
基于ZigBee技术的塔机群防碰撞控制系统
2012-07-11 07:43周文海刘海龙
制造业自动化 2012年24期
杨 辉,周文海,刘海龙
(1. 华东交通大学 电气与电子工程学院,南昌 330013;2. 江西省先进控制与优化重点实验室,南昌 330013)
0 引言
随着建筑业的快速发展,建筑施工机械——塔式起重机(简称塔机)的应用越来越广泛。同时,为提高作业效率,在同一建筑施工现场经常需要同时布置多台塔机近距离交叉作业[1],这样塔机与塔机之间、塔机与周围固定障碍物之间就有可能发生碰撞,这给塔机的安全、高效运行带来种种隐患,因此对塔机群防碰撞控制系统的研究具有重要意义。
针对塔机群防碰撞系统设计,文献[2]提出了通过比较两台塔机吊重到各自中心距离之和与两台塔机回转中心之间距离的关系来判断塔机是否有碰撞危险。实际上当高位塔机吊重到其中心的距离与低位塔机吊臂之和大于两台塔机回转中心之间的距离时塔机就有碰撞危险。文献[3]提出的基于超声传感器和Kalman滤波的塔机群防碰撞算法,然而超声波测距适用于在塔机相距比较近时,塔机相距远了误差就会比较大。且在塔机吊臂上布置传感器时,会出现重叠区或盲区,降低了数据的有效性及实时性,进入盲区后塔机有可能发生碰撞。
ZigBee作为一种短距离的双向无线通信技术,具有低功耗、低复杂度及低成本等特点。基于此,本文采用无线通讯ZigBee技术实现塔机群状态信息的交互,建立塔机群控模型和防碰撞运行控制算法,实现了主动防碰撞。采用自主进入与自主退出技术,满足了大型建筑工程塔机群协同交叉作业的需要,提高了塔机的工作效率和安全性。
1 系统方案设计和硬件平台搭建
本系统采用分布式控制模式,每台塔机控制器都是一个独立的监控子系统,各个监控子系统无主从之分。每个监控子系统分别获取自身塔机的几何参数包括塔机机型、塔身高度、坐标位置,再根据本塔机周围障碍物的几何参数和本塔机的运行状态信息,就可设计本塔机与固定障碍物的防碰撞算法。通过无线通讯网络可获取相关塔机的几何参数和实时运行信息,并建立塔机群控模型,就可设计塔机与塔机之间的防碰撞运行控制算法,得到塔机的控制决策。塔机群防碰撞控制系统的分布式结构如图1所示。
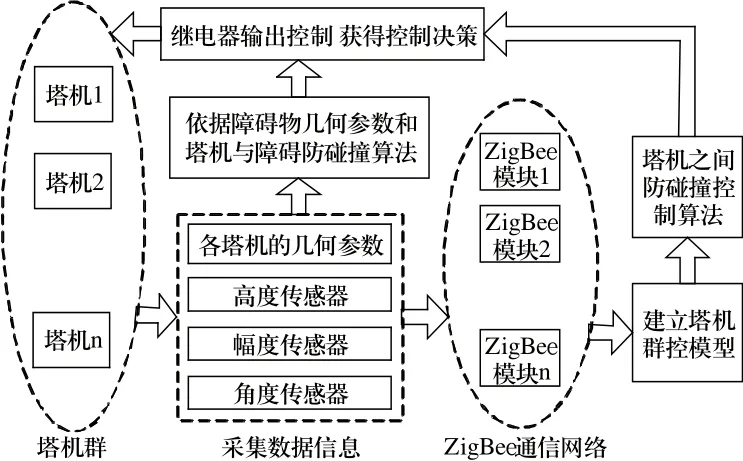
图1 塔机群防碰撞系统的分布式结构图
在这种分布式结构中,整个系统的防碰撞任务被分散到各个塔机监控子系统中,各个监控子系统选择有利于自己局部利益的控制决策,决策的制定和任务的执行表现出并行的特点,这种并行处理机制大大提高了问题求解效率[4]。由于在分布式结构中每个监控子系统都需要进行数据交互、逻辑分析与控制,这样不仅计算量巨大,而且影响了系统的实时性。因此,在程序初始化时将那些彼此不会发生干涉的塔机、障碍物排除在计算循环之外,这样可以大大提高系统运行效率。
监控子系统硬件平台以ARM9微处理器为核心,由信号采集处理模块、无线通讯ZigBee模块、报警系统、数据存储模块、输出控制模块和人机交互模块[5]组成,如图2所示。
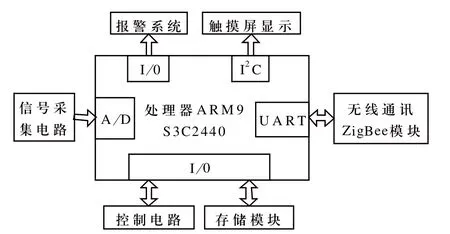
图2 防碰撞监控子系统硬件框图
本系统主要是采集塔机吊重高度、回转、幅度等参数,然后进行A/D转换、数据处理、信息交互、防碰撞运算、输出预警等操作,实现对各塔机的在线监测。
2 无线通讯ZigBee技术组网通讯
2.1 ZigBee协议栈
ZigBee协议栈包括IEEE802.15.4和ZigBee联盟定义,如图3所示。
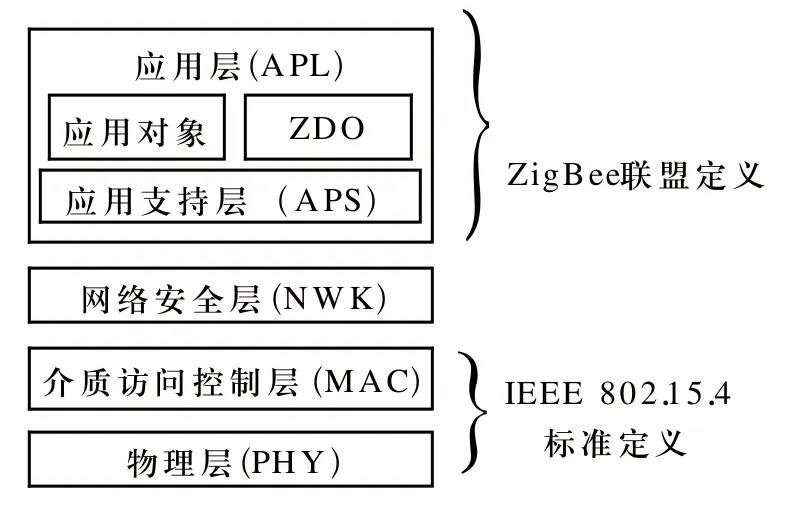
图3 ZigBee协议栈
IEEE802.15.4是IEEE确定的低速率无线个人局域网标准。这个标准定义了物理层(Physical layer)和介质访问控制层(Medium Access Control layer)[6]。物理层定义了物理无线信道和MAC子层之间的接口,提供物理层数据服务和物理层管理服务。介质访问控制层负责处理所有的物理无线信道访问,并产生网络信号和同步信号;支持PAN连接和分离,提供两个对等MAC实体之间可靠地链路。
ZigBee联盟定义了网络安全层和应用层。网络安全层主要用于WPAN的组网连接、数据管理以及网络安全等;应用层主要为实际应用提供一些应用框架模型等,以便对其进行开发应用。
2.2 无线通讯ZigBee模块组网方式
塔机群防碰撞无线通讯网络组网采用的是动态路由结合网状拓扑结构。动态路由就是指网络中数据传输的路径并不是预先设定的,而是传输数据前通过对网络当时可利用的所有路径进行搜索,系统会自动选择一个最方便最快速的方案来完成网络数据信息的传输。ZigBee网络节点组网方式采用点对点网络拓扑结构,如图4所示,每个ZigBee网络至少需要一个FFD实现网络协调功能,终端设备可以是RFD用来降低系统成本。
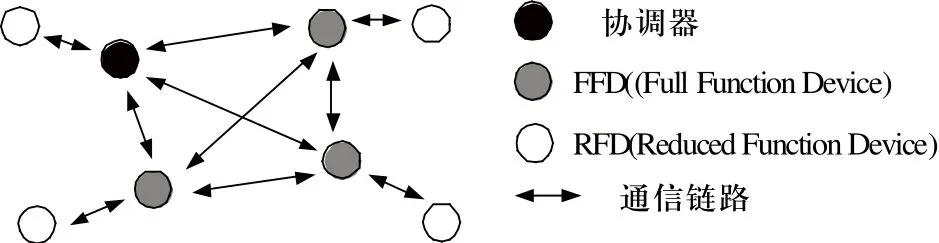
图4 点对点网状拓扑结构图
每个塔机监控子系统都是一个独立的网络节点,各个监控子系统根据约定好的协议向无线网络中发送含自身塔机编号、吊重高度、幅度、回转、吊臂长、坐标、塔身高度等防碰撞所需信息。同时各个塔机监控子系统会接收无线网络中的信息,并判断是不是传送给自己的信息,若是的话就可以进行信息的接收。由于塔机现场作业时摆放顺序具有随机性,且数量有增减,所以在配置ZigBee模块时采用路由设备类型和广播发送模式,当系统中任意一个塔机节点失效、移动位置或增减塔机数量,无线通讯网络能自动愈合重新组网[7]。
2.3 无线通讯ZigBee收发数据
无线通讯ZigBee模块实际就相当于一个无线串口,为了提高运行效率,系统采用多线程同步方式,有效避免多线程阻塞及冲突问题。在实验里用串口调试助手模拟两个模块的通讯状态如图5所示。由于串口收发是以十六进制的形式进行,而实际过程中塔机的运行参数有些会精确到小数点后面,所以我们一律将要传送的塔机运行参数乘以100,再转换成十六进制发送。我们以接收到的一组数据进行分析:FF FF 02 01 13 88 26 48 27 10 27 10 05 9B 09 2A 5C 0F 00。其中FF FF是起始码,后面的分别表示自身塔机ID是02号,发送方塔机ID是01号,塔机1的塔身高度为50,臂长98,坐标为(100,100),吊重高度14.35,实时幅度23.46,回转角度235.67。
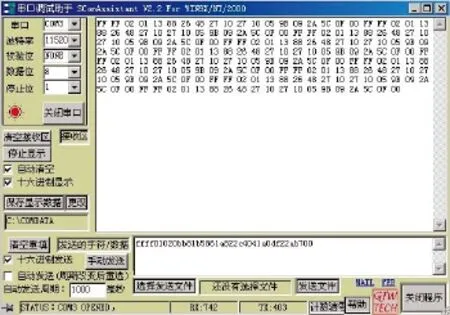
图5 实验室里模拟两个模块的通讯状态
3 塔机群建模和防碰撞算法设计
根据现场实际情况,选取最佳位置的一台塔机作为参考原点,建立直角坐标系,确保所有塔机均在第一象限内,各塔机中心相对于参考原点的X,Y轴距离即为该塔机的坐标。选取塔臂为高度的参考零点,这样在塔身往上加标准节时程序中就不用修改高度的参考零点了。一般以正北方向为角度的基准零度,小车在最小幅度时为幅度零点。这样建立的坐标系就可将系统中需要计算的距离所涉及到的点、线、面转化到了二维坐标系中。
在塔机运行过程中,实际工况可能比较复杂,特别是当同一施工工地有多台塔机同时交叉作业时,避免塔机可能发生的碰撞就显得尤为重要。塔机可能发生的碰撞主要分两种:第一种类型是防止塔机与塔机之间的相互碰撞,第二种类型是防止塔机与周围固定障碍物的碰撞。
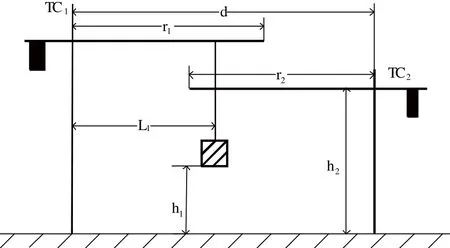
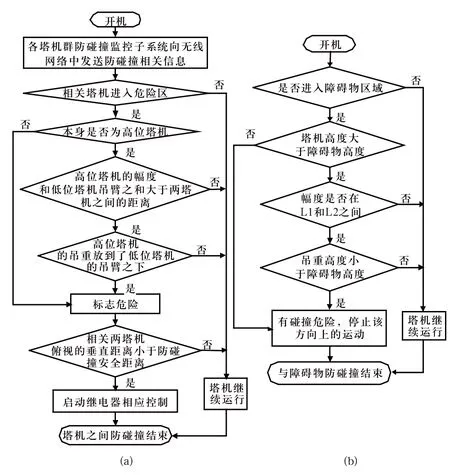
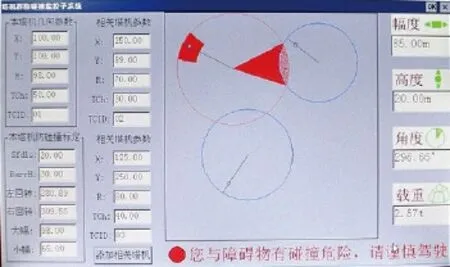
第一种类型是防止塔机与塔机之间的碰撞,如图6中塔机1和塔机2在交叉区域可能发生的碰撞。主要包括两个方面:塔机高度相同时起重臂之间的碰撞、塔机高度不同时高位塔机的起升绳或吊钩与低位塔机起重臂之间的碰撞。塔机与塔机之间防碰撞算法设计分四部分:1)是对交叉区域的圈定。如图6所示两塔机的吊臂臂长分别为r1和r2。根据两台塔机的坐标,可以求出塔机中心的距离d和q1,根据余弦定理可求出q2,这样就可以得到两个夹逼角度q1-q2和q1+q2,当塔机1的角度大于q1-q2小于q1+q2时就说明塔机1进入了交叉区域。2)是两塔机高度幅度方向上的防碰撞。如图7所示TC1是高位塔机,TC2是低位塔机,若满足L1+r2>d且h1 图6 塔机群中任意两台塔机运行俯视示意图 图7 高低位塔机在高度幅度方向上的防碰撞 根据式(1)可求出三角形BCD的面积S,由式(2)可求出TC1吊臂顶点B到TC2吊臂CD的垂直距离。用同样的方法可求出TC2吊臂顶点到TC1吊臂的垂直距离,取小者为两塔机相距的最小垂直距离。4)就是比较一下这个最小垂直距离和设定的塔机群防碰撞安全距离的关系。当两塔机都进入交叉区域且高度幅度方向上标记危险了,这时当两塔机相距的最小垂直距离小于塔机防碰撞安全距离时就认为有发生碰撞的可能,并输出相应控制决策。反之,则认为塔机运行安全,具体流程如图8(a)。 图8 塔机防碰撞流程图 第二种类型是防止塔机与周围固定障碍物的碰撞,如图6中塔机1和固定障碍物之间可能发生的碰撞。塔机与周围固定障碍物的防碰撞算法设计首先要对固定障碍物进行一定程度的简化,在其周围加上一定的裕量后等效为方型结构。根据(x3, y3), (x4, y4)可求出固定障碍物的区域˜,在现场还可以量出固定障碍物所占变幅L1和L2。当障碍物高度高于塔机高度时,进入固定障碍物的区域˜就有碰撞危险了。当障碍物高度低于塔机高度时,塔机同时满足进入固定障碍物的区域˜、幅度在L1和L2之间、吊重高度小于障碍物高度时才有碰撞危险。其它情况都能安全运行,具体流程如图8(b)所示。 我们在某工地安装了三台塔机群防碰撞监控子系统,工地现场如图9所示,三台塔机近距离矗立, 彼此都有交叉区域,周围还有固定障碍物。监控子系统界面如图10所示,三角扇形为交叉区域弧形扇形为障碍物区域,当塔机有碰撞危险时,都能及时报警处理。经过现场测试,跟其它的防碰撞系统相比本系统的优势就是最大限度的加大了群塔近距离交叉作业的区域。本系统计算了相关两塔机吊臂对地运动后在同一平面上的垂直距离,当该距离大于防碰撞安全距离且无碰撞可能时塔机都能安全运行,使塔机运行更加灵活,提高了塔机的工作效率和安全性。 图9 某工地三台塔机交叉作业实际工况图 图10 塔机群防碰撞监控子系统界面 本文针对在同一建筑施工现场的多台塔机近距离交叉作业时可能发生的碰撞,设计开发了一种基于ZigBee技术的塔机群防碰撞控制系统。通过塔机群运行状态信息的交互,建立了塔机群控模型和防碰撞运行控制算法。现场测试表明该系统能有效的防止塔机与塔机之间和塔机与周围障碍物之间的碰撞,在确保塔机安全运行的同时,有效的提高了塔机群的工作效率,具有良好的市场前景。 [1] 杨清泉, 刘春林. 塔机防碰撞及工作区域限制技术[J]. 建筑机械, 2004, (07): 78-80. [2] 刘晓胜, 周进. 塔机运行的关键控制算法研究[J]. 科学技术与工程, 2010, 10 (24): 5889-5895. [3] 张亚磊, 段志善. 基于超声传感器和Kalman滤波的塔式起重机防碰撞研究[J]. 起重运输机械, 2010, (10): 31-34. [4] 陈帮, 张洪涛. 基于嵌入式Linux的塔机群防碰撞控制系统[J].机电工程, 2011, (3): 346-348. [5] 杨辉, 刘海龙, 高子洁. 基于ARM9及WinCE6.0的塔机安全监控系统[J]. 计算机测量与控制, 2012, (1): 78-80. [6] 杨福宝. 基于ZigBee无线传感器网络节点的研究[J]. 制造业自动化, 2011, 33 (10): 85-88. [7] 郑夕健, 宋争艳, 谢正义, 费烨. 基于ZigBee的塔机群控无线通信系统实验研究[J]. 机械工程与自动化, 2010,(5): 1-3.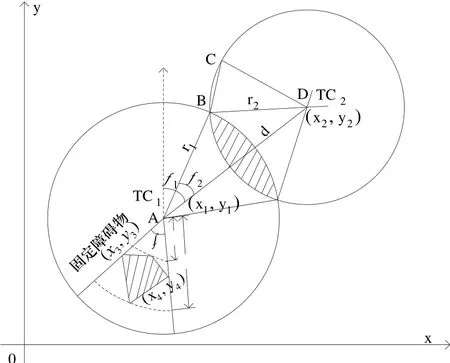
4 现场测试结果

5 结束语
猜你喜欢
机械设计与制造(2022年7期)2022-07-27
建筑机械化(2022年3期)2022-04-20
科学与财富(2021年33期)2021-05-10
中国军转民(2020年8期)2020-11-28
石油和化工设备(2020年5期)2020-06-09
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03
大陆桥视野·下(2017年8期)2017-09-19
科技资讯(2017年18期)2017-07-19
科学家(2017年5期)2017-06-09
