, B)的变化主要由2方面因素引起:监控场景内的物体运动和随机噪声。对3个颜色通道的差分图像分别设置一个阈值,利用公式(2)式对差分图像进行二值化处理。

其中,Ti是多次实验统计值。将difi≥Ti(i=R,G, B)的像素点设为入侵目标点,difi≤Ti(i=R,G, B)的像素点认为是背景像素点,入侵点和背景点像素设置如公式(2)。
在确定入侵点和背景点后,接下来需要得到精确的入侵目标。由于存在随机噪声,公式(2)得到的二值化结果会存在噪声点或区域,因此要对其进行形态学处理,得到准确的入侵目标。利用形态学处理的腐蚀和膨胀操作,腐蚀去除噪声点和小区域,膨胀填充入侵目标,然后计算处理后的区域面积S。若S≥Th(设定的阈值),则认为监控区域异常,可能存在入侵,系统进入报警监控状态,触发相应的声光、电话报警等入侵报警装置,并录像存储监控视频;否则,则认为监控区域无异常,系统保持正常监控状态。
当检测到监控区域异常时,需要存储相应的视频信息并对入侵目标编码传输,因此需要分割出入侵目标。首先将得到的入侵区域和当前帧相比较,将当前帧中与入侵区域位置以外的所有像素设为0,这样便得到了完整的入侵目标。
智能视频入侵检测系统具有变被动为主动、24 h×7全天候可靠监控、有效利用视频资源,减少存储成本,节约人力资源、适应性强、提高响应速度、提高报警精确度等优势。
3 神朔铁路的实现及优势
通过智能入侵检测系统数据的接入,实现对神塑铁路神木北车站和蛇口峁隧道的智能视频监控和报警功能。异物入侵报警监控状态实现自动触发相应的报警装置并记录监控图像和报警功能。神朔铁路公司目前在重要道口、大桥、隧道等重点部位都安排有保安或者值班人员24 h值守,在这些重要地点应用了智能视频分析系统后,可以减少人员或完全实现无人值守,减少人员成本,提高劳动效率,减少人员在恶劣环境下的劳动强度,并且可以在地图中记录报警点以便后续查询和重点关注,如图3。
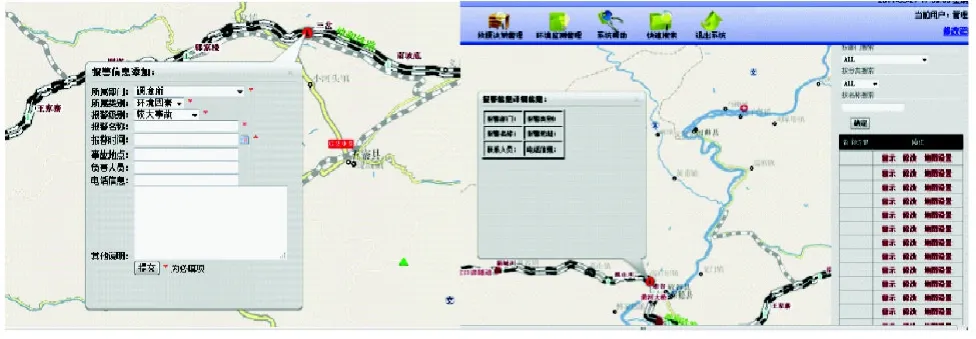
图3 地图报警点设置与查询
智能视频分析系统是从现实出发,根据重点监测部位的结构特点、运营环境、气象地质条件设立的智能监测系统,系统能够深入分析神朔铁路安全运行的需求,并且及时处理行车的安全隐患,预防和监控行车过程中发生的灾害事故,控制灾害事故的发展从而减少事故损失,为行车指挥、设备维修、应急救援等决策提供技术支持,最大限度地保证运输安全。
4 结束语
本文提出了一种智能视频入侵检测系统,并在神朔铁路上设计实现。该系统为工务部门的管理人员提供了现场安全生产的科学依据,管理人员可以根据监测数据合理地安排工作,既避免了盲目施工的浪费,又可以保证安全行车。
[1] 陈兴杰,许劲松. 基于视频的入侵检测研究[J] . 微计算机信息,2010,26(4-3):193-194.
[2] 李益民,黄晓芳. 一种多区域视频监控入侵检测报警方法的研究[J] . 电子设计工程,2010,18(12):146-148.
[3] Zujun Yu, Research on Intrusion Clearance Detection System for High-Speed Railway based on Binocular Stereo Vision[J] .2011 IEEE International Conference on Service Operations,Logistics, and Informatics (SOLI), 532 - 536.
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
汽车工程师(2021年12期)2022-01-17
当代陕西(2020年14期)2021-01-08
奥秘(创新大赛)(2020年7期)2020-07-27
红领巾·萌芽(2019年8期)2019-08-27
铁道通信信号(2018年5期)2018-06-28
中国与非洲(法文版)(2017年10期)2017-11-23
汽车维护与修理(2016年10期)2016-07-10
CHIP新电脑(2016年3期)2016-03-10
小学生·多元智能大王(2015年3期)2015-05-25
