
直升机静电场研究
2012-02-22 08:09郝晓辉虞健飞崔占忠
兵工学报 2012年5期
郝晓辉,虞健飞,崔占忠
(1.北京航空工程技术研究中心,北京100076;2.北京理工大学 机电学院,北京100081)
0 引言
在现代战争中,武装直升机发挥着越来越大的作用。低空慢速、悬停等飞行特性及复杂的地面环境的影响,使得利用雷达、红外、声等探测体制对武装直升机的探测提出了新的挑战[1]。静电探测器可以通过检测目标的静电场而获得目标信息。静电探测器可抗雷达隐身和现有多种形式的电子干扰,且自然干扰对它的影响不明显,这对探测直升机等低飞目标非常有效。利用静电信息对直升机目标进行探测,直升机电荷及其周围电场的分布规律是首先必须解决的问题。美国军事研究室研究了直升机表面电荷分布情况,研究认为直升机的带电有近1/2 都集中在旋翼上[2],并将直升机的整体荷电效应等效为一振动的电偶极子讨论直升机电场。该方法无法研究直升机运动时周围电场的分布情况。文献[3]将直升机假设为点目标,并将直升机等效为RC模型,研究充放电对直升机带电的影响,但没有对直升机的电荷分布及变化规律进行研究。文献[4]用线电荷来模拟旋翼的带电情况,把直升机机体简化为点电荷,根据静电叠加原理,得到了直升机外某点处的电位,没有考虑旋翼旋转对直升机静电特性的影响,没有对直升机周围的静电场分布特性做研究。旋翼旋转是直升机相对于固定翼飞行器的最大特点。而且旋翼上的电荷又较集中地分布在旋翼的顶端[5],这会对直升机的电场分布及变化规律产生影响。旋翼旋转会使直升机周围的电场产生周期性的变化,信号的频率特性与旋翼的旋转频率有关。直升机旋翼旋转对电场的调制作用,有利于增大探测器的感应信号,增加探测距离,并可以利用其性质进行直升机目标识别。
1 直升机旋翼荷电模型的近似分析
任意形状的孤立带电导体,若带有电荷Q,静电平衡时有:导体内电场强度E =0;导体外电场强度E 与导体表面处处垂直,其大小为E =σ/ε0,σ =Q/S为导体表面电荷密度,对于曲率半径为ρ >0 的任意形状的孤立带电导体,在曲率半径ρ 小处σ 大,在曲率半径ρ 大处σ 小,尖端处σ 最大,因而此处E也最大。直升机旋翼可以近似为矩形薄片结构,在旋翼尖端由于曲率半径ρ 较小,电荷分布密度就大,电场强度E 也较大。解析方法求解孤立带电导体电荷分布非常有限,且通常要求导体形状规则。对于一般形状导体,用解析方法求解将非常困难,因此求解一般形状导体的电荷分布及电场分布可以采用数值计算的方法。研究中运用有限元电磁分析软件,以某型直升机旋翼(4 旋翼)为研究对象,建立1/72 的旋翼缩比模型,对其电荷分布及电场强度进行仿真计算。旋翼表面电荷分布进行仿真计算,结果如图1所示。

图1 旋翼表面电荷分布Fig.1 Charge distribution on the surface of helicopter rotor
图1中旋翼上颜色较深的部分电荷密度较大,颜色较浅的部分电荷密度较小。由仿真结果可看出,由于旋翼两端曲率半径小,其电荷分布密度大。而在旋翼中部电荷分布较少,旋翼顶端向内电场强度逐渐减小,有限元仿真的结果与理论分析的结果是相吻合的。
2 直升机荷电模型
第1 节研究了直升机旋翼的电荷及其电场强度分布规律。以第1 节研究结果为基础,以点电荷系作为旋翼的近似模型。每片旋翼由5 个点电荷组成,等距分布于旋翼轴线上,机毂部分由1 个点电荷表示,并将各点电荷进行编号,如图2所示。
图2 旋翼荷电模型Fig.2 Charge model of helicopter rotor
假设旋翼总带电量为Qtot,各点电荷带电量不同。由于旋翼的对称性,每个翼片上各相同位置上点电荷的具有相同的电荷分配系数,点电荷的电荷分配系数如表1所示,电荷分配系数的值,由图1的计算结果决定。
以图2所示的近似模型建立旋翼旋转的运动坐标系如图3所示。
表1 各点电荷电荷分配系数Tab.1 Distribution coefficients of charges
图3 旋翼荷电模型运动坐标系Fig.3 Coordinator frame of charge model of helicopter
图3中,探测器在坐标原点;旋翼模型旋转角速度为ω;在旋转的同时,旋翼以速度v 沿X 轴做匀速直线运动;旋翼中心即距XY 平面的高度为H,中心在XY 平面的投影O'距X 轴和Y 轴分别为y 和x;单片旋翼的长度为l,点电荷Q11所在点E,与坐标原点O 距离为D,其在XY 平面的投影E'距X 轴和Y 轴分别为y'和x';OE 与Z 轴的夹角为φ,OE'与X 轴的夹角为θ.
旋翼绕旋翼中心旋转,并同时以v 沿X 轴做匀速直线运动。在此运动过程中,点电荷系有两种运动状态:1)代表机毂的点电荷Q5只做匀速直线运动;2)旋翼上各点绕Q5以角速度ω 旋转,并同时以v 沿X 轴做匀速直线运动。旋翼运动在坐标原点O的电场强度是各点电荷场强的矢量和。旋翼上各旋转点电荷运动方式相近,各点存在旋转相位、相对距离的差异。以点电荷Q11为例,其在O 处的电场强度
式中:k1为电荷分配系数;Qtot为旋翼总带电量;ε0为电介质常数;D 为Q11与O 点连线的矢量。

其矢量表达式为:

Q21比Q11旋转早π/2,Q31比Q11旋转早π ,Q41比Q11旋转早3π/2.因此,可求得E21、E31、E41.
其他各点电荷在O 点的场强Eij,i =1,2,3,4,j=1,2,3,4,5 均可求得,其中l 的值及电荷分配系数会发生变化。
Q5点电荷本身不旋转,只以v 沿X 轴做匀速直线运动,则:
因此,直升机旋翼总的电场强度为

假设直升机机身为一点电荷,其产生的电场强度为Eb,则直升机的总的电场强度为:

式中,旋翼和机身的电荷各占飞机带电总量的50%.
3 仿真及结果分析
假设,目标总带电量Qg=10-6C,直升机的运动速度v=50 m/s 或v =0 m/s(悬停),运动轨迹与X轴平行,距X 轴的距离y = 10 m,旋翼转速ω =4 r/s,直升机运动的起始位置在x =50 m 处,直升机的旋翼长l=10 m,直升机旋翼中心距地面高度为H=40 m,机身中心距地面H' =38 m,以下仿真得到的结果均是坐标系原点处模型各参量的仿真值。由于篇幅所限,研究中仅对Z 轴的电场强度及感应电流进行仿真分析。
3.1 Z 轴方向上的电场强度
如图4所示分别为Z 轴方向上,直升机悬停和直升机运动时的电场仿真计算结果。
图4 直升机Z 轴电场Fig.4 Electric field of helicopter along Z-axis
由计算结果可知,在Z 轴方向上各条件下的仿真计算结果与Y 轴方向上的仿真结果相似,相对Y轴方向上的计算结果,悬翼旋转对电场的影响更大,对信号的频谱分析表明,从信号的能量上看,由运动速度引起的相对低频的信号占信号能量的比例较小,而由旋翼旋转引起的信号能量相对较大。
由以上对直升机Z 轴方向、各条件下的电场的仿真计算表明,直升机的电场特性明显区别于固定翼飞行器。直升机旋翼的旋转对目标电场产生了显著的调制作用,在各个方向上的感应信号都带有旋翼旋转的相关信息,使信号包含了更多的目标特性。通过信号分析可得到旋翼旋转频率、旋翼个数、飞行速度等信息,这对目标识别、精确起爆控制提供了依据。
3.2 探测器垂直于Z 轴电场时的感应电流
探测电极垂直于电场Z 轴方向时,探测器在直升机悬停和运动时的感应电流如图5所示。
图5 探测器垂直于Z 轴电场时的感应电流Fig.5 Induced current generated when electrode is perpendicular to the electric field along Z-axis
直升机电场在Z 轴方向上的感应电流的变化规律,与X、Y 轴方向的感应电流基本相似,主要的特征都是直升机旋翼旋转对感应电流的影响,使信号中明显含有旋翼的旋转信息。
4 实验及结果分析
由以上的理论仿真可知,直升机电场由于受到旋翼旋转调制的作用,其电场的变化规律明显有别于固定翼飞行器。无论是直升机做悬停或匀速飞行,其周围电场信号中都加入了旋翼的旋转信息。为了验证理论计算的正确性,研究中对直升机的外部电场进行了实验测试。在实验中,使用电场传感器、被动式静电探测器对直升机电场进行探测,探测获得的信号数据由数据采集系统采集获得。
直升机飞行轨迹距探测器垂直距离约20 m,飞行高度约20 m,飞行速度约为50 m/s.
4.1 直升机电场信号的探测
由于传感器布设位于直升机的飞行轨迹正下方,造成X 轴、Y 轴电场信号的相互抵消,实验中测得Z 轴方向的电场强度较为明显。电场传感器测得的直升机Z 轴电场如图6所示。
图6 实验测得的直升机Z 轴电场强度Fig.6 Experiment results of electric field intensity generated by helicopter along Z-axis
图6测得的电场信号为直升机飞过电场传感器时的感应信号;由测得的电场强度信号可看出,直升机在传感器Z 电场强度的变化趋势与仿真的结果基本一致,信号呈现先单调递增,后又单调递减的变化趋势。而且可以看出在感应信号中,有交流变化的成分。传感器测得的信号最大幅值,即电场强度的最大值约为40~50 V/m,反推直升机的带电量约为10-6C,这与图4所示直升机Z 轴电场的数值仿真的结果也是基本一致的。
4.2 静电探测器对直升机的感应电流
实验中采用电流式静电探测器对直升机的电场进行探测,并得到了感应电流信号,结果如图7所示。
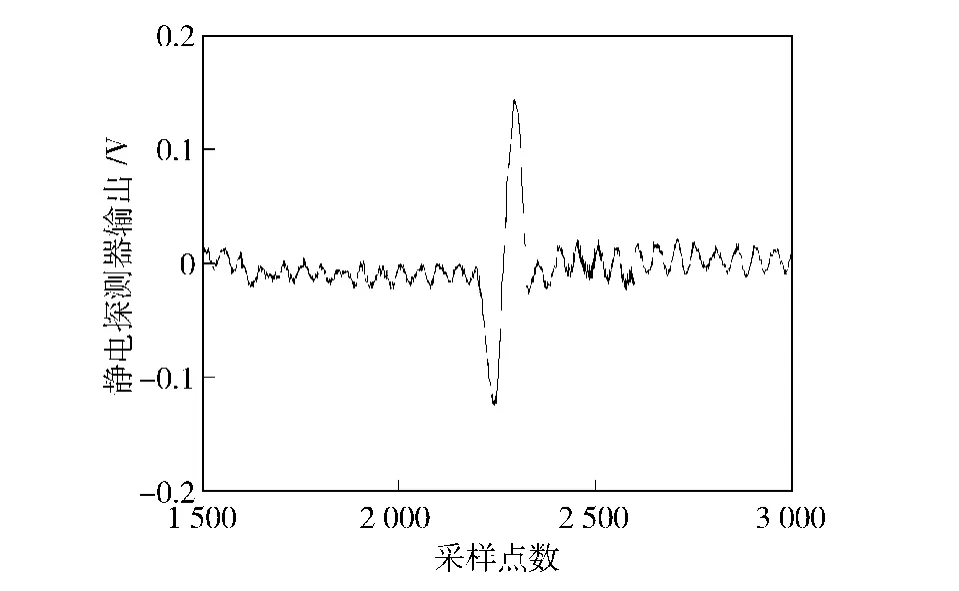
图7 静电探测器的感应电流Fig.7 Induced current on electrostatic electrode
图7的探测结果、信号的变化规律与图5的仿真计算结果是基本相同的。由于直升机带电或飞行方向的问题,使信号的极性相反,另由于探测器灵敏度和探测距离不同的影响,使实验测得的信号中,旋翼旋转对信号的影响较低,但在信号中仍可看出旋翼旋转对信号的影响。由探测器的感应信号可知,直升机目标此时带正电,试验条件为冬季、晴天、干燥环境,与理论上直升机的带电极性是相吻合的。
由外场实验的结果可看出,无论是电场强度还是感应电流,外场实测得到的结果与直升机荷电模型仿真结果是基本相符的。运用运动直升机荷电模型可对直升机目标的静电特性进行研究是可行的。
5 结论
运用建立的直升机荷电模型分析得到了直升机周围的电场分布规律。实验结果表明,直升机旋翼荷电模型建立方法是可行的,仿真计算的各参数变化规律和数量值都与实验结果基本相符。研究表明,直升机的电场特性明显区别于固定翼飞行器(固定翼飞行器电场特性参见文献[6])。直升机旋翼的旋转对目标电场及探测器的感应电流产生了显著的调制作用,感应信号带有旋翼旋转的相关信息,使信号包含了更多的目标特性。采用适当的信号处理方法,可从信号中提取出旋翼旋转频率、旋翼个数、飞行速度等信息,为直升机的目标识别及引信的炸点控制提供较精确的信息。
References)
[1] 杜兰,保铮,邢孟道.直升机雷达回波的分析与检测[J].西安电子科技大学学报,2003,30(5):574-579.DU Lan,BAO Zheng,XING Meng-dao.Analysis and detection of radar echoes from helicopters[J].Journal of Xi’dian University,2003,30(5):574-579.(in Chinese)
[2] Hill D M.Time-varying electrostatic modeling techniques,ADA358654[R].US:Army Research Lab Adelphi MD,1999:1-5.
[3] 李延旭.喷流对航空器荷电影响的理论研究[D].北京:北京理工大学,2005.LI Yan-xu.Theoretical research on the influence of plume flow on aerostat’s charging[D].Beijing:Beijing Institute of Technology,2005.(in Chinese)
[4] 毕军建.对空弹药引信用静电矢量探测技术研究[D].北京:北京理工大学,2003.BI Jun-jian.Research on the technology of electrostatic vector detection for antiaircraft ammunition fuze[D].Beijing:Beijing Institute of Technology,2003.(in Chinese)
[5] HAO Xiao-hui,XU Li-xin,CUI Zhan-zhong.Research on nearfield detection of the electric field of rotorcraft[C]∥The 7th International Symposium on Test and Measurement,Dalian:ISTM,2007,2:1481-1484.
[6] 李银林.被动式静电引信探测技术[D].北京:北京理工大学,2000.LI Yin-lin.Passive electrostatic fuze detection technology and information processing[D].Beijing:Beijing Institute of Technology,2000.(in Chinese)
猜你喜欢
数理化解题研究·高中版(2022年4期)2022-04-28
中学生数理化·中考版(2021年10期)2021-11-22
空间科学学报(2021年4期)2021-08-30
中学生数理化(高中版.高考理化)(2020年10期)2020-10-27
中学生数理化·高二版(2020年1期)2020-02-25
中学生数理化(高中版.高二数学)(2020年1期)2020-02-20
学校教育研究(2018年9期)2018-05-14
新高考·高一物理(2015年6期)2015-09-28
新高考·高一物理(2015年6期)2015-09-28
中学教学参考·理科版(2014年11期)2014-11-21
