
MK7-3型阻拦装置定长冲跑控制阀结构特点及控制规律
2012-07-11 09:41:44杨茂胜毕玉泉王海东杨炳恒
舰船科学技术 2012年3期
杨茂胜,毕玉泉,黄 葵,王海东,杨炳恒
(海军航空工程学院青岛分院,山东 青岛 266041)
MK7-3型阻拦装置定长冲跑控制阀结构特点及控制规律
杨茂胜,毕玉泉,黄 葵,王海东,杨炳恒
(海军航空工程学院青岛分院,山东 青岛 266041)
定长冲跑控制阀是大型航空母舰拦阻索装置的核心部件。本文以美国MK7-3型阻拦索装置为例,分析了其结构组成特点,研究了阻拦力的基本控制原理,并讨论了飞机重量设置不准确时对阻拦力过载的影响。结果表明,重量设置偏小和偏大都可能产生大过载造成飞机损伤或者人员伤亡,甚至导致阻拦作业失败。
航空母舰;阻拦索装置;定长冲跑控制阀;结构特点
0 引言
现代喷气式舰载机的着舰速度通常为200~300 km/h,如果不加以阻拦,飞机着舰后至少要滑行上千米才能停下来,而一般航空母舰的飞行甲板长度只有200~300 m,所以在降落区域安装了阻拦索装置。美国现役航母上配置的MK7-3型拦阻装置是目前世界上各国海军航母中拦阻能量等级最大的着舰拦阻装备,能量等级达到6 500 t·m。其基本工作原理是:当舰载机着舰时,飞机尾钩钩住阻拦索,飞机前冲力通过阻拦索传递到滑轮组索上,滑轮组索再将该作用力传递到阻拦机动滑轮组、定滑轮组,随着滑轮组索被飞机尾钩不断拉出,阻拦索牵动阻拦机动滑轮组向定滑轮组方向移动从而带动主液压缸柱塞运动,主液压缸中的工作液经定长冲跑控制阀阀口,在阀口上下产生压力差,从而为飞机提供阻拦力。在阻拦过程中,定长冲跑控制阀阀口在凸轮转动的带动下逐渐变小,当阀口完全关闭时,飞机停住[1-4]。可见,定长冲跑控制阀是整个阻拦装置的大脑和心脏,是阻拦任务成功与否的关键[5-6]。本文介绍了 MK7-3型拦阻装置定长冲跑控制阀的结构组成,分析了阻拦力的控制原理,研究了飞机重量设置不准对阻拦作业的影响。
1 结构组成
如图1所示,MK7-3型拦阻装置定长冲跑控制阀主要由阀体、阀体支柱和飞机重量选择器3部分组成。

图1 定长冲跑控制阀结构示意图Fig.1 Schematic of constant runout valve structure
1.1 阀体
阀体由阀套、阀芯、阀座和一些安装组件组成。工作时,一方面从主液压缸的来油通过阀座流向阀口,在阀口处经节流降压后,由阀体流向蓄能器。另一方面调整螺钉在外部作用力的带动下推动阀套,从而带动阀芯向下运动,逐渐关闭阀口。阀体组件的实质就是1个由外力所控制的节流阀,主要作用是在阀口上下两端产生压力差,为飞机提供阻拦力。
1.2 阀体支柱
阀体支柱由凸轮和上、下摇块及柱塞组成的摇臂机构2部分组成。其中凸轮安装在水平方向的凸轮轴上,工作时,在链轮的带动下,凸轮绕着凸轮轴做旋转运动,通过凸轮旋转时凸轮线型的变化就可以控制阀口的关闭规律。
摇臂机构从上至下共有4个轴承,其中1号轴承与上端凸轮组件的凸轮相连,4号轴承与下端阀体组件的调整螺钉相连,在1号和4号2个轴承之间安装有上、下2个摇块。工作时,轴承1在凸轮旋转力的作用下和轴承2一起向下运动,轴承2的运动带动上摇块绕着支点A做顺时针转动,从而推动轴承3向下运动,轴承3的运动又带动下摇块绕着支点B做逆时针旋转,从而推动轴承4向下运动,最终带动与之相连的调整螺钉向下运动,逐渐关闭阀口。
在阀体支柱中核心就是这2个摇块,从这2个摇块的简化示意图(图2)中可以看出,假如此时轴承3和4都处在上、下摇块的中间位置,那么要想轴承4向下移动1个单位长度,就需要轴承3向下运动2个单位长度,而轴承2就需要向下移动4个单位长度,即轴承2与轴承4向下移动距离的比值是4:1,这个比值叫做臂长比。进一步来看,轴承2移动的距离也就是凸轮最下端点移动的距离,而轴承4移动的距离也就等于阀芯向下移动的距离,由于凸轮的转动和阀芯的向下移动是同步进行的,所以,距离的变化也就代表了速度的变化。因此,臂长比在这里反应的实质就是凸轮线型变化时最下端点移动速度与阀芯移动速度之间的比值。假如没有这2个摇块,阀芯向下移动速度就等于凸轮最下端点移动速度,而有了这2个摇块,阀芯的向下移动的速度既可以等于又可以不等于凸轮下端的移动速度,也就是说通过摇块臂长比的改变,就可以改变阀芯向下移动速度,这就是安装这2个摇块的主要作用。
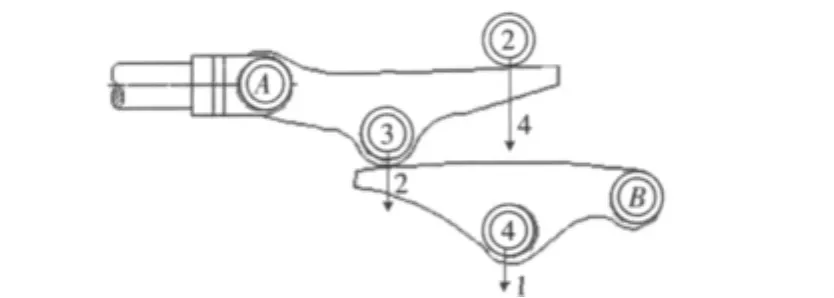
图2 摇块机构示意图Fig.2 Schematic of roll block manipulator
1.3 飞机重量选择器
飞机重量选择器安装在阀体支柱上摇块左端,主要由指示器、手轮和导向螺杆组成。当需要调整飞机重量设置时,通过电机带动或手轮旋转就可带动导向螺杆伸缩,改变上摇块支点A的位置,支点位置A的改变,使得轴承2和轴承3分别在上、下摇块上的位置也发生变化,也就改变了整个摇块机构的臂长比。另外,支点位置A的改变,通过摇块结构的传动,带动轴承4向下运动,最终反应在阀芯向下移动的距离上,也就是阀的初始开口大小。预开口大小的调节,使得阻拦力大小适应了飞机重量的变化,而臂长比的改变,保证了重量设置不同时阀口的关闭时机相同。
当导向螺杆处于最大伸出状态时,也就是立柱组件中的4个轴承处在同一直线上时,初始状态下阀芯向下移动的距离最小,也就是阀的预开口最大,所以此时所设置的飞机重量应该最轻,此时摇块机构的臂长比为1:1,随着导向螺杆逐渐向左缩回,阀芯向下移动的距离越来越大,臂长比也逐渐增加,当导向螺杆向左运动到底处于最大缩回状态时,阀芯向下移动的距离最大,也就是阀的预开口最小,所以此时所设置的飞机重量应该最重,同时臂长比增加到最大,为4:1。但是不管所设置的飞机重量轻还是重,在飞机达到规定滑跑距离时凸轮转动的角度都是一样的,由于凸轮线型一定,因此轴承1向下移动的距离也一样,只是重量轻时,预开口大,也就是要使得阀口关闭需要阀芯向下移动的距离h1就大(见图3(a));重量重时,预开口小,h2就小(见图3(b))。但是重量轻时的臂长比小,轴承1向下移动1 mm,阀芯也向下移动1 mm;而重量重时,臂长比大,轴承1向下移动4 mm,阀芯才向下移动1 mm,也就是重量轻时阀芯向下移动的速度快,重量重时阀芯向下移动的速度慢,这样可以保证在相同时间内让h1和h2都能同时变为0,也就是让阀口同时关闭,飞机同时停住。

图3 重量选择器摇块机构的臂长比Fig.3 Arm ratio of roll block manipulator for weight selector
2 控制原理
由阻拦装置基本工作原理可知,阻拦力的大小最终是反应在主液压缸内的液压压力上,因此,控制阻拦力的变化,也就是控制主液压缸中的压力变化,使其满足阻拦需求:一方面飞机在阻拦过程中过载要平稳,也即尽量保持阻拦力恒定;另一方面还需适应飞机重量变化。为了分析方便,将阻拦装置中的相关部件动滑轮柱塞、主液压缸、定长冲跑控制阀单独列出来,如图4所示。
由液压原理可知,单位时间内流过阀口的液压油流量Q是与阀口上下2端的压力差ΔP以及阀口面积A成正比,也即这三者之间存在以下关系:

其中,k1为1个与阀口形状、油液性质有关系的系数(常数)。而流过阀口的液压油也就是从主液压缸中排出的液压油,其流量大小可用主液压缸缸筒的移动速度v'和缸筒面积S的乘积来表示,而缸筒的移动速度与飞机滑跑速度v成正比,因此流量还可以表示为:
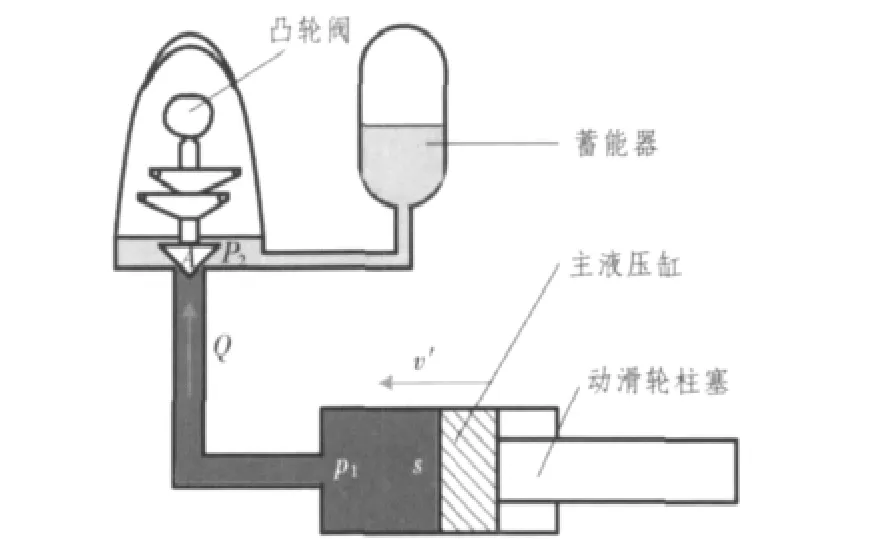
图4 定长冲跑控制阀控制原理Fig.4 Control principle of constant runout valve

其中,系数k2为缸筒移动速度与飞机滑跑速度间的1个比例因子,联合式(1)和式(2),消掉Q就可以求得

其中,k1,k2和S这3项都是常数,用另外1个系数k来代替,最终得到阀口面积A的表达式为:

由于阀口上端的液压油是流向蓄能器的,其工作压力在2~4 MPa之间,而主液压缸中的工作压力P1一般在60 MPa左右,因此P2的数值相对于主液压缸中的压力P1来讲是一个小量,可以近似地认为阀口上下两端的压力差ΔP也就代表了主液压缸中的压力P1。要满足过载稳定的需求,也就是要求ΔP不变,而飞机速度在滑跑过程中是逐渐减小的,因此也要求阀口面积逐渐变小;反过来,只要能控制好阀口面积的变化规律,让其与飞机速度的变化规律相同,就能保证ΔP不变,从而满足过载稳定的需求。同时,当飞机达到规定滑跑距离时控制阀口,让其完全关闭,面积为0,速度就为0,飞机停止向前滑行,就达到了定长阻拦的目的。所以,控制阻拦力变化使其满足过载稳定和定长阻拦2个需求都可以通过控制阀口面积的变化规律来实现。
当飞机重量增加时,所需阻拦力也需增加,也就是要增大ΔP。在初始条件下,由于飞机着舰的初始速度v0一定,由式(4)可知,要想增加ΔP,就必须减小阀口面积A,也就是阀的初始开口要变小。所以,要满足飞机重量变化的需求,只要控制阀的初始开口大小就可以实现,让飞机重量大时阀的预开口小,重量小时阀的预开口大。
3 重量设置对阻拦作业的影响
3.1 飞机重量设置偏小
假如在阻拦作业前飞机重量设置偏小,即阀的预开口偏大,液压油就能更容易流过阀口,因此在阀口上下产生的压力差ΔP就偏小,为飞机提供的阻拦力也偏小,则飞机在达到规定滑跑距离时速度还不能减为0,但由于阀口的关闭时机不因飞机重量设置而改变,即在此时阀口已完全关闭。由式(4)可知,面积A为0,速度v不为0,因此ΔP趋于无穷大,从而产生一个极大的过载,强行将飞机停下,整个阻拦过程中过载的变化如图5中虚线所示。由于过载太大,一方面可能超出飞行员或机体的承载能力,造成人员受伤或飞机损伤,另一方面还可能导致阻拦钢索断裂,造成机毁人亡的事故。

图5 重量设置偏小对过载的影响Fig.5 The influence of less weight setting on over loading
3.2 飞机重量设置偏大
假如在阻拦作业前飞机重量设置偏大,即阀的预开口偏小,液压油流过阀口比较困难,在阀口上下产生的压力差ΔP偏大,为飞机提供的阻拦力也偏大,在飞机还未达到规定滑跑距离时,速度就已减为0,整个阻拦过程中过载的变化如图6中的虚线所示。与重量设置偏小不同的是,在阻拦开始的瞬间,阻拦力迅速增加,产生1个过载极值,若此极值在飞行员或机体的承受范围以内,则阻拦作业是安全的,只是飞机的测距距离比正常时要短,一旦此极值超出了承受范围,则可能造成比重量设置偏小时更为严重的后果。

图6 重量设置偏大对过载的影响Fig.6 The influence of bigger weight setting on over loading
4 结语
本文分析了美国现役航母上配置的MK7-3型拦阻装置定长冲跑控制阀的结构组成特点,研究了阻拦力的基本控制原理,并讨论了飞机重量设置不准确对阻拦力过载的影响,经分析得到如下结论:控制阻拦力的关键是控制定长冲跑控制阀阀口面积的变化规律,飞机重量设置偏小和偏大都会引起阀口初始面积的变化,使得阻拦力过载产生突变,从而造成飞机损伤或者人员伤亡,甚至导致阻拦作业失败。
[1]欧讯.航母的拦阻装置[J].现代舰船,2005,(9):45-47.
[2]李杰,于川.航空母舰的舰载机着舰装备[J].现代军事,2006,(10):56 -58.
[3]MIKHALUK D,VOINOV I,BOROVKOV A.Finite element modeling of the arresting gear and simulation of the aircraft deck landingdynamics[R].EuropeanLS - DYNA Conference,2009.
[4]焦方金,靳红生.浅谈舰载机的降落[J].舰载武器,2005,(6):82 -85.
[5]黄胜,孟祥印,常欣.航母舰载机降落制动滑跑距离分析及预报[J].中国舰船研究,2009,4(2):11 -14.
[6]王海东,毕玉泉,杨炳恒,黄葵.MK7-3型拦阻装置滑轮运动特性分析[J].舰船科学技术,2011,33(2):75-77.
WANG Hai-dong,BI Yu-quan.Analysis on kinematics charactor of the block for MK7-3 arresting gear[J].Ship Seience and Technology,2011,33(2):75 -77.
Analysis on structure character and control rule of the constant runout valve for MK7-3 arresting gear
YANG Mao-sheng,BI Yu-quan,HUANG Kui,WANG Hai-dong,YANG Bing-heng
(Qingdao Branch of Naval Aeronautical Engineering Institute,Qingdao 266041,China)
Constant runout valve is the key component of arresting gear in aircraft carrier.In this article,the structure character is analyzed and the basic control principle of arresting force is studied,also the influence of inaccurate aircraft weight setting on over loading of arresting force.It has been found that it is likely to increase the over loading when the aircraft weight is set too light or too weight.It will cause aircraft damage and personnel casualty possibly,indeed the failure of arresting task.
aircraft carrier;arresting gear;constant runout valve;structure character
U674.771
A
1672-7649(2012)03-0140-04
10.3404/j.issn.1672-7649.2012.03.033
2011-06-02;
2011-08-22
杨茂胜(1976-),男,博士,工程师,研究方向为航空机械工程。
猜你喜欢
塑料包装(2020年4期)2020-09-24 01:19:26
塑料包装(2020年1期)2020-04-09 07:06:28
化肥设计(2019年3期)2019-07-02 07:59:54
汽车与驾驶维修(维修版)(2018年9期)2018-11-15 06:20:54
石油化工自动化(2018年5期)2018-11-14 02:34:30
汽车与驾驶维修(维修版)(2017年12期)2018-01-15 01:43:39
汽车与驾驶维修(维修版)(2017年6期)2017-09-03 08:50:58
工业设计(2016年7期)2016-05-04 04:02:06
设备管理与维修(2016年5期)2016-03-16 02:20:47
工程建设与设计(2016年4期)2016-02-27 10:51:16
