
智能视频监控关键技术分析
2012-01-25 07:52:30肖沁雨
制造业自动化 2012年12期
肖沁雨
(北京邮电大学,北京 100876)
0 引言
在计算机强大的数据处理功能帮助下,智能视频监控系统(IVS)能高速分析计算视频图像中的海量数据,并对于其中关键信息进行自动的分析和提取工作,这样就可以对于不同目标对象进行识别,把用户不关心的数据过滤掉。同时在自动识别不同目标对象时候,还能够发现系统中的异常情况,辅以适当的分析和描述,进行最快方式的报警处理,这样还能有效帮助相关人员进行危机处理。所以有人曾这样形象的描述智能视频监控系统:“智能视频监控系统就是对传统的只有眼睛的视频监控系统装上大脑,使其具有更为强大的自动分析判断的能力,从而实现其真正的智能化的功能和作用”[1,2]。本文主要针对智能视频监控技术中的运动目标的跟踪,还有运动目标的检测相关技术进行重点分析。
1 运动目标检测和提取
将运动目标从视频序列背景中提取出来就是运动目标检测的最为主要目的,其作为智能视频监控中处理的首先工作来说,其基础作用十分重要,结果直接影响到智能视频监控技术的相关后续处理工作[3]。
1.1 背景差分法
对于背景差分法来说,运动目标的获得则是通过视频图像与背景图像相比较。尽管该方法思路比较简单,但是纯背景在现实生活中的所获得的视频帧序列往往难以得到。这样,背景从原始的视频帧序列中获取,即在运动目标检测之前进行背景建模就十分重要。对于背景差分法来说,尽管思想比较简单,但是背景模型的建立则是一个难点。运动目标能被完整的分割开来,但是当存在遮挡和阴影等复杂背景的情况或者动态背景的时候,这样实时性方法比较差。所以说,这方法针对面积不大的目标,主要在静态或准静态背景下比较适用。
1.2 相邻帧间差分法
所谓的相邻帧间差分法,就是视频图像序列差分法,相邻的两、三帧图像亮度差能够使得视频图像序列中的运动目标特性表现出来,这样就可以对于运动目标进行确定。该方法思想也非常简单,实现起来较为容易。对于动态变化场景来说,实时性一般较好,但有时对于运动目标的所有像素的提取来说,可能存在一定的困难,这样情况在背景颜色与运动目标颜色相差不大时,尤为明显,因为很有可能出现阴影干扰,以及相关的“漏检”现场,误将背景检测作为运动目标的部分。这种方法主要是按照静态背景条件下,目标运动稍快较为适用,同时要求不高的图像分割精度。
1.3 光流法
光流(Optical Flow)计算技术就是,当运动目标在场景中运动时,其在视频图像中对应的像素点的亮度也在运动,而这种视频图像中各个像素点所表现出来的亮度模式的运动就被称之为光流。可见光流既表现出了视频图像中的亮度变化,同时也包含了运动目标的运动信息,因此根据光流法所表达出的图像的这些变化信息,我们可充分的利用其作为运动目标的运动检测。根据光流的定义,可以进一步的引入光流场的定义,根据所赋予的每个像素点的瞬时速度矢量,使得运动目标在运动过程中形成了一个二维的瞬时速度场,这个瞬时速度场,即就是运动场景中视频图像各个像素点所形成的三维速度矢量的平面投影。因此在运动的某一瞬间,我们可以得到视频图像中各个像素点与三维空间物体中各点的一一对应关系,由此可见,光流也包含了运动场景中三维空间物体的丰富信息。下面动态分析视频图像,按照各个像素点在视频图像中的光流矢量特征。当运动目标不存在视频图像中,在整个视频图像区域中,光流矢量是连续变化的;而当运动目标存在于视频图像中时,对于运动目标和背景图像来说,相对运动情况往往存在,这就是造成邻域背景与动目标所形成的速度矢量不同原因,也就从而能够有效检测运动目标及其位置。
针对光流法特点,场景中的任何信息不需要提前知道,也能检测出独立运动目标。对于动态背景较为适用,一方面图像的三维结构丰富的信息能够携带,另外一方面还具有运动目标的运动信息。但是计算量大、容易受到噪声影响则是光流法的缺点。当实施实时检测时候,还必须应该借助硬件才能实现,因而在应用在运动目标检测精度要求比较高的情况下。
2 运动目标描述
对于跟踪过程中的运动目标、还有视频图像序列中检测到的运动目标进行相关分析研究,需要利用一种方法在尽量减少冗余信息的前提下,进行表示的工作就是目标描述。运动目标跟踪的算法分类与其紧密相关,这是因为图形描述法不同,往往影响目标跟踪算法的不同,外轮廓描述法,矩形框描述法,点描述法,区域描述法还有基于图像的描述法是集中常见的描述方法。
3 运动目标跟踪
可以通过不同的特征值,同一运动目标的不同视频帧的视频图像序列可以相互关联起来,运动轨迹得以计算出来。所以可以看出,同种或者某种特征相似的元素集合可以在视频序列图像中找到,这就完成了目标跟踪,同时,特征模板的提取则极大影响到了匹配算法的准确性。图1为目标跟踪坐标示意图,我们看一下利用直观的图形方法定义运动目标的跟踪问题。
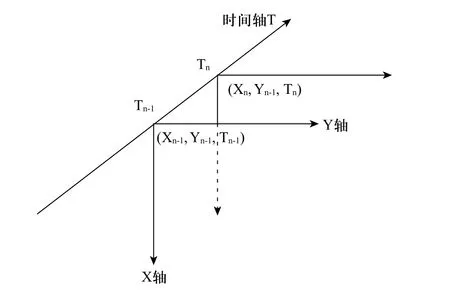
图 1 目标跟踪坐标示意图
在图1中,二维图像从位置1(Xn-1,Yn-1,Tn-1)移动到位置2(Xn,Yn,Tn),定义位移矢量为(ΔXn,ΔYn)。则对于相邻两帧视频图像来说,物体表面上的各点相应的位移称为视差。所以,运动目标的跟踪就可以看作是目标的视差,并通过建立与运动目标一一对应关系在连续的视频序列中。
跟踪过程的两个重要指标是可靠性和精确度。对于不同的运动状态,不同的跟踪算法针对运动目标跟踪被采用。比如,动机性不强的较小面积的跟踪目标来说,一般为了提高精度而采用滤波跟踪方法;而具有一定面积的跟踪目标,且距离较近时,具有较大的抖动时,为了保证跟踪目标的稳定性和精确性,一般采用匹配跟踪方法和窗口质心跟踪运动目标的特征信息来进行跟踪,考虑运动目标跟踪算法时,则不用考虑运动目标的整体特性。在相应的特征集合被搜索到,运动目标跟踪成功,不仅大大减少了运算量,同时还具有较强的抗干扰能力,这是因为不变形和抗干扰性则为选取的特征,这也是大部分基于特征的目标跟踪算法的特点。其中,基于纹理特征的跟踪,基于运动特征的跟踪,基于颜色特征的跟踪和基于形状特征的跟踪等是常见的集中基于特征方法,但是在实际的算法中,为了达到更好的效果,往往是几种方法的综合使用。
可以看出,运动目标的跟踪问题可以按照以下三个步骤进行:第一,特征选取,显著特征从图像中进行选取;第二,特征集合的对应关系在视频序列中找到,完成特征匹配,还要对其进行相关一定分析处理;第三,计算相关的运动信息。
4 运动目标识别
从视频图像序列中按照一定的技术方法,对于输入的图像序列进行处理,然后进行提取和识别处理,这样就完成了运动目标识别工作。一般来所,运动目标识别分为有形运动目标识别和空间点的运动目标识别,他们的区分依据就是相机中成像的大小在识别目标由远及近移动过程中的变化。
基于一致样本的前提下进行的判决,首先需要得到感兴趣目标和背景的部分样本,建立相应的识别模型。目前,关于目标识别领域中出现的各种的目标识别算法,这些算法各具特点,一般包括基于知识的自动目标识别方法、经典的统计模式识别方法、基于多传感器信息融合技术的自动目标识别方法、基于模型的自动目标识别方法以及基于统计学习的自动目标识别方法等等。
运动目标识别与跟踪系统只需要对于目标的类型进行判断,而不需要了解图像中更多的细节问题,所以这里统计识别方法一般就是指提到的基于目标跟踪的识别方法。
5 运动目标行为分析
强调智能视频监控中智能化,主要体现在运动目标行为分析作用更加突出,一方面运动目标检测提取和跟踪相关诸多大量数据运算可以实现,另外一方面,体现出监控系统的人性思考特点,可以经过自主的,不加外人干涉而自动对于运动目标进行分析并处理,这样就能有体现整个监控系统的智能化特点。
比如,在了解人的行为包括跳、走、跑、躺、跳等等行为后,车的行为主要包括碰撞和车辆加速等等,这样针对某视频序列中的运动目标为人和车进行运动目标识别可以分析得到上述结论。其中,智能化能够认为是为监控系统的告警提供有效的数据基础,运动目标识别的基础上进行运动目标的行为分析。
目前,主要是在特定场景下的运动目标行为分析工作,一般来说,已知场景中发生的所有行为,或者已知所有相关的行为模式,并且这种行为模式的训练往往需要大量的样本。但是在实际情况下,往往要事先获得监控场景中的所有目标行为模型和大量训练样本具有很大难度,所以说,一种自适应的行为分析模型的学习方法就显得格外重要。
6 结束语
本文针对智能视频监控系统中关键技术进行分析,主要包括运动目标的描述、运动目标的跟踪、运动目标的检测、运动目标的识别以及运动目标的行为分析,分析而来整个智能化监控系统的特点,一定程度上分析了目标检测与目标跟踪的常用方法和算法,对于今后开展智能视频监控发展具有一定帮助。
[1]韩晓冰,王玮明.基于软交换的井下视频监控系统[J].制造业自动化,2011,33(2).
[2]王鹏,朱秀昌.智能视频监控中滞留物与人的关联分析算法[J].电视技术,2011,35(3).
[3]李鹏飞,陈朝武,李晓峰.智能视频算法评估综述[J].计算机辅助设计与图形学学报,2010,22(2).
猜你喜欢
汽车工程师(2021年12期)2022-01-17 02:29:54
疯狂英语·新读写(2021年10期)2021-12-07 02:41:30
当代陕西(2020年14期)2021-01-08 09:30:42
疯狂英语·新策略(2019年10期)2019-12-13 08:43:28
新世纪智能(英语备考)(2019年4期)2019-06-26 00:49:04
当代陕西(2019年10期)2019-06-03 10:12:04
铁道通信信号(2019年11期)2019-05-21 03:06:06
中国公共安全(2017年8期)2017-10-13 08:12:17
数学小灵通·3-4年级(2017年9期)2017-10-13 08:10:54
贵州师范学院学报(2016年4期)2016-12-01 03:54:07
