
基于PixelGrid的无人机影像空三精度分析
2012-04-29 02:38:49刘强石洁赵琛
电脑知识与技术 2012年12期
关键词:精度
刘强 石洁 赵琛
摘要:随着遥感新技术的发展,正射影像的快速获取和更新是我们在应急处理中面临的新挑战,在对无人机影像基于PixelGrid软件进行了空三加密的试验,采用了两套控制点布设方案,并对结果进行了精度分析,论证了快速制作大比例尺正射影像的可行性。
关键词:PixelGrid;无人机影像;精度;大比例尺
中图分类号:TP18文献标识码:A文章编号:1009-3044(2012)11-2865-03
Aerotriangulation Accuracy Analysis of the UAV Image Based on PixelGrid Software
LIU Qiang, SHI Jie, ZHAO Chen
(Xinjiang Second Institute of Surveying and mapping, Urumqi 830002,China)
Abstract: With the development of remote sensing technology,we are facing new challenges in instant receiving and updating Digital Or thophoto Map. During the experiment of Aerotriangulation accuracy analysis of the UAV image based on PixelGrid, we demonstrate the feasibility of instant creating large scale of orthophoto by using two different reference points and analyzing the results.
Key words: PixelGrid; UAV image; precision; large scale
随着遥感新技术的发展,以及数字城市建设,灾害应急处理,重大工程建设,新农村测绘保障等工作的需求,DOM的快速生成成为我们需要解决的问题。该文主要从不同空三布点方案对精度影响,来探讨无人机影像的空三的可行性。
1数据资料
试验区影像为无人机航空彩色数码影像,共包括3条航线,37张航片,影像航向重叠度大约为75%,旁向重叠度大约为50%。航摄焦距为24.28mm,影像分辨率6.4mm,影像行数5616像素,影像列数3744像素。像主点坐标x0,y0为0,0。
2控制方案及空三成果
2.1试验区内收集了12个外业控制点,依据控制点选取几种布点方案进行试验,以确定加密和测图时满足低空数字航空摄影测量内业规范要求
其点位分布如图2,图3所示。试验区内没有采用每幅影像的POS数据。试验区使用PixelGrid(UAV)软件进行全自动连接点量测,同时添加控制点及检查点进行空三加密。
2.2空三加密流程
具体加密流程如图1所示。
2.3空三结果及精度检查
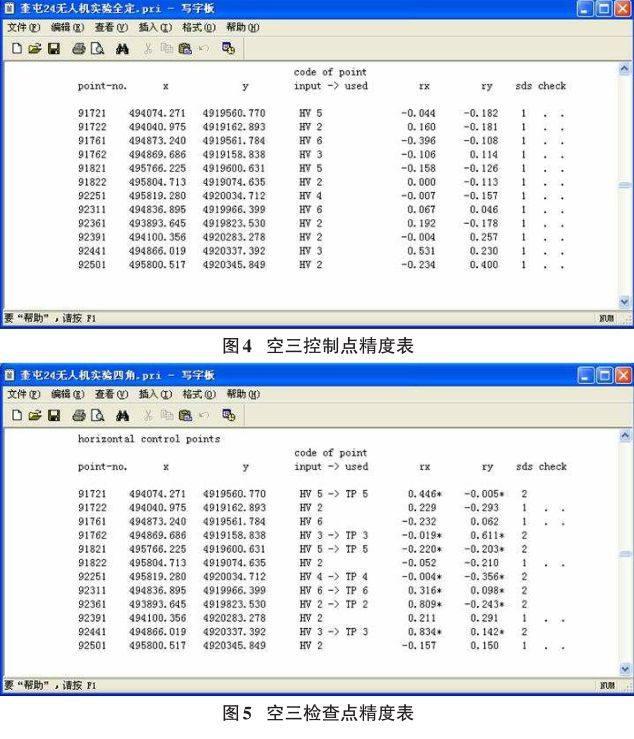
2.3.1全部控制点定向,平差后控制点误差的最大值、均值、中误差如表1所示,具体每个控制点的精度信息见图4。


从表1看出,控制点的平面及高程精度满足低空数字航空摄影测量内业规范内业平地规范要求。现行1:1000规范规定:
数码航片生成的立体模型影像清晰,可满足1:1000成图要求,符合规范限差要求。
2.3.2四角控制点定向,平差后检查点误差的最大值、均值、中误差如表3所示具体每个检查点的精度信息见图5。
表2空三检查点精度汇总表

图3检查点点位分布图(绿色点位是检查点)
从表3看出,检查点的平面及高程精度满足低空数字航空摄影测量内业规范内业平地规范要求。现行1:2000规范规定:

数码航片生成的立体模型影像清晰,可满足1:2000成图要求,符合规范限差要求。
3结束语
PixelGrid软件完成从航空影像数据的空三加密到DOM制作的过程,其空三精度满足国家低空数字航空摄影测量内业规范要求。PixelGrid软件加密不仅支持传统的加密方式,同时也支持GPS/IMU辅助空三方式,减少了外业控制点及航带连接等作业流程,提高了作业效率。采用区域四角布点方案控制,则可满足1:2000成图要求,符合规范限差要求。
参考文献:
[1]李德仁,周月琴,金为铣.摄影测量与遥感概论[M].北京:测绘出版社,2001:35-60.
[2]王之卓,摄影测量原理[M].北京:测绘出版社,1984:1-186.
[3]魏克让,江聪世.空间数据的误差处理[M].北京:科学技术出版社,2003:1-24.
猜你喜欢
一重技术(2021年5期)2022-01-18 05:42:12
中学生数理化·八年级物理人教版(2019年9期)2019-11-25 07:33:06
中学生数理化·八年级物理人教版(2019年12期)2019-05-21 07:26:38
电子制作(2018年11期)2018-08-04 03:25:38
水利规划与设计(2018年1期)2018-01-31 01:54:00
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01 04:06:44
测绘科学与工程(2016年5期)2016-04-17 06:51:15
制造技术与机床(2015年10期)2015-04-09 07:05:46
深圳大学学报(理工版)(2015年5期)2015-02-28 16:21:54
电子设计工程(2015年3期)2015-02-27 12:03:45
