
基于开关磁阻电动机的角度斩波控制研究
2012-06-19 09:08王世山
微特电机 2012年12期
侯 栋,李 江,王世山
(南京航空航天大学,江苏南京210016)
0 引 言
开关磁阻电动机以其结构简单坚固、调速性能优越、范围宽等优点成为调速系统中的新贵。由于其定、转子都为凸极结构,磁路的非线性及相电流的非正弦性等特点,导致转矩波动和噪声大。如何解决开关磁阻电动机的转矩波动和噪声,一直是电力传动界研究的热点[1-3]。
一般情况下,角度控制是在保持母线电压不变的情况下,通过改变开关角导通区间的大小来调节电机转速[4]。不同的开关角导通区间,电流的变化范围不同,从而电机转矩调节范围不同。此外,角度控制允许多相同时通电,增加了电动机输出转矩[5-6]。但是低速时电机转速小,反电动势小,要使电流峰值增加,必须进行限幅。所以角度控制不适用于低速状态。
另外,电压PWM控制是在开关角不变的前提下,采用对相绕组或者母线电压进行斩波,通过调节电压PWM信号的占空比来改变电流的大小,从而实现转速和转矩的调节[7-8]。这种方法既可以应用于高速调速系统,也能用于低速调速系统。但是,在同样的电源电压下,由于电压PWM控制的占空比不可能达到100%,相对于角度控制,绕组电感两端的电压小很多,使得高速阶段时转速和角度控制比较小,所以电机调速范围比较窄。
针对上述分析,本文提出了一种角度斩波控制,不仅具有角度控制调速范围大的优点,也具有电压PWM控制高低速调速的优点。这种控制方式依靠电压PWM调节电动机的转速和转矩,并使开关角随着转速的变化而变化。在这种工作方式下,转速和转矩调节范围大,高速和低速都有很好的电动性能。
1 开关磁阻电动机基本工作原理
开关磁阻电动机遵循磁阻最小原理[8],图1为电机模型截面图,采用常规的三相12/8结构。当仅A相绕组通电时,则会在A-A1轴线上建立磁场,转子受到磁力作用后,从而使转子极C-C1与定子极轴线A-A1重合,转子转动。若在重合时改为B相绕组通电,则此时B绕组磁场产生的磁力迫使转子极D-D1与定子极轴线B-B1重合,使电机持续转动。由此可见,改变绕组中的通电顺序就可以改变电机转动方向;改变绕组相电流的大小,就可以改变电机转矩的大小,从而实现稳定调速。
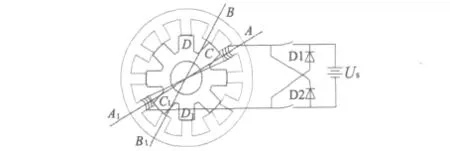
图1 SRM典型工作原理
当绕组通电时,会建立一个磁场储存能量,假设电感不随电流的变化而变化,仅仅和转子的位置有关系,由电磁场的基本理论可知,此时电磁转矩:
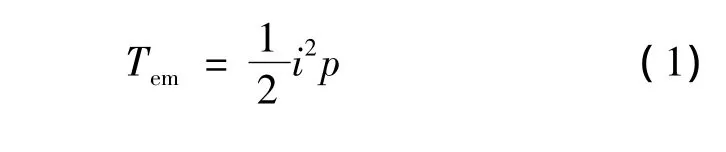
(1)开关磁阻电动机的电磁转矩是由p和i决定的,并且与i的方向无关。p和i越大,Tem越大。在电机本体确定的前提下,转速恒定时,p是不变的。因此只有通过增大i,才能增加Tem。然而电流的变化率不能太大,过大的电流变化率会造成转矩脉动,噪声也会增加。因此,合理的增加电流,并减小电流的变化率是提高电机性能的有效方法。
(2)根据式(1)可知,Tem∝p。因此,如图2所示,在电感曲线L(θ)上升区域通入电流i1产生正向电磁转矩,电机做电动运行。在电感曲线 L(θ)的下降段通入电流i2产生反向转矩,电机做发电运行。控制通电电流的大小和通断时间,则可改变电机的转矩、速度,改变电流通电顺序可以改变电机的转向。
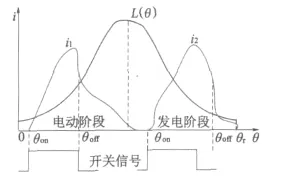
图2 典型电动发电电流模型
2 角度斩波控制
电机功率电路采用三相不对称半桥电路如图3所示。
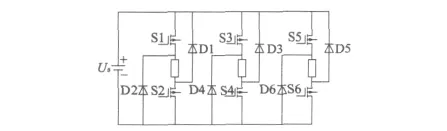
图3 三相不对称半桥主电路
当开关磁阻电动机给以恒定的直流源Us供电时,励磁模式下的电压平衡方程:

续流模式下的电压平衡方程:

式中:ie是励磁绕组电流;ic是续流绕组的电流;Us是端电压;ω是机械角速度。根据式(2)、式(3)可知,在励磁和续流阶段电流的变化率:
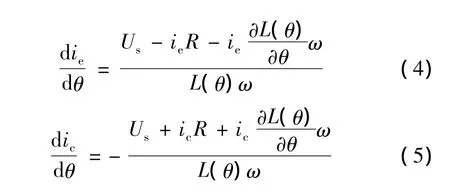
从式(4)、式(5)可以看出,无论是励磁阶段还是续流阶段,电流的变化率都与电压Us绕组电感L(θ)和电机角速度ω有关。
2.1 角度控制
角度控制主要是指对开通角θon和关断角θoff的控制[9],由前面的分析可知在电动运行时,应该使电流处于电感的上升区域。典型电动运行时的电流波形与开关角的关系如图4所示。

图4 典型电动运行电流波形
角度控制一般不适用于低速,由式(2)、式(3)可知,在低速运行时,由于反电势小,相绕组中的电流增大,如图4中的i1必须进行限流。当电机运行在高速段时,虽然电机的反电势增大,电流较低速时明显降低,如图4中的i2,转速调节范围也增大,但开关磁阻电动机的Tem与i的平方成正比,在保证输出功率的条件下必须强化励磁,此外由式(4)和式(5)可知,在换相后的电流变化率大,会产生较大的转矩脉动。
因此,为了改善电机在高转速条件下的输出特性,必须采用提前角开通。由式(5)可知,在续流阶段,随着角速度ω的增加,电流的变化率减小,为防止产生负转矩,使电动机一直处于电动状态需要提前关断角,一般情况下要使关断角小于θm。
总之,角度控制可以运用在低速和高速状态下,并且调速范围大。但是,低速时角度控制需要进行限流,相对于中低速而言,高速开关磁阻电动机的换相和励磁却很困难,影响了电机的性能。因此仅采用角度控制不能够解决励磁和换相时的转矩脉动问题。
2.2 电压PWM控制
电压PWM控制通过调节PWM的占空比来调节绕组或者母线电压,进而控制转速和转矩[10]。原理图如图5所示,通过调节PWM的占空比,使电流不断增加,当电流达到保护限时,则停止PWM信号输出,电流会一直减小到零。电压PWM控制相对角度控制通过调节占空比可以很好地控制电流的变化率,减小电机的转矩脉动。
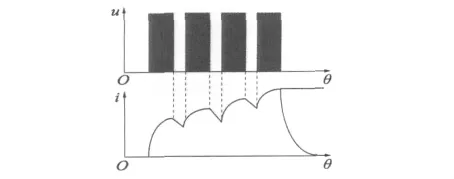
图5 电压PWM控制
按照图3的功率电路,在每一导通区间内,加在工作相绕组两端的平均电压U可以表示:

式中:D为电压占空比;Us为母线电压。当系统给定保护电流限后,根据负载的不同,针对直流母线电压变化的特性,可知:
转矩负载较小,电机工作在高速状态。根据式(4)和式(5)可知,换相后的电流变化率很小,此时电机的绕组电流没有达到保护的电流幅值,或者随着角度的变化稍稍超过保护电流,如图6中的曲线2和曲线3所示。此时,在导通区间,开关管处于开通状态,此时占空比D=1,式(4)可以近似:

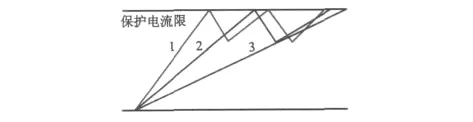
图6 电流上升变化关系
由于绕组电流的减小,电机在运转过程中电枢反应也不大,根据式(7)可知,感应电动势和母线电压Us相差不大,这使得在轻载时改变母线电压对电机的转速影响比较大。
转矩负载较大,电机工作在低速状态。根据式(4)和式(5)可知,换相后的电流变化率很大,此时电机的绕组电流频繁达到保护电流幅值,如图6中曲线1所示。电压占空比D<1,同时绕组内流过较大的电流,使得电机在运行过程中绕组内电枢反应较大,根据式(7),相绕组两端的线电压要较直流母线电压Us小许多,这就使得改变变换器直流母线电压对电机的转速影响不太大。
根据以上分析可知,在不同的负载下,电压PWM控制能够实现电流变化率的平滑过渡,减小转矩脉动,但是,在高速和低速的情况下母线电压对电机转速的影响比较大,使电压PWM控制的调速范围缩小。
2.3 角度斩波控制原理
针对角度控制和电压PWM控制的优缺点以及他们的应用场合,本文提出了角度斩波控制。既具有角度控制也具有电压PWM控制的优点,且不存在控制方式的互相转换。如图7所示,角度斩波控制首先设定电流斩波限,当电流达到斩波限时就关断开关管,在时钟信号的上升沿来时开通开关管。如图中三种开关管信号1、2、3,分别对应采样电流1、2、3。当电流没有达到斩波限时,采用角度控制和电压PWM控制,当电流达到斩波限时,进行斩波控制。
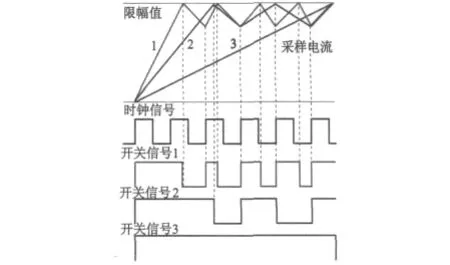
图7 斩波角度控制原理
根据前面的分析可知,负载不同电机会工作在不同的状态,从而在导通区间内,电流的波形会出现图7的三种曲线1、2、3,分别代表斩波严重、轻微斩波、不斩波。
当出现曲线1时,由式(5)可知,处于续流阶段,电流变化率比较小,如果此时仅仅固定关断角,电流则会延伸至电感的下降区域,从而处于如图2所示的发电状态,影响电动机的效率,因此角度斩波控制策略根据此时的转速和和电流信号,实时地改变开通和关断角度,同时调节母线两端电压PWM信号的占空比,使得电压从励磁阶段平滑地过渡到续流阶段,避免了因续流阶段电流变化率小而出现转矩脉动大的问题,另一方面也避免了角度控制不适合低速运行的情况。
当电机处于曲线2、3的状况时,电机处于高中速阶段,电流轻微斩波和不斩波,由于直流母线电流没有达到斩波限,角度控制在高速时有优势,因此根据电流信号和位置信号实时地调节开通角度和关断角度,另外为了防止角度控制在高速时励磁和换相的困难,通过调节母线电压的占空比,使得在电压在励磁阶段电压增大,同时增大续流阶段电流变化率,从而实现平稳换相。
2.4 角度斩波控制的实现
为获得良好的特性,采用模拟电流环加数字速度环的方式实现系统的双环控制,如图8所示。采用ALTERA公司的数字处理芯片EPM3256ATC144-7N以及TI公司的数字信号处理器TMS320F2407作为主控芯片,由后者经过DA输出至模拟电路,作为电路的斩波限。位置信号进入CPLD,通过不同的通电顺序,实现电机的正反转。同时位置信号进入DSP进行模拟处理消除干扰后再给CPLD进行换相,同时在进入DSP时,计算反馈速度,然后反馈速度与给定速度做PI调节,构成速度环。母线电流作为反馈电流经过斩波电路滞环控制后进入CPLD构成电流环。因此,形成电流和速度双闭环控制,如图9所示。此外系统采用单斩波控制,即同一个桥臂中采用上管斩波,下管不斩波。
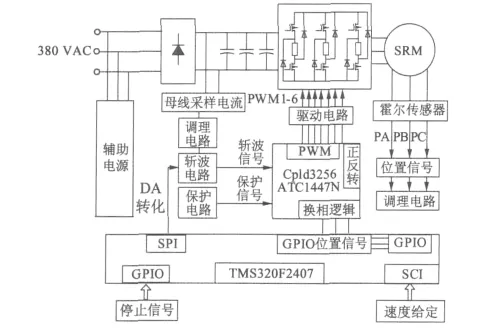
图8 开关磁阻电动机控制系统结构图
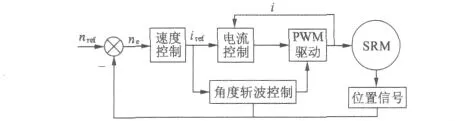
图9 〛开关磁阻电动机控制系统框图
3 控制特性的仿真和实验
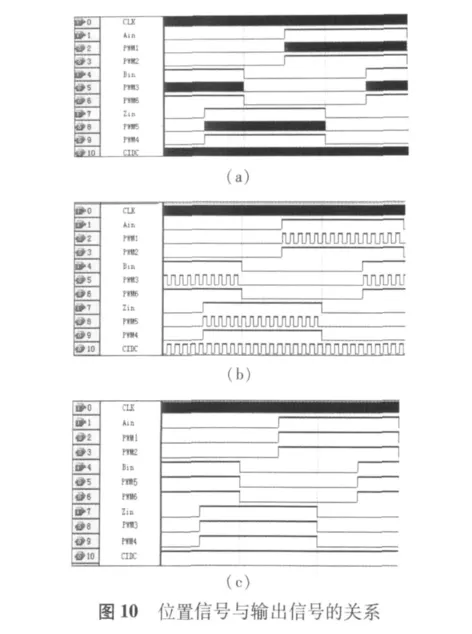
采用软件QuartusⅡ,仿真位置信号与输出信号的关系如图10所示。其中6路输出信号分别是PWM1 -6,CIDC 代表斩波程度,Ain、Bin、Zin代表三个位置信号。由于采用单斩波控制,从三个图中可以看出,上管1、3、5随着斩波程度的不同,可以自动地调节输出信号的占空比而改变斩波频率,当电机在低速时,斩波程度严重,如图10(a)所示,斩波频率最大,当电机在高中速时,斩波程度轻微或者不斩波,如图10(b)、图10(c)所示,斩波频率减小,如图10(b)所示,或为零(图10(c)所示)。
在仿真的基础上,对一台3 kW三相12/8的开关磁阻电动机进行实验。通过对实验和仿真得到的电流波形进行比较,可以看出两者在变化规律上有很好的一致性。
从图11中可以清楚地看出,开关管的信号是单斩波,采用上管斩波下管不斩波的斩波方式。从图12可以看出,直流母线电压在电压PWM控制的作用下,在导通区间电压一直在跌宕上升,和图5的原理相一致,能够充分体现电压PWM控制的特点。
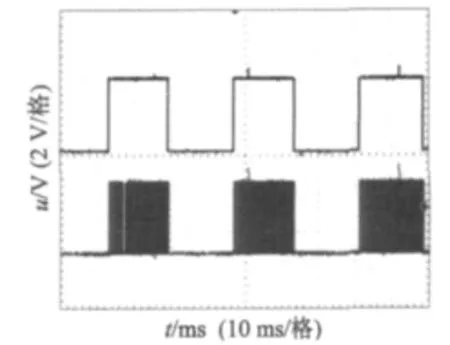
图11 A相电流上下管开通信号
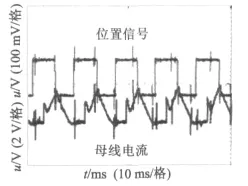
图12 位置信号与直流母线电压
角度控制不仅具有如图11所示的电压PWM控制的特点,而且具有角度控制的优点,从图13提前60°电角度时电流和位置信号的关系中可以看出,提前角度控制可以提高换相后电流上升率,降低转矩脉动。
针对开关磁阻电动机本身具有的转矩脉动大的缺点,本系统也可以采取变斩波限角度控制,在系统运行时,根据运行时的实际情况设计不同的斩波限,从而可以有效地解决电感上升区域开始阶段电流上升过慢的问题,实现减小电机转矩波动,降低噪声的目的。图14、图15为设置了变斩波限时电流和位置信号的关系,从波形图中看出,变斩波限控制可以有效地增加换相后电流上升率,从而降低转矩脉动。

图13 提前60°电角度位置与电流信号
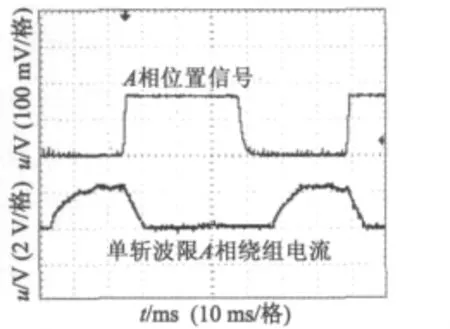
图14 单斩波限位置信号与相绕组电流
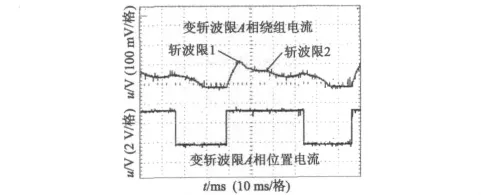
图15 变斩波限位置信号与相绕组电流
4 结 语
本文以3 kW开关磁阻电动机为研究对象,针对其转矩脉动和噪声大的缺点,提出了一种新的控制策略,能够降低转矩脉动,减小噪声。得到以下结论:
(1)角度斩波控制既可以在低速时利用电压PWM控制,也可以在高速时利用角度控制。而且是在线时刻变化提前角度控制。
(2)低速时角度控制无法限制电流峰值时可以自动转化至电压PWM控制,通过调节占空比实现降低电流峰值的目的。
(3)高速时,采用角度控制,同时利用电压PWM控制,通过调节母线电压的占空比使续流阶段电流变化率增大,电流迅速减小,从而防止产生制动转矩。
(4)斩波限提高了系统保护性能。当系统程序出现错误时,采样电流大于斩波限时,电流给定等于斩波电流限,从而保护系统稳定。
[1]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2010.
[2]秦海鸿,王慧贞,严仰光.双凸极永磁式两种斩波控制方式的比较[J].电力系统及其自动化学报,2008,17(4):2 -3.
[3]申伯纯,林锋,张晓丽.五相开关磁阻电动机及其调速系统[J].电机技术,2011,12(3):3 -4.
[4]周俊.基于DSP的无位置传感器开关磁阻电机控制的研究[D].天津科技大学,2009.
[5]李红梅,张志全,李忠杰.减小小功率开关磁阻电机转矩脉动的迭代学习控制[J].电工技术学报,2006,21(10):67 -70.
[6]Sahoo N C,Xu J X,Panda S K.Low torque ripple control of switched reluctance motors using iterative learning[J].IEEE Trans.on Energy Conversion,2001,16(4):318 -326.
[7]聂兵.开关磁阻电机的工作原理分析[J].工业控制计算机,2011(5):5-6.
[8]乔维德.开关磁阻电机调速控制策略的仿真研究[J].电气传动自动化,2012,34(1):19 -21.
[9]孙剑波,詹琼华,王双红,等.开关磁阻电机减振降噪和低转矩脉动控制策略[J].中国电机工程学报,2008,25(12):134 -138.
[10]Mir S,Elbuluk M E,Husain I.Torque - ripple minimization in switched reluctance motors using adaptive fuzzy control[J].IEEE Trans on Industry Applications,1999,35(2):461-468.
猜你喜欢
大电机技术(2022年5期)2022-11-17
防爆电机(2021年4期)2021-07-28
山东电力高等专科学校学报(2019年5期)2019-11-01
电子制作(2018年19期)2018-11-14
课程教育研究·学法教法研究(2018年20期)2018-08-11
自动化与仪表(2018年7期)2018-07-31
中国设备工程(2017年24期)2017-12-28
电子制作(2017年1期)2017-05-17
照明工程学报(2016年3期)2016-06-01
电测与仪表(2016年1期)2016-04-12
