基于视觉的多方位闯入监控无线报警系统*
2012-05-14 11:33:28方榕华王朝云冯学思
网络安全与数据管理 2012年15期
方榕华,陈 恳,王朝云,冯学思
(宁波大学 信息科学与工程学院,浙江 宁波 315211)
随着生活水平的不断提高,人们越来越重视自己的个人安全和财产安全,以嵌入式视频服务器为核心的监控系统也不断向前发展,它具有性能稳定可靠、实时性好、抗病毒能力强等特点,具有较高的实际应用价值。但适用于此监控系统的模块普遍操作复杂,可移植性差,不易携带,不易于实时监控。为此,在本设计中,采用LPC2103作为控制模块,LM1881对视频信号进行采集分离,多个监控模块实时检测并进行多点到C8051F020移动监控设备的无线传输,进行实时监控实时处理。
1 系统设计方案
多方位闯入监控无线报警系统主要由多个模拟摄像头、控制模块、蜂鸣器模块、无线传输模块以及一个图像显示屏和移动监控设备等构成。监控模块包括模拟摄像头、控制模块、蜂鸣器模块和无线发送模块。控制模块主要由基于ARM7内核的集成芯片LPC2103及标准外围电路组成;无线传输模块由2.4 GHz频段2 Mb/s高速嵌入式无线数传芯片NRF24L0及外围元件组成;移动监控设备由C8051F020单片机及其按键电路、JTAG接口等构成。
整个系统中多个监控模块中的每一个模块首先将模拟摄像头图像信号转换为可数字处理的电信号,一路送至图像显示屏显示,一路送至视频同步分离模块,分离出行同步信号、奇偶场同步信号,并传输给控制模块LPC2103芯片。LPC2103对这些信号进行处理后,输出相应的控制信号到蜂鸣器模块和无线传输模块,再传至移动监控设备,等待上一级监控系统控制指令。若有指令,则通过无线传输模块传至LPC2103并作出相应的应答信号。系统结构框图如图1、图2所示。

图1 监控模块框图

图2 系统整体结构框图
2 系统硬件设计
2.1 信号采集与分离
首先CCD图像传感器把光学信号转变成电信号(即视频信号),LM1881对视频信号进行分离,而LPC2103对视频信号进行采集。如图3所示。

图3 信号采集分离电路
CCD摄像头数据采集的速率是25帧/s,一帧分奇偶两场,即50场/s,场扫描时间为20 ms,每场312.5行,行扫描时间为 64μs,行同步时间是为 12μs,场同步时间2.024 ms。在不进行其他数据处理的情况下,只对其中的偶场进行采集就能以足够的精度辨别闯入物体的功能,因此在本系统中只对偶场进行采集[1]。
摄像头视频信号端接LM1881[2]的视频信号输入端2脚,同时将该信号接入 LPC2103的 P0.23(即 AIN1)进行模数转换,并把结果储存到寄存器里。LM1881的行同步信号端(引脚1)连接LPC2103的一个带中断能力的I/O口(选用EINT2口即P0.14)。LM1881的奇-偶场同步信号输出端 7脚接 LPC2103的EINT1(P0.16)。在此,选择奇-偶场同步信号作为换场的标志信号,而不是选用LM1881引脚3输出的场同步信号。这样做的好处是,当摄像头信号处于奇场或偶场时,则奇-偶场信号整场都相应地处于高电平或低电平,若检测到该信号发生变化,就可以知道摄像头信号换场了。因为每场信号持续的时间相对较长,所以也不用担心漏检到换场的发生。
因为LPC2103内部A/D转换的频率固定,从数据可靠性与稳定性的角度考虑,选择每行采集50个点,每场采集50行,这样,OV5116数据采集模块每场的数据变换成一个50行50列的二维数组。由于A/D采集的参考电压为3 V,而视频输入信号的电平在0 V~1.5 V,所以A/D采集结果是在0~500之间的一个二维数组[3]。
2.2 控制模块
LM1881芯片分离出行同步信号、奇偶场同步信号,并传输给LPC2103芯片的两个I/O端,LPC2103芯片的6个 并 行 输 入 输 出 I/O 端 (PIO0_3、PIO0_7~PIO0_10、PIO0_15) 与无线传输模块的 6个引脚 (PIN3~PIN8)连接,LPC2103芯片的PIO0_17与蜂鸣器模块相连接;当CCD摄像头将图像信号变为电信号,A/D采集模块进行图像数据采集,将采集到的图像数据传输到LPC2103芯片中时,控制模块同时接收到LM1881分离出的行同步信号(下降沿触发)和奇偶场同步信号(下降沿触发),控制模块进行相应处理,并输出信号到蜂鸣器模块和无线传输模块,再传至移动监控设备,等待指令。控制模块电路图如图4所示。
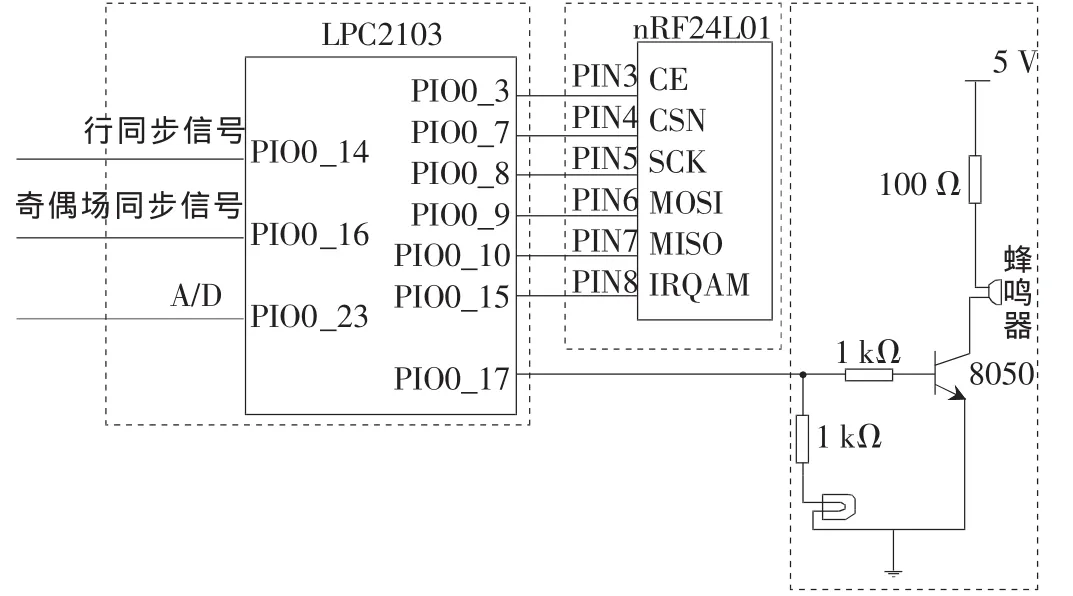
图4 控制模块电路图
2.3 无线传输模块
NRF24L01[4]工作在 2.4~2.5 GHz,供电电压范围为1.9~3.3 V,最大发射功率为 1 mW;有 126频道,满足多点通信和跳频通信需要;内置硬件CRC检错和点对多点通信地址控制;收发模式有增强型ShockBurstTM收发模式、ShockBurstTM收发模式和直接收发模式三种,收发模式由器件配置字决定;功耗低,体积小,可方便集成到各种电子器件。本系统中,将每个无线发送模块nRF24L01 的 CSN、SCK、MISO、MOSI、IRQ、CE 引 脚 分 别与LPC2103及无线接收模块的C8051F020 6个I/O口相连。其中,CSN是片选端,SCK是时钟线,MISO是主机输入从机输出端,MOSI是主机输出从机输入端,IRQ是中断请求输出端,CE是芯片模式控制端。本设计采用增强型SchockBurst模式,该模式使双向通信执行起来更为容易、可靠。
3 系统软件设计
3.1 信号采集处理
作为视频监控处理的每一个监控模块中的LPC2103,在进行系统初始化后进入主循环等待偶场同步信号的到来。当视频的偶场到来并触发场中断后等待偶场下的行同步信号的到来、且行同步到来时,用内部A/D采集视频信号并存入数组,直到采集到所需的行数的信号后,对数据进行处理。之后等待下一个偶场的到来,进行下一场的采集处理。流程框图如图5所示。

图5 信号采集处理流程图
3.2 闯入监控处理
由于本系统只对是否有物体闯入进行识别,所以只需要对采集进来的每一帧图像进行整体的识别(即图像有无大的变化进行判别),因此,在这里只采用了简单的灰度差分法对采集的数据进行处理,然后根据处理结果判断是否报警。其算法如下:

开始时采集模块采集一幅图像进行灰度差分法进行处理得到一个值Standard,对后续的图形同样地用灰度差分法进行处理得到另一个值Fi,将两个值的差值Delta_Fi与设定阈值比较,从而确定是否输出信号报警。如果该差值Delta_Fi在阈值范围内则将Flag标志位置 0,并继续进行图像采集监控;否则将Flag标志位置1并进行报警处理,其流程图如图6所示。
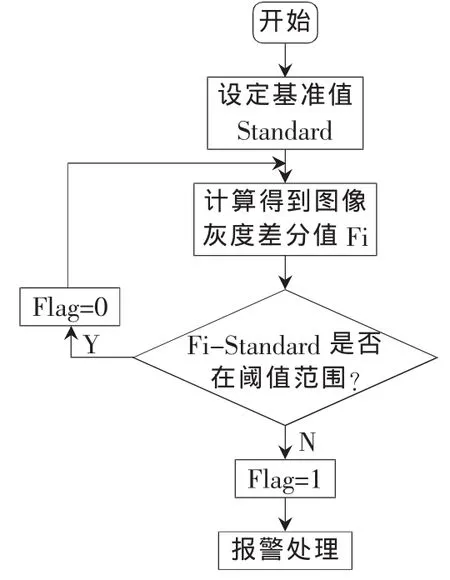
图6 闯入监控处理流程图
3.3 无线传输
在本系统中首先对每个监控模块进行编号 (1~n),即每一个监控场所有一个对应的编号(1~n),这个编号将作为每个监控模块程序中的const变量存储。当整个系统开始运行时,作为视频监控的LPC2103首先发送该模块对应的编号(1~n),然后将处理得到的 Flag标志位数据进行无线发送并进入等待接收状态,发送的数据被作为移动监控设备的无线模块接收并产生中断使与之相连的C8051F020[5]读取接收到的监控模块编号及Flag标志位数据。如果接收到的Flag标志位数据为1,则该C8051F020使用SPI与无线模块通信,将指令数据1发送给对应编号 (1~n)的监控模块进而关闭本模块对应的报警模块,进行后期处理,继续进行监控。如果接收到的Flag标志位数据为0,则通过无线发送指令数据0监控模块继续进行监控。如果具备其他条件的,还可以通过使用SCI串口通信,将发生警报的区域的监控模块的编号显示在电脑显示屏上,以便工作人员确定检查区域。流程图如图7所示。
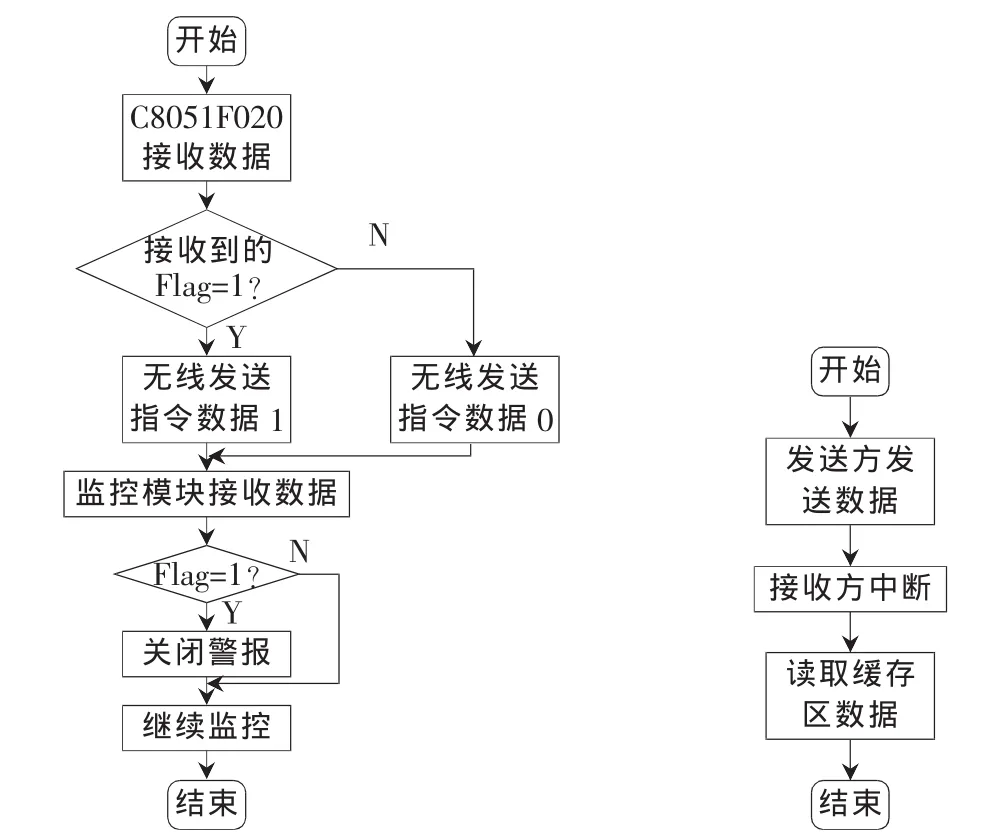
图7 无线传输流程图
本文设计的多方位闯入监控无线报警系统,每个监控模块采用了LPC2103作为主要控制模块,对LM1881分离出来的视频信号进行相应处理,由与其相连的无线传输模块将数据传输给移动监控设备。若有异常,蜂鸣器报警,移动监控设备C8051F020作出相应应答指令,并针对这一情况进行处理。在实际生活中,该系统可移植性好,使用简单,准确定位警报地点,真正能做到实时监控实时处理。
[1]张海山,李伟.视频采集与处理方法[J].河北理工大学学报,2007,29(1):75-77.
[2]朱广.基于视频分离芯片LM1881的图像采集系统设计[J].机械工程师,2009(12):81-83.
[3]周立功.ARM嵌人式系统基础教程(第2版)[M].北京:北京航空航天大学出版社,2008.
[4]李辉,宋诗,周建江.基于 ARM和 nRF24L01的无线数据传输系统[J].国外电子元器件,2008(12):44-46.
[5]马忠梅,籍顺心,张凯.单片机的 C语言应用程序设计(第 4版)[M].北京:北京航空航天大学出版社,2007.
猜你喜欢
无线互联科技(2021年4期)2021-04-21 10:12:36
小猕猴智力画刊(2019年3期)2019-04-19 00:01:52
电子制作(2018年23期)2018-12-26 01:01:08
家庭影院技术(2018年6期)2018-07-17 06:10:06
电脑知识与技术(2017年27期)2017-11-20 12:10:09
电子制作(2016年15期)2017-01-15 13:39:03
发明与创新(2016年23期)2016-10-13 02:16:14
湖北工业大学学报(2016年5期)2016-02-27 13:14:51
河南科技(2014年10期)2014-02-27 14:09:18
卫星电视与宽带多媒体(2013年17期)2013-10-21 01:40:28