
风洞模型位移视频测量的相机标定
2012-06-15 01:27:52王爱玲张征宇黄诗捷王水亮
实验流体力学 2012年5期
王爱玲,张征宇,黄诗捷,王水亮,赵 涛
(1.中国空气动力研究与发展中心 空气动力学国家重点实验室,四川 绵阳 621000;2.西南科技大学 信息工程学院,四川 绵阳 621010)
风洞模型位移视频测量的相机标定
王爱玲1,张征宇1,黄诗捷2,王水亮2,赵 涛2
(1.中国空气动力研究与发展中心 空气动力学国家重点实验室,四川 绵阳 621000;2.西南科技大学 信息工程学院,四川 绵阳 621010)
相机的制造和装配误差难以完全消除,导致相机的光学系统存在不同程度的非线性光学畸变现象,故相机标定对确保风洞模型位移视频测量的精度至关重要。针对1m2以上的台阶标定块制造成本高、维护困难,提出基于距离标尺的相机标定方法,推导包含非线性畸变模型的共线方程,建立适应中国大尺寸风洞的低成本相机标定系统,确保模型位移视频测量相机的自校正精度。2m超声速风洞的某跨大气层飞机测力试验中,采用该方法校正DALSAR○相机后,各阶梯迎角测量精度σα≤0.00772°(达到高速风洞测力试验迎角精度的先进指标),因此具有实用价值。
模型位移测量;风洞试验;相机标定;测量精度;误差分析;视觉测量
0 引 言
随着大尺寸跨声速、超声速风洞的逐步应用,将试验模型视为刚性体的假设不再成立,亟需获取模型位移、姿态角、变形等测量数据,以修正试验数据以提高试验数据精度[1-6]。
模型位移视频测量作为一种“非接触式”测量技术受到国内外风洞工作者的关注。国外在这方面进行了深入研究,技术成熟,如美国从20世纪80年代开始研究该项技术,通过精确测量粘印在模型上的标识点,计算出扭转、弯曲和迎角,现已应用于各种低速、高速、超高速风洞模型的运动轨迹、变形和姿态角的测量[1-6]。在国内,空气动力学国家重点实验室已率先建立模型位移视频测量的相机位姿确定技术,并在中国空气动力研究与发展中心高速所2.4m跨声速风洞成功开展了模型位移视频测量实验[7]。
鉴于相机的光学系统并非严格按照针孔摄像机模型工作,存在镜头畸变,影响模型位移视频测量精度,尤其是对于大景深视频检测(指清晰成像时待测物在物方空间前后检测范围大),镜头畸变对待测物的高程检测精度影响极大[1-12]。因此,通过相机标定,恢复摄影中心、模型上待测点及其像点间的正确几何关系,对于确保模型位移视频测量精度至关重要。
目前,国外采用高精度的台阶标定块进行相机标定[1-6]。图1为美国国家航空航天局(NASA)采用的标定块,其标定方法包含了确定相机位置与姿态的最小二乘法和确定相机畸变与焦距等参数的最优化方法[6],不足之处在于:制造与维护成本高(尤其是台阶标定板尺寸超过1m后,其制造与维护费用剧增至十几万到几十万),因为这类台阶标定板要求其上标志点的坐标都要非常精确,并需要恒温恒湿存放环境[11]。
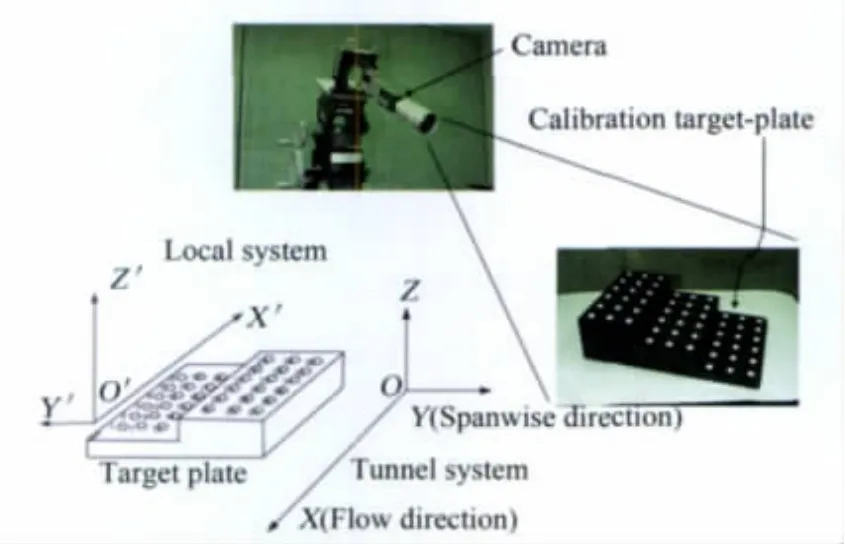
图1 美国国家航空航天局(NASA)采用的标定块Fig.1 Step calibration object used by NASA
为此,提出基于距离标尺的相机标定方法,以建立适应我国大尺寸风洞的低成本相机标定系统。
1 基于距离标尺的相机标定
1.1 原理
共线方程描述了相机、模型上待测点及其像点3者的数学模型,考虑镜头畸变后其表达式如下:
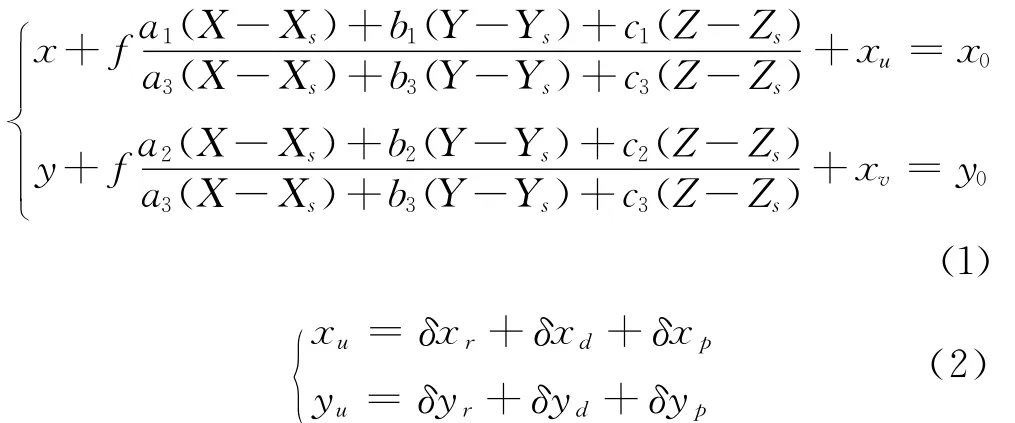
式中:(x0,y0)分别为相机像平面中心,f为相机焦距,(Xs,Ys,Zs)分别为相机在地面坐标系下的位置坐标,(a1,a2,a3,b1,b2,b3,c1,c2,c3)为相机姿态角(φ,w,k)所组成的旋转矩阵R中9个方向余弦,(x,y)与(X,Y,Z)分别为模型上粘印待测点的像平面坐标与地面坐标系下的坐标。
式(2)同时考虑了径向畸变、偏心畸变和薄棱镜畸变,具体计算公式如下:
因此,利用光束平差法[9-10]求解式(1),即可通过多幅检测图像解得6个镜头畸变参数k1、k2、p1、p2、s1和s2。其中,光束平差法是一种把已知点的像点坐标、待测点的像点坐标以及畸变参数、相机位姿数据的一部分或全部均视作观测值,同时求解的解算方法[9-10]。
1.2 标定方案设计
标定系统采用如图2所示的标尺,标尺上的编码点采用高精度的测量设备(如3坐标测量机)测量出各个编码点间的距离参数,因此加工、使用和维护都很方便。

图2 相机标定采用的标尺Fig.2 Calibration rule
具体的相机标定方法如下:
(1)围绕图2标尺从多个角度拍摄一组图像序列,确保标尺编码点在相机CCD上的成像坐标不同,并尽量使图像序列中标尺编码点在相机CCD各个方位都有成像;另外,要求标尺成像清晰、亮度与对比度好;
(2)对选取的图像进行编码点识别,并得到编码点中心的图像坐标;
(3)将编码点距离作为约束方程,畸变参数和相机位姿参数作为待求解量,编码点三维坐标作为初值,利用光束平差法联解式(1)与编码点间的距离方程,得到6个镜头畸变参数k1、k2、p1、p2、s1和s2。
2 相机标定实验
2.1 实验设备及方案
采用Microsoft Visual Studio 2005的C#语言开发了相机标定软件。标定系统采用的具体硬件如下:DALSAR○的相机(分辨率为400万像素,成像幅面为17.4mm×12.8mm)、图像采集电脑、35mm 定焦镜头和标尺。在中国空气动力研究与发展中心的2.4m跨声速风洞试验段,通过旋转与小幅移动相机,从不同视角以标尺为目标采集了36幅图像,从中选取32幅成像清晰、亮度与对比度好的图像,图3(a)和(b)分别为开发的相机标定软件处理第1幅与第2幅图像的界面,图中绿色数字为编码点编号,红色数字为选中的标尺上编码点编号。
分别从选取的15幅图像中分别选定2、4、6、8、12、16、24、28与32幅计算出的6个镜头畸变参数如表1所示,随采集照片数量的变化趋势如图4所示。

图3 相机标定软件的图像处理界面Fig.3 Interface of calibration soft for image recognition

图4 DALSAR○的相机畸变系数变化趋势图Fig.4 Tendency of distortion coefficients with the number of pictures
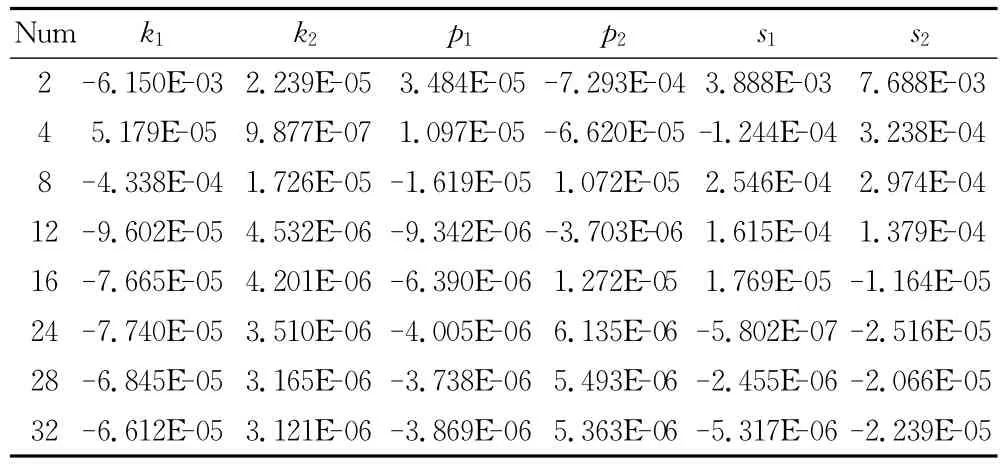
表1 DALSAR○相机畸变系数变化趋势Table 1 Tendency of distortion coefficients
2.2 数据分析
从表1中数据和图4可知:当选定的图像超过12幅后,解出的6个镜头畸变参数逐渐稳定。当选定2幅图像时解出的畸变参数较大,原因在于参与计算畸变参数的编码点总数量为48,并且在CCD上成像位置分布尚不均匀,导致光束平差法解得的畸变参数未真实反映相机的畸变现象,使用该畸变参数将使某些位置的像素点的改正量极小,而其它位置的改变量较大,引起畸变参数失真现象;当选定图像数量从4增加到12,参与计算畸变参数的编码点总数量从96增至288个,由于采集的照片视角不同,标尺上编码点与洞体上编码点的成像坐标一般不同,其成像位置在CCD上各个方位都开始有分布,因此计算出的镜头畸变参数值迅速减小,开始收敛;当选定图像数量从16增加到32,参与计算畸变参数的编码点总数量从384增至768个,其成像位置在CCD各个方位基本都有分布,因此,计算出畸变参数值已经收敛,变化极小,即此时再增加参与计算畸变参数的编码点数量,对于提高畸变参数解算精度效果不明显。
可见,当从不同角度围绕标尺拍摄的图像序列数量超过28以后,参与计算畸变参数的编码点总数量达到672个,即当参加标定的编码点在相机CCD各个方位都有成像,这里提出的相机标定方法可以得到正确的镜头畸变模型。采用表1中Num为28时的畸变参数代入式(2),校正用DALSAR○相机在2.4m跨声速风洞中某无人机试验时采集的试验图像中试验段底部的编码标记点的像素坐标,再采用模型变形视频测量的相机位置坐标与姿态角确定技术[13],通过式(1)得到试验段底部的编码标记点的三维坐标如表2所示,表中采用的相对误差计算式为:

式中:ε为相对误差,Δlmax为像点残差(像点真实值与计算值之差)的最大值,R为相机成像幅面的对角线长度。与未作校正的结果(如表3所示)比较,解算的试验段底部的编码标记点的像点残差均有所下降,其中47号点像点残差从1.350E-03降至1.5575E-04。

表2 相机解算数据(校正)Table 2 3Ddata with camera correction
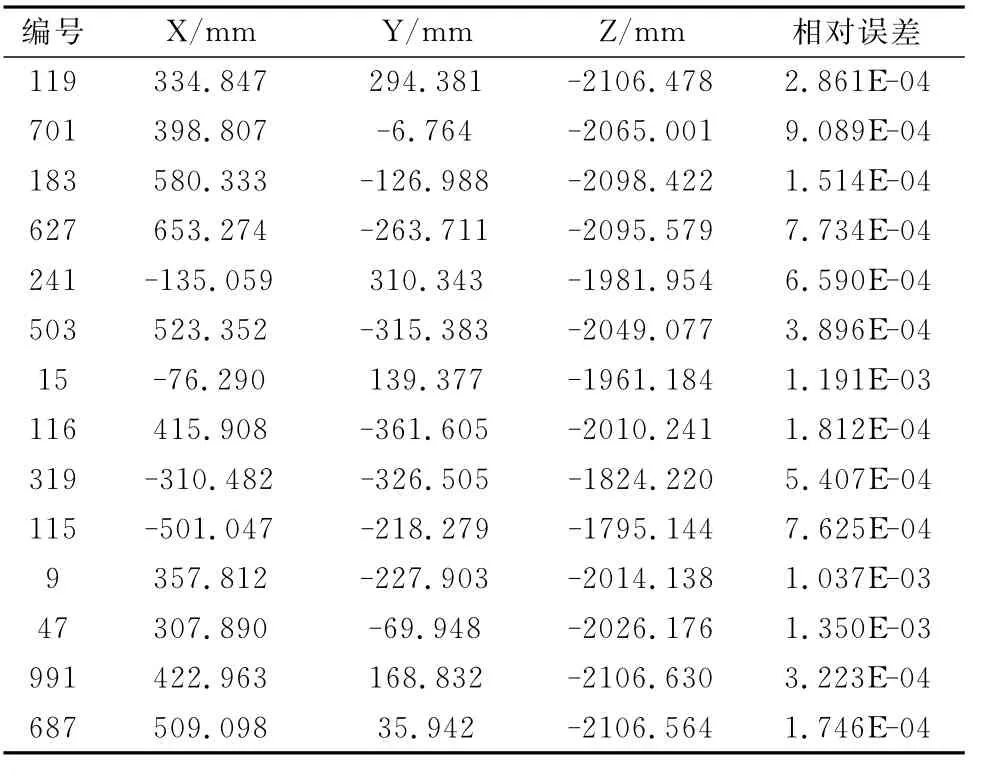
表3 相机解算数据(不校正)Table 3 3Ddata without camera correction
3 在模型姿态角视频测量中的应用
在中国空气动力研究与发展中心高速所的2m超声速风洞中,采用本方法校正DALSAR○相机的光学畸变,以提高风洞模型上标记点三维坐标测量精度,从而确保模型姿态角的测量精度。如图5所示,某跨大气层飞机在气动力作用下的迎角视频测量数据,表4为连续测量10次时,各阶梯迎角测量估计值的标准差,其中最大值为0.002442°,各阶梯迎角测量数据的最大标准差为0.00772°,表明采用本方法标定相机后,模型姿态角视频测量系统的迎角精度σα≤0.00772°,迎角精度达到高速风洞测力试验的先进指标[14]。

图5 某跨大气层飞机模型的迎角视频测量Fig.5 Videogrammetric angles of attack for an orbiter model

表4 某跨大气层飞机模型迎角视频数据的不确定度Table 4 Uncertainty of angles of attack for an orbiter model
4 结 论
针对面积在1m2以上的台阶标定块制造成本高、维护困难,提出基于距离标尺的相机标定方法,建立适应我国大尺寸风洞的低成本相机标定系统,DALSAR○相机(35mm定焦镜头)的标定实验表明本方法正确;在2m超声速风洞某跨大气层飞机测力试验中,采用本方法校正DALSAR○相机后,各阶梯迎角精度σα≤0.00772°,迎角精度达到高速风洞测力试验的先进指标,因此具有实用价值。
[1]LE SANT Y,MIGNOSI A,DELÉGLISE B.Model deformation measurement(MDM)at Onera[R].AIAA 2007-3817.
[2]LIU T,BURNER A W,PAPPA R.Photogrammetric techniques for aerospace applications[R].AIAA 2008.
[3]DANNY A BARROWS.Videogrammetric model deformation measurement technique for wind tunnel applications[R].AIAA 2007-1163.
[4]LE SANT Y,MERIENNE M C,LYONNET M,et al.A model deformation measurement method and its application on PSP measurements[R].AIAA 2004-2192.
[5]BURNER A W,WILLIAM A.Aeroelastic deformation:adaptation of wind tunnel measurement concepts to fullscale vehicle flight testing[R].RTO-MP-AVT-124.
[6]周述光,温渝昌,金启刚,等.风洞模型位移光学测量技术应用综述[J].实验流体力学,2009,23(2):94-99.
[7]AHMED M.Nonmetric calibration of camera lens distortion:Differential methods and robust estimation[J].IEEE Transactions,2005,14(8):1215-1230.
[8]ZHANG Z.A flexible new technique for camera calibration pattern analysis and machine intelligence[J].IEEE Transactions,2002,11(22):1330-1334.
[9]冯文灏.近景摄影测量-物体外形与运动状态的摄影法测定[M].武汉:武汉大学出版社,2002.
[10]黄桂平,叶声华,李广云.数字近景工业摄影测量关键技术研究与应用[D].天津大学,2005.
[11]徐立艳.摄像机标定多视点校正算法[D].山东大学,2008.
[12]张征宇,黄诗捷,罗川,等.基于共面条件的摄像机非线性畸变自校正[J].光学学报,2012,32(1):1-6.
[13]罗川,张征宇,孙岩.模型变形视频测量的相机位置坐标与姿态角确定[J].实验流体力学,2010,24(6):94-99.
[14]恽起麟.实验空气动力学[M].北京:国防工业出版社,1991:190-193.

王爱玲(1972-),女,河北故城人,硕士。研究方向:几何量测量、非接触测量。通讯地址:四川绵阳中国空气动力学研究与发展中心(621000),E-mail:wangai_ling@yeah.net
Camera calibration of model displacement videogrammetric measurement in wind tunnel
WANG Ai-ling1,ZHANG Zheng-yu1,HUANG Shi-jie2,WANG Shui-liang2,ZHAO Tao2
(1.State Key Laboratory of Aerodynamics,China Aerodynamics Research and Development Center,Mianyang Sichuan 621000,China;2.Information Engineering College,Southwest U-niversity of Science and Technology,Mianyang Sichuan 621010,China)
Camera calibration is crucial for the measure precision of model displacement in wind tunnel test,because the fabricating and assembling errors of the camera optical system cannot be removed which results in nonlinear distortion between real image and ideal image to some extent.When the area of calibration target-plate is more than 1m2,its cost of fabrication and maintenance is very high,therefore,a camera calibration method based on known distance ruler is introduced.Collinear equations with nonlinear distortion coefficients are deduced to ensure selfcalibrating accuracy,and the low-cost calibration system is constructed.The videogrammetric angles of attack for an orbiter model in 2msupersonic wind tunnel test,which uses this method to calibrate two DALSA○Rcameras,have demonstratedσα≤0.00772°(reach the advanced precision of attack angle for high speed wind tunnel),therefore it is useful and effective.
model displacement measurement;wind tunnel test;camera calibration;measurement accuracy;error analysis;videogrammetry
O432.2
A
1672-9897(2012)05-0074-05
2011-04-11;
2012-05-15
四川省科技创新苗子工程;国家自然科学基金(51075385)
猜你喜欢
都市(2022年12期)2022-03-04 09:12:08
今日农业(2021年11期)2021-11-27 10:47:17
北京航空航天大学学报(2021年6期)2021-07-20 07:23:52
小哥白尼(野生动物)(2020年3期)2020-07-27 01:54:04
公民与法治(2020年3期)2020-05-30 12:29:42
数学大王·中高年级(2018年11期)2018-12-17 08:13:54
测控技术(2018年10期)2018-11-25 09:35:58
中国卫生(2015年9期)2015-11-10 03:11:30
科技传播(2014年4期)2014-12-02 01:59:42
实验流体力学(2011年5期)2011-01-14 01:25:24
