
一种低重频脉冲雷达的速度解算方法
2012-06-23 06:42李邦芹
电子科技 2012年5期
李邦芹
(中国电子科技集团公司第20研究所雷达部,陕西 西安 710068)
目前,低重频脉冲雷达以其测距清晰的特点,主要用于航天测控、军事预警侦察、气象测量、资源探测等领。因为雷达体制方面的限制,低重频脉冲雷达在测速时具有严重的速度模糊,所以一般不用于测速。但径向速度作为目标的重要特征参量,已成为现代雷达测量的重要元素,特别在机载雷达中,通过目标速度的测量,既可用于分辨真假弹头,进行目标识别,还可用于提高测距的精。脉冲多普勒雷达为适应战术应用的需要,对雷达的测速功能提出更高的要求,因此,需要找到一种方法,让低重频脉冲雷达具备测速的功能,以充分发挥雷达的测速作用。
MTD雷达是利用回波的多普勒信息来测定目标的速度。在动目标检测(MTD)中,通过利用窄带滤波器组来检测出多普勒频率fd的大小,根据关系式fd=2 vr/λ和雷达的工作波长λ,利用式(1)解算出目标的径向速度vr。因此对目标径向速度vr的测量便转换为多普勒频移fd的测量

1 多普勒频移的检测
1.1 FFT实现8通道窄带滤波器组
在雷达实际工作中,多普勒频移fd不能预知,因此需要采用一组相邻且部分重叠的滤波器组,覆盖整个多普勒频率范围0~fr,fr这就是窄带多普勒滤波器组。8通道窄带滤波器组具有8个输出的横向滤波器组。该滤波器组的频率覆盖范围为,为雷达工作的重复频率。如图1所示,横向滤波器有7根延迟线,每根延迟线的延迟时间Tr=1/fr。设加在8个输出端头的加权值,为[3]

式中,i表示第i个抽头;k表示从0~7的标记,每个k值对应一组不同的加权值,相应地对应一个不同的多普勒滤波器相应。
在8通道窄带滤波器组中,第k滤波器完成的运算是

用快速傅里叶变换(FFT)的算法完成式(3)的运算,即用FFT实现8个滤波器组。结果如图1所示。
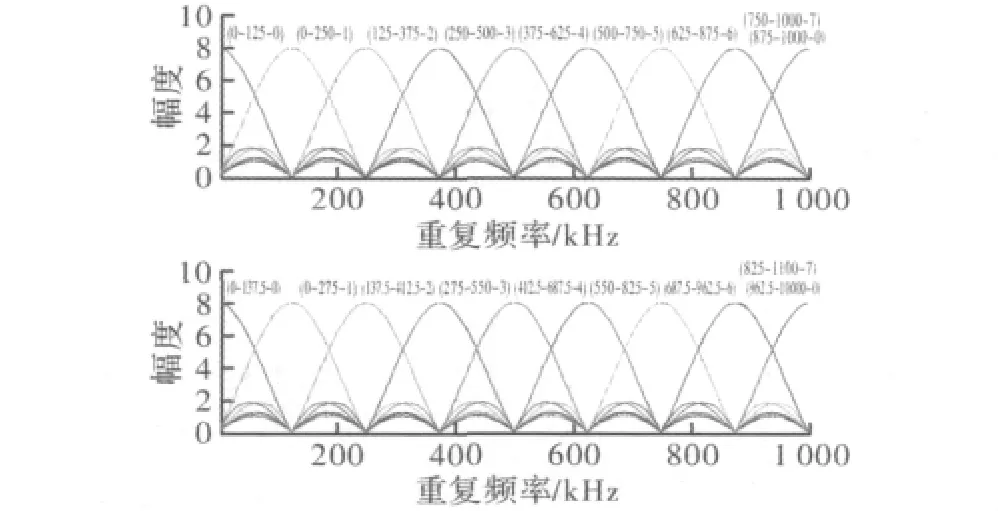
图1 FFT实现8通道窄带滤波器组
1.2 雷达速度解模糊算法
通常弹丸的速度为600~1000 m/s范围,多普勒频率范围为34500~63167 Hz,可以通过使用参差、速度插值、速度估计的方法实现测速[4]。
假设发射频率为f1,在重复频率1 kHz的条件下,MTD后检测的多普勒频率为fd1,模糊系数n1;在重复频率1.1 kHz的条件下,MTD后检测的多普勒频率为fd2,模糊系数 n2。令目标真实的多普勒频率为 fd,满足[5]

式(4)及式(5)包含3个未知数,无解。但式(4)、式(5)满足

1.3 模糊系数n1、n2的估计
分别在发射频率为34500 Hz和63167 Hz,弹丸速度最高限1000 m·s-1和最低限600 m·s-1条件下做仿真实验,结果如下表1和表2所示。
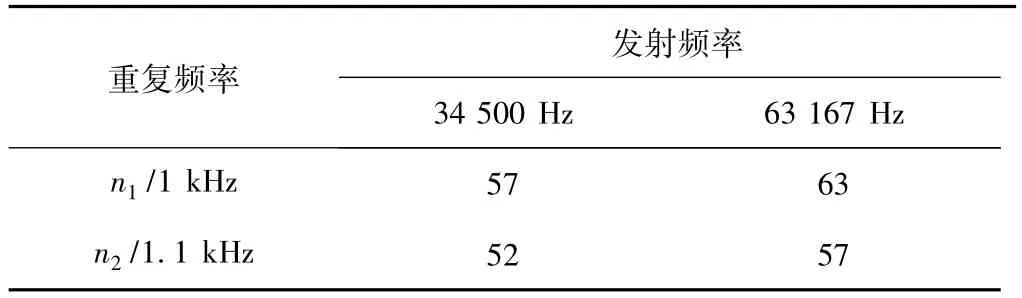
表1 速度为1000 m/s动目标模糊系数估计

表2 速度为600 m/s动目标模糊系数估计
对于同一目标,在发射频率不变的情况下,仅改变重复频率,不同重复频率下那么检测到的真实多普勒频率为fd是相等的,并且满足约束条件n2<n1。
根据测速范围600~1000 m/s的动目标,取n1和n2在两种重频条件下覆盖的最大范围:31<n<63,这样就可以遍历所有满足条件的n1和n2即设定误差因子 ε,n1和 n2满足

可以根据实际应用条件取合适的ρ值,求解出符合条件的n1和n2,根据式(4)及式(5)解算出多普勒频率fd。此时求出的fd在34500~63167 Hz频率范围存在几个解,其中只有一个解才是准确的目标多普勒频率。为了得到这个准确解,需要一个粗略速度引导值,由此解算出真正的多普勒频率fd。
2 仿真分析
2.1 仿真实验
基于参差的方式测速。仿真条件:雷达发射频率为X.XXX GHz,重复频率fr分别取1 kHz和1.1 kHz,测频范围为34500~57500 Hz。仿真结果如表3所示。
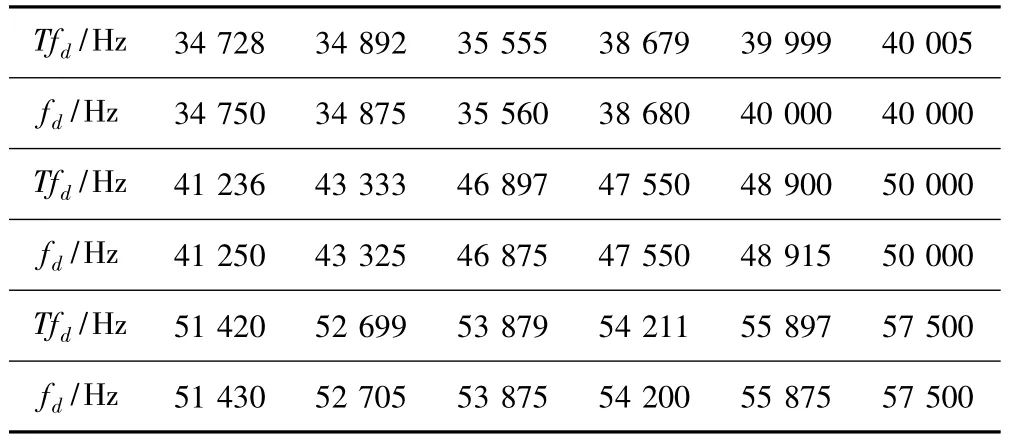
表3 参差方式检测目标多普勒频率
2.2 数据分析
上述的数据测试,以精度为5 Hz的插值解算,所以检测的多普勒频率都是5的倍数。如果要进一步提高测速精度,可以通过提高插值精度,这样可以更准确检测多普勒频率,实现精确测速,但信号处理时间会增加。
2.3 测速精度
以发射频率X.XXX GHz为条件,计算测速精度。仿真数据中最大误差为22 Hz,故计算的速度误差

因为速度误差<0.5 m/s,满足精确测速要求。
3 结束语
指出了低重频脉冲雷达存在严重的速度模糊,且一般不用于测速的缺点,进而提出一种低重频脉冲雷达的速度解算方法,利用FFT实现8通道窄带滤波器组,并通过参差、速度差值、速度估计实现测速。仿真实验表明此种方法满足精确测速要求,具有一定的理论意义和实用价值。在具体工程实践中,还需考虑发射频率稳定度、本振频率稳定度、光速、热噪声、计算误差等因素带来的测速误。
[1]王德纯.精密跟踪测量雷达技术[M].北京:电子工业出版社,2006.
[2]毛士艺,张瑞生.脉冲多普勒雷达[M].北京:国防工业出版社,1990.
[3]丁鹭飞,耿富录,陈建春.雷达原理[M].北京:电子工业出版社,2009.
[4]张昆辉.机载雷达手册[M].北京:国防工业出版社,2004.
[5]吴涛,屈强,袁嗣杰,等.一种低重频脉冲雷达速度模糊解算的新方法[J].系统仿真学报,2009,21(2):31 -42.
[6]杰里 L,伊伏斯,爱德华 K.现代雷达原理[M].北京:电子工业出版社,1987.
[7]徐敏.单脉冲测量雷达测速技术研究[J].现代雷达,2005,27(1):58 -61.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
电子制作(2019年11期)2019-07-04
山东冶金(2019年1期)2019-03-30
电子制作(2018年16期)2018-09-26
电子制作(2017年19期)2017-02-02
中外医疗(2016年15期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
火控雷达技术(2016年2期)2016-02-06
电子器件(2015年5期)2015-12-29
电视技术(2014年19期)2014-03-11
