
基于混合可靠性分析的协同优化方法
2012-06-22 05:42王星皓马纪明曾声奎赵雪梅
北京航空航天大学学报 2012年4期
王星皓 马纪明 曾声奎 赵雪梅
(北京航空航天大学 可靠性与系统工程学院,北京100191)
多学科设计优化(MDO,Multidisciplinary Design Optimization)是工程领域一种新的优化设计方法,其主要思想是通过充分利用各个学科之间相互作用的协同效应,获得系统整体的最优解[1].目前,MDO已经广泛地应用于航空航天、机械制造等领域.其中,协同优化方法(CO,Collaborative Optimization)是 Kroo[2]等人在一致性约束优化算法基础上提出的一种多级MDO算法,由于其结构简单且算法收敛性比较可靠,因此得到了较广泛的重视和应用.在MDO中,当输入变量发生波动,仿真模型产生不确定性时,系统的输出和学科间的耦合也就成为了随机变量,就产生了如何取得MDO可行解的问题,解决这样的问题称之为基于可靠性的多学科设计优化(RBMDO,Reliability-based Multidisciplinary Design Optimization).
国内外众多学者对RBMDO中高效的可靠性分析方法和协调方法进行了研究.文献[3]提出了用系统输出的响应面模型代替高计算成本的约束函数,基于响应面约束来进行最可能点(MPP,Most Probable Point)的搜索;文献[4]使用 ATC(Analytical Target Cascading)算法将RBMDO分解为多个基于可靠性的设计优化(RBDO,Reliability-based Design Optimization)问题,对每个RBDO问题采用顺序优化与可靠性分析(SORA,Sequential Optimization and Reliability Assessment)方法来解决;文献[5]提出了采用并行子空间方法的RBMDO方法,利用并行子空间来进行MPP的搜索和整个问题的优化;文献[6]等提出了一种MDO框架下的SORA方法,实现了可靠性分析与多学科优化的解耦;文献[7]提出了一种基于改进一次二阶矩方法的并行子空间优化方法,该方法由于不在优化过程中执行MPP的计算,因此效率更高.文献[8]等提出了可靠性分析的分层混合策略,在MDO的顶层和底层采用不同的可靠性分析方法,从而提高可靠性分析的效率.
针对不确定性MDO中计算成本高的问题,本文将协同优化方法与两种在计算精度和成本上各有优势的可靠性分析方法相结合,提出一种基于混合可靠性分析的协同优化方法.该方法在传统嵌套循环算法的基础上,通过估算优化迭代点与约束边界的距离,选择精度不同的可靠性分析方法,仅对靠近约束边界的点进行基于一次可靠性方法(FORM,First Order Reliability Method)的可靠性分析,其余点仅采用均值法粗略计算其可靠度.从而在保证分析精度的前提下,避免了在优化初期高成本的可靠性分析,有效地降低了计算成本,提高了计算效率.
1 现有可靠性分析方法
1.1 均 值 法
均值法[9]是在机械结构可靠性研究初期提出的一种方法,其基本思想是首先将非线性状态函数在随机变量的均值点处作泰勒级数展开并保留至一次项,近似计算状态函数的平均值和标准差.
假设状态函数g(X)是光滑的并且在均值处可以泰勒展开,在均值点处的状态函数可以表示为


式中,GMV代表一次项之和;H(X)代表高阶项系数ai通过数值微分或者最小平方法来计算,用数值微分方法估算Z函数,最少次数为n+1次.
只保留一次项,假设都为独立随机变量,Z的均值和方差可以近似为

可靠性指标可以表示为

从计算可靠性指标所需的系统分析次数来看,该方法是约束可靠性分析中效率最高的.但对于非线性的状态函数,均值法计算结果不够精确.
1.2FORM 法
1974年 Hasofer和 Lind[9]更加科学地对可靠性指标进行了定义,并引入了验算点的概念,提出了改进的FORM方法.该算法使用当量正态法将状态函数g(X)变换为g'(u).此时,设计验算点u*到坐标原点的距离为坐标原点到极限状态曲面(g(u)=0)的最短距离β,定义该值为可靠性指标.验算点法算法步骤为:
1)假定初始验算点.

2)根据设计验算点,计算非正态随机变量的等效正态分布参数.
3)计算可靠性指标.

4)计算重要度系数.

5)计算新的验算点.

FORM法能对可靠性指标进行精度较高的计算,是一种应用较为广泛的可靠性分析方法,但其计算成本较高.
2 基于混合可靠性分析的协同优化
本文提出的基于混合可靠性分析的协同优化方法是在标准的协同方法上提出的,仍具有协同优化各个学科自治性较高的优点,并针对每个子学科进行基于可靠性的设计优化过程进行了改进.
基于混合可靠性分析的协同优化方法的数学模型可描述如下:
系统级优化问题:

式中,f(Z)是整个系统的目标函数;Ji是第i个一致性等式约束,也是第i个子系统的目标,系统级设计变量包括学科之间的共享设计变量{}和学科间的耦合状态变量{}.
子系统的优化模型为:

式中,gk表示第p个可靠性约束条件;Rk为该可靠性约束的可靠度要求,子系统级的设计变量包括该子系统的局部设计变量{}、共享设计变量{}和耦合状态变量{}.
考虑到优化过程是一个从初始点逐步迭代,收敛到约束边界的过程,通过每次分析得到的可靠性值来判断该设计点与约束边界的距离,并以此为依据在下一迭代点的可靠性分析中选择合适的算法.通过在远离边界时选用效率较高的均值法,在边界附近选用精度较高的FORM法,在不影响最终优化结果可靠性精度的前提下,提高了效率.基于混合可靠性分析方法的系统级优化与标准的协同优化过程基本相同,其子系统进行优化的流程如图1所示.
1)在初始点处使用均值法进行粗略的可靠性分析,得可靠度R0;
2)初始点一般无法满足收敛条件,优化迭代产生新的设计点;
3)在对新的设计点进行可靠性分析之前,通过判断上次可靠性分析的结果来选择本次可靠性分析的方法.若满足|Rn-1-Rreq|<ε 且Rn-1≠1,则转步骤4),否则转步骤5).其中Rreq为该可靠性约束的可靠度要求,ε为均值法分析可能产生的最大误差,实际工程中可以根据经验取值;

图1 子系统级优化流程
4)采用FORM法进行可靠性分析,计算可靠性指标

式中,Xi为经多次迭代得到的MPP点,转步骤6);
5)采用均值法进行可靠性分析,计算可靠性指标为

式中,μz和σz为用近似方法得到的均值和方差,转步骤6);
6)计算可靠度

式中Φ(·)为标准正态分布函数;
7)判断本次优化是否满足收敛条件及可靠性约束,若满足就结束子系统级优化,否则优化迭代产生新的设计点,转步骤3),继续优化和可靠性分析,直至满足收敛条件为止.
3 算例试验
减速器优化算例是 NASA(National Aeronautics and Space Administration)评估多学科设计方法性能的10个标准算例之一[10].减速器多学科设计优化的目标是在满足减速器中转轴和齿轮大量约束的同时,使得减速器体积最小(即质量最轻).该优化问题有7个设计变量,其中x1为齿面宽度,x2为齿轮模数,x3为小齿轮齿数,x4,x5为轴承间距,x6,x7为大小齿轮轴的直径.
数学模型为
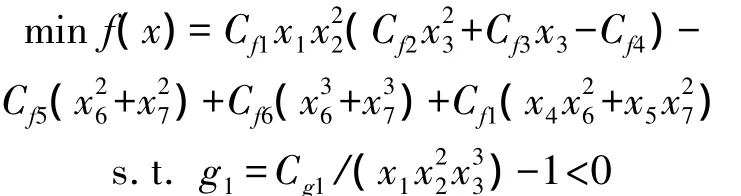
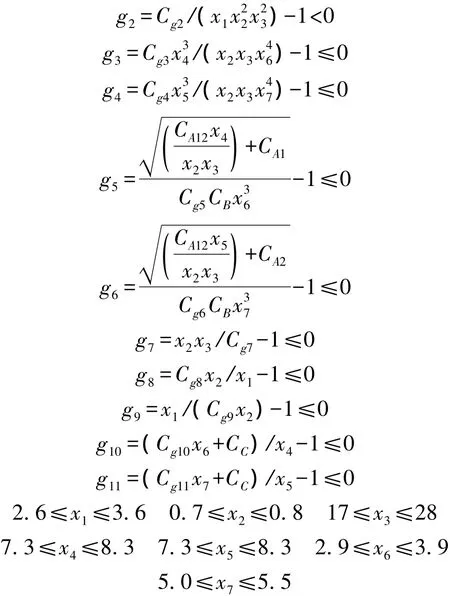
其中,g1为轮齿的最大弯曲应力;g2为轮齿最大接触应力;g3和g4为轴的横向最大挠度;g5和g6为轴内最大应力;g7,g8和g9为尺寸和空间限制;g10和g11为轴尺寸计算的经验公式.为了验算本文提出的算法,将x1-x2,x4-x7作为服从正态分布的随机变量,将g1-g4作为可靠性约束,取可靠度要求为95%,建立基于可靠性的协同优化数学模型,分别采用均值法、FORM法以及混合可靠性分析方法来进行可靠性分析.
系统级优化模型为


子系统1优化模型为

子系统2优化模型为

子系统3优化模型为

在优化过程中,系统级变量设为确定性变量,子系统级为服从实际分布规律的随机变量,分别以各设计量的上下限的中值点作为初始点,分别采用不同的可靠性分析方法进行优化,其计算成本和优化结果如表1和表2所示,并对约束的可靠性采用Monte-Carlo方法进行了分析,各个约束可靠性分析结果如表3所示.

表1 循环次数对比

表2 优化结果对比

表3 约束的可靠性分析
可以看到采用均值法的CO方法虽然计算成本较低,但部分约束(如本例中g1)不满足可靠性要求.基于混合可靠性分析的CO与采用FORM方法的CO得到的优化结果都满足要求,但基于混合可靠性分析的CO计算成本更低.
4 结论
1)将协同优化与两种基本可靠性分析方法相结合,提出了基于混合可靠性分析的协同优化的数学模型和计算流程,并通过算例验证其可行性.
2)基于混合可靠性的协同优化方法在保证可靠性精度的同时,有效减少了计算成本,有一定的工程应用价值.
References)
[1]Sobieszczanski-Sobieski,J,Haftka R T.Multidisciplinary aerospace design optimization:survey of recent developments[J].Structural Optimization,1997,14(1):1-23
[2]Kroo I M,Manning Valerie.Collaborative optimization:status and directions[C]//Proc ofthe 8th AIAA/NASA/ISSMO Symposium on Multidisciplinary Analysis and Optimization.Long Beach:AIAA,2000
[3]Sue R H,Oakley D R,Rhodes G S.Multidisciplinary stochastic optimization[C]//Proc of the 10th Conference on Engineer Mechanics Part 2,Vol 2.Boulder,CO:ASME,1995:934-937
[4]Liao G,Kim H M,Ha C.Multilevel optimization considering variability in design variables of multidisciplinary system[C]//Proceedings of the 11th AIAA/ISSMO Symposium on Multidisciplinary Analysis and Optimization.Portsmouth,Virginia,USA:AIAA,2006
[5]Padamanabhan D,Batill S M.An iterative concurrent subspace robust design framework[C]//Proc of 8th AIAA/USAF/NASA/ISSMO Symposium on Multidisciplinary Analysis and Optimization.Long Beach,California:AIAA,2000:133-138
[6]Fan Hui,Li Weiji.An efficient method for reliability-based multidisciplinary design optimization [J].Chinese Journal of Aeronautics,2008,21(4):335-340
[7]Du Xiaoping,Guo Jia,Beeram Harish.Sequential optimization and reliability assessment for multidisciplinary systems design[J].Struct Multidisc Optim,2008,35:117-130
[8]Li Liansheng,Jing Shikai,Liu Jihong.A hierarchical hybrid strategy for reliability analysis of multidisciplinary design optimization[C]//Proceedings of the 2010 14th International Conference on Computer Supported Cooperative Work in Design.Shanghai:IEEE,2010:525-530
[9]张建国,苏多,刘英卫.机械产品可靠性分析与优化[M].北京:电子工业出版社,2008
Zhang Jianguo,Su Duo,Liu Yingwei.Reliability analysis and optimization of mechanical products[M].Beijing:Publishing House of Electronics Industry,2008(in Chinese)
[10]Kodiyalam S.Evaluation of methods for multidisciplinary design optimization(MDO),PhaseI[R].NASA/CR-1998-208716,1998
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
铁道通信信号(2020年3期)2020-09-21
铁道通信信号(2020年11期)2020-02-07
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
数学大世界(2018年35期)2018-02-22
发明与创新·中学生(2017年5期)2017-05-12
小学阅读指南·低年级版(2017年1期)2017-03-13
人生十六七(2015年6期)2015-02-28
计算机辅助工程(2012年5期)2012-11-21
