模糊PID参数的相平面法整定策略
2012-07-13 07:19孙建延王振成
河南科技大学学报(自然科学版) 2012年3期
孙建延,王振成
(中州大学工程技术学院,河南郑州450044)
0 前言
PID控制即比例-积分-微分控制,它是建立在经典控制理论上的一种控制策略,在工业过程中得到广泛应用。常系数PID控制器为线性控制器,将误差的比例、积分、微分通过线性组合构成控制量,对被控对象进行控制,其对大多数单输入单输出线性过程具有令人满意的控制效果,而对于复杂过程却无能为力[1-2]。为了改进PID控制效果,出现了多种改进型PID[3]。变系数PID是其中一种重要的形式,模糊推理为变系数PID系数提供平滑切换的方法。模糊推理与PID结合的模糊PID控制器在实际中得到广泛应用[3-6]。
模糊PID的整定往往采用试凑法,整定过程慢,控制性能无法得到保证。文献[7]将模糊PID的整定分为非线性和线性两级整定,非线性级为模糊规则库的整定,线性级为量化因子的整定。模糊规则库决定了控制器的非线性性能,本文着重介绍了基于相平面法的规则库。根据控制对象的动态响应特征,在相平面划分为不同的区域,将不同区域映射到规则库,由此整定规则库内容[4,8-10]。该整定方法直观,通用,方便实施。
1 模糊PID控制器
图1是模糊PID控制器结构原理图,KP、KI、KD为比例、积分、微分系数,e,△e为误差及误差变化率。其利用模糊推理理论建立参数KP、KI、KD与e,△e之间的模糊逻辑关系,不同的e和△e要有不同的KP、KI、KD与之相对应,以使系统在不同的工作环境达到最优。
模糊PID的离散形式为
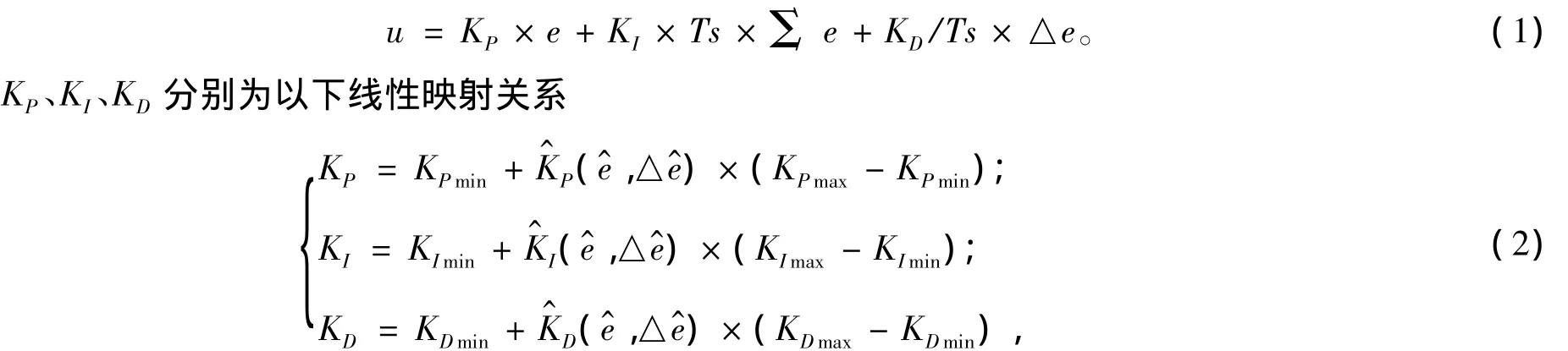
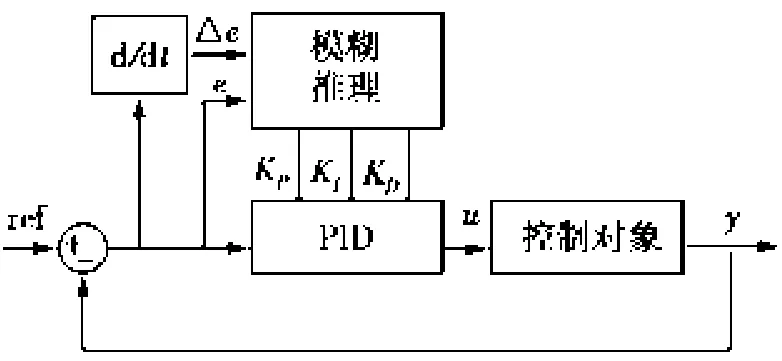
图1 模糊PID控制器参数整定原理图
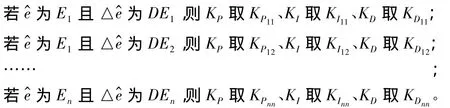
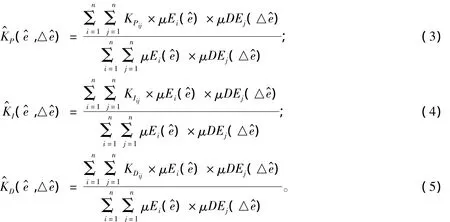
上述模糊推理过程如果采用带有乘积推理机、单值模糊器、中心平均解模糊器的模糊推理系统,则的解析表达式如式(3)~式(5)所示。其中的隶属度函数,KPij、KIij、KDij为单值模糊器所对应的 KP、KI、KD的模糊值,即模糊 PID 规则库。
2 非线性级(模糊规则表)的整定
控制对象的典型阶跃响应曲线如图2所示。阶跃响应在相平面上的轨迹如图3所示。根据(e,△e)在相平面上所处的象限,将阶跃响应曲线分为A、B、C、D、E 区语言变量取{NB NS ZE PS PB},分别表示负大、负小、零、正小、正大,隶属度函数取对称三角函数,中心均匀分布在[-1,1]语言变量取为{B S Z},分别表示大、小、零,采用单值模糊化,中心分别在[0 0.5 1],其隶属度函数如图4所示。语言变量将相平面分为5×5的区域,根据动态响应过程又可分为起动区、加速区、制动区和回调区,如图4所示。
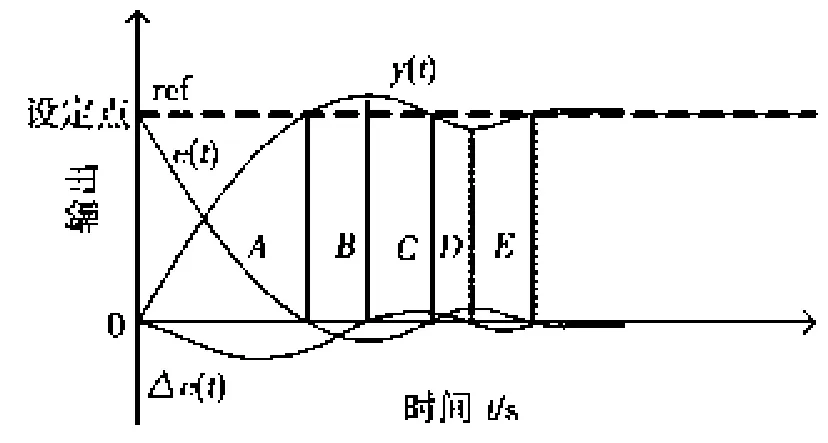
图2 控制对象阶跃响应
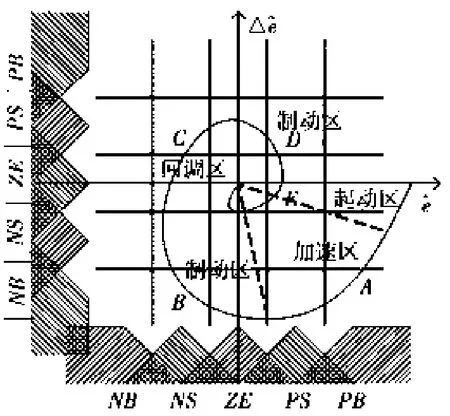
图3 5×5语言相平面及响应轨迹图
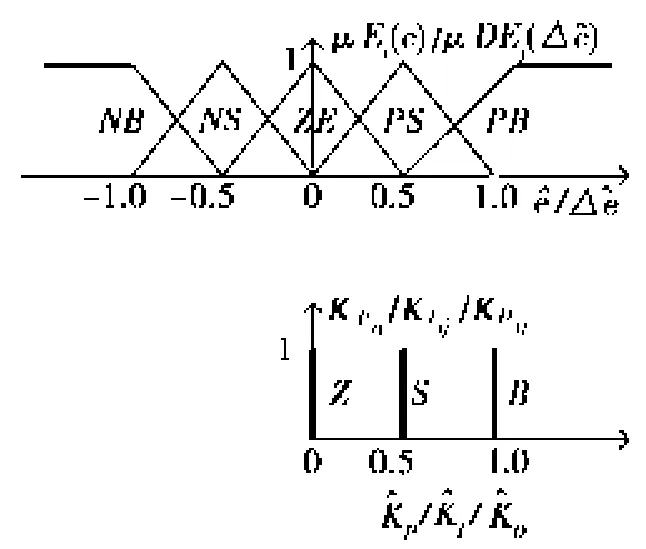
图4隶属度函数
KP、KI、KD的作用分别为:KP越大,系统的响应速度越快,但易产生超调,甚至会导致系统不稳定;KI越大,系统的静态误差消除越快,但KI过大,在响应过程的初期会产生积分饱和现象,从而引起响应过程的较大超调;KD是在响应过程中抑制偏差向任何方,但KD过大,会使响应过程提前制动,从而延长调节时间,而且会降低系统的抗干扰性能。
为使系统阶跃响应较高的动态性能、超调小,并能消除稳态误差,对应于图4相平面,在各个区域分别有:
(Ⅰ)在起动区,为加快系统响应速度,KP系数取B;为防止积分饱和,KI系数取Z;△e为负值,抑制了加速过程,KD系数取Z。
(Ⅱ)在制动区,为防止超调,KP系数取Z;KD系数取B。
(Ⅲ)在加速区,为使PID系数光滑过渡,KP系数取S;KD系数取S。
(Ⅳ)在回调区,为使输出回到参考值,KP取B,KI取B。
(Ⅴ)在稳定区,为降低对噪声的敏感性,KP取S,KD取S;为消除静差增大KI,KI取B。根据性能要求,稳定区应灵活取值,若是“紧控制”,KP取B,KD取B;若是“近似控制”,KP取Z,KD取Z,仅有积分起作用。
(Ⅵ)在右上与右下区域,为(e,△e)轨迹远离给定的方向运动,KP取B,KI取B,KD取B。
由此,制定KP、KI、KD模糊规则表,分别见表1、表2和表3。由表1所对应的曲面如图5所示。e,△e经量化后为e^,△e^,取值限制在[-1,1],p.u.为标幺值。由表2所对应的曲面如图6所示。将式(1)中积分项改写为Ts×Σ (KI×e),式(1)具有分离积分的作用。由表3所对应的曲面如图7所示。
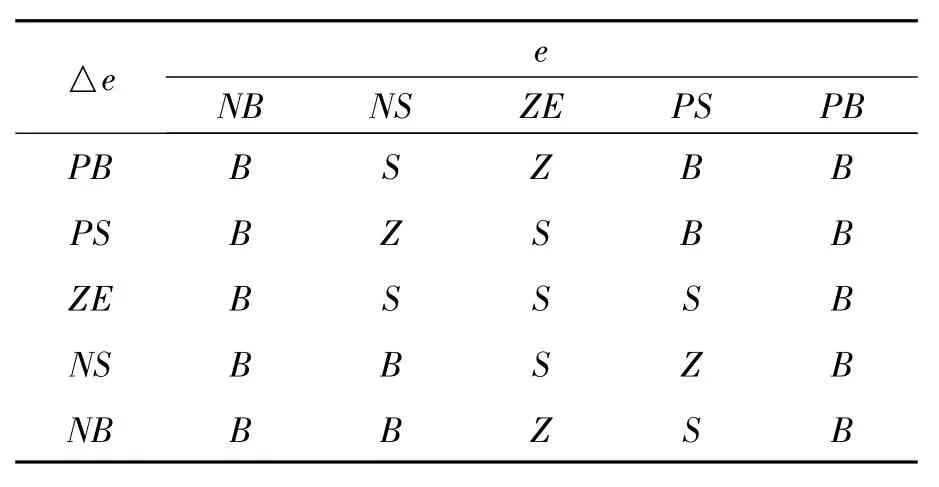
表1 模糊规则表KP
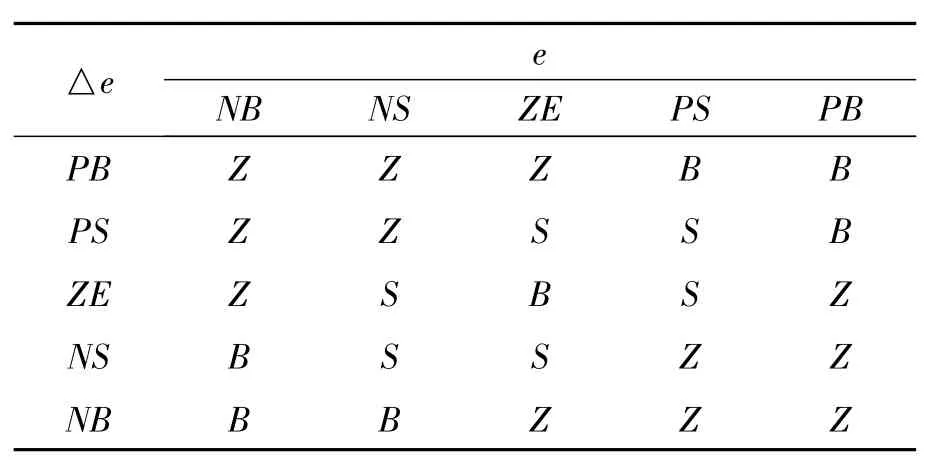
表2 模糊规则表KI
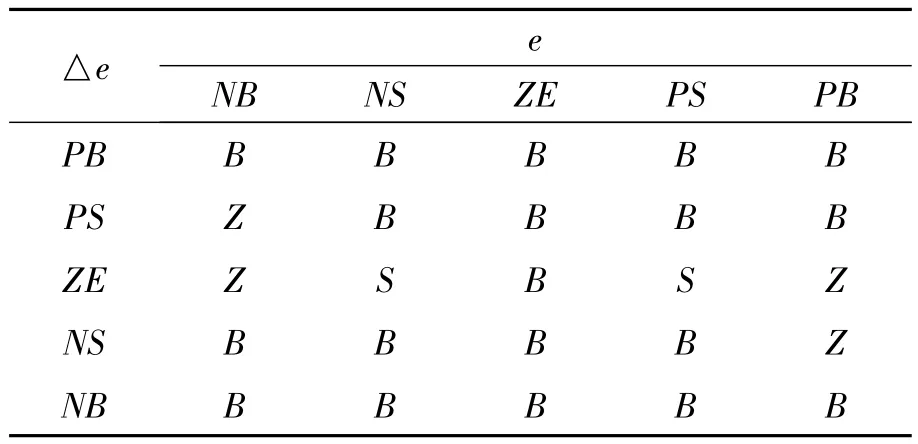
表3 的模糊规则表KD
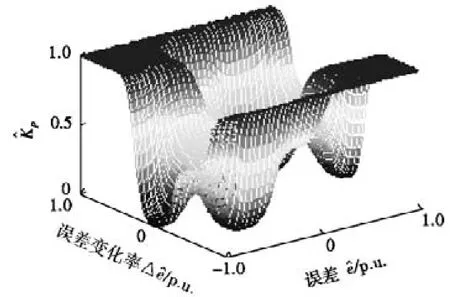
图5 曲面
3 线性级(量化因子)的整定
量化因子的作用是将e,△e量化到图3所设定的区域中,使KP、KI、KD按照预先设定的切换。
对控制对象 P(s),给定为30,emax=30。超调不超过1,应将量化前e[-1 1]设定在回调区[-0.25 0]内,取量化因子Gc=0.1,e^隶属函数中心对应量化前e为10×[-1 -0.5 0 0.5 1]。
P(s)稳态增益为0.02,控制器输入限幅[-25,25],采样周期0.2 s,由此得到△emax=25 ×0.02 ×0.2=0.1,设量化因子Gc=10,△隶属函数中心对应量化前△e为0.1×[-1-0.50 0.51]。如果控制对象未知,△emax也可通过试验的方法得到。
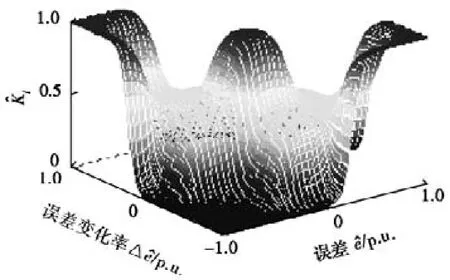
图6 曲面
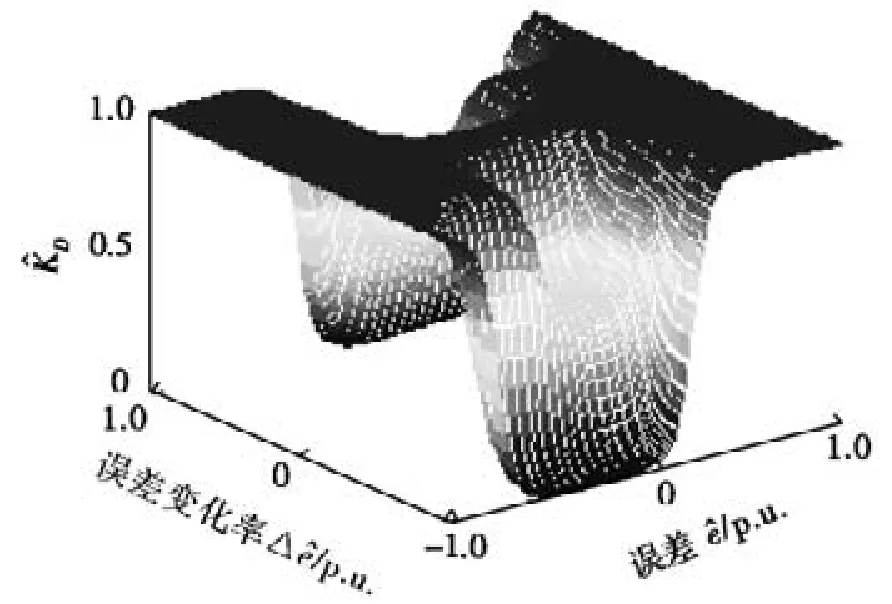
图7 曲面
4 仿真试验结果
通过仿真确定 KP、KI和 KD取值区间分别为 KPmin=0,KPmax=5;KImin=0,KImax=0.005;KDmin=0,KDmax=500。
P(s)阶跃响应如图8所示。模糊PID具有积分项,如果执行器存在死区等非线性环节时,可很快消除静差。P(s)有一个0极点,但积分项的存在并没有引起大幅超调。
由仿真结果(见图9)可知:模糊PID与常系数PID控制器(KP=3,KI=0,KD=500)控制效果相比,超调小,调节时间短。
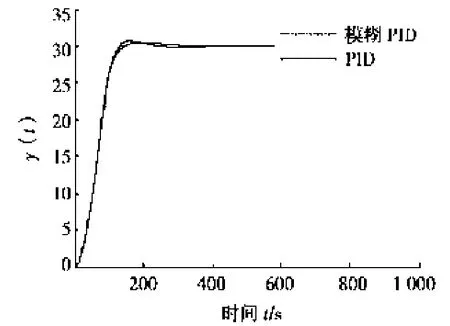
图8 阶跃响应y
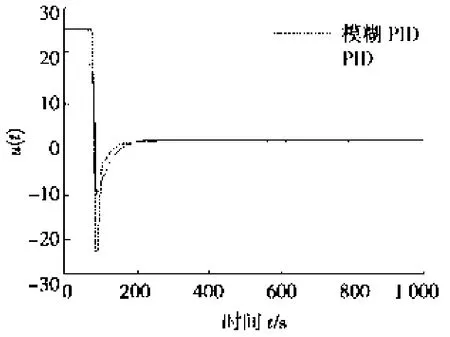
图9 控制器输出u
5 结论
本文分析了在相平面上设计模糊PID规则库的方法,给出了一般性的设计步骤,以相平面为工具克服了模糊PID规则库设计的随意性和盲目性[5-6,9,11-12]。规则库可以根据对象的相平面上表现的动态特征灵活修改,从而正确描述对象的非线性特征。该设计方法直观通用,对模糊PID控制器的整定有较强的指导意义和工程价值。
[1]吴宏鑫,沈少萍.PID控制的应用与理论依据[J].控制工程,2003,10(1):37-42.
[2]Mohan B M,Sinha A.Analytical Strcture and Stability Analysis of a Fuzzy PID Controller[J].Applied Soft Computing,2008,8(1):749-758.
[3]刘金锟.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2004.
[4]张立权.模糊推理系统技术[M].北京:机械工业出版社,2009.
[5]李强华,张根宝.模糊PID控制在水位控制中的应用与仿真[J].河南科技大学学报:自然科学版,2006,27(4):49-51.
[6]李水良,杜迎慧,闫守成.电磁离合器电流的模糊自调整PID控制[J].河南科技大学学报:自然科学版,2010,31(2):43-46.
[7]George K I M,Hu B G,Raymond G G.Two-Level Tuning of Fuzzy PID Controllers[J].IEEE Transactions on Systems Man and Cybernetics Part B-Cybernetics,2001,31(2):263 -269.
[8]胡寿松.自动控制原理[M].4版.北京:科学出版社,2007.
[9]张吉礼,欧进萍,于达仁.基于相平面轨迹特征的规则自调整模糊控制方法[J].控制理论与应用,2003,20(4):607-611.
[10]盖晓华,刘叔军.一种新的相平面分区控制器的分析与仿真[J].计算机仿真,2009,26(7):208-211.
[11]王述彦,师宇,冯忠绪.基于模糊PID控制器的控制方法研究[J].机械科学与技术,2011,30(1):166-172.
[12]王正林.MATLAB/Simulink与控制系统仿真[M].2版.北京:电子工业出版社,2008.
猜你喜欢
中学生数理化·高三版(2019年1期)2019-07-03
数学年刊A辑(中文版)(2019年1期)2019-01-31
数学物理学报(2018年5期)2018-11-16
天津教育·下(2018年9期)2018-07-13
试题与研究·高考数学(2016年1期)2016-10-13
浙江大学学报(工学版)(2016年10期)2016-06-05
肇庆学院学报(2016年5期)2016-03-11
华东师范大学学报(自然科学版)(2014年1期)2014-04-16
电力自动化设备(2013年11期)2013-09-18
电气电子教学学报(2012年1期)2012-10-12