
一种实时以太网EtherCAT介绍
2012-01-13 02:34
电子世界 2012年22期
1.引言
为满足控制系统数据量剧增和企业“一网到底”的控制需求,工业以太网技术逐渐向控制底层渗透,开始广泛地应用于现场级的通信控制。已成为工控领域一个热门的研究内容,目前,应用比较广泛的几种工业以太网标准包括:Profinet、Powerlink、Modbus/TCP、EtherNet/IP、EtherCAT以及我国自主研发的EPA等。其中本文将要介绍的EtherCAT网络是一种实时工业以太网技术,最初由德国倍福公司开发,于2003年成立了ETG(EtherCAT TECHNOLOGY GROUP)负责推广这种工业以太网。2007年7月,ETG成立了中国代表处,旨在推广EtherCAT技术在中国的应用,几年之间,EtherCAT已经在多个领域取得了广泛的应用。
EtherCAT采用移位、位寻址的方式获取数据,相比传统的以太网数据包传输方式,极大的提高了传输效率,两个设备间的延迟仅为微秒级。EtherCAT网络的通信结构采用主从方式,通信方法使用集总帧,实现实时传输的方式是采用等时传输,非实时数据的传输按协议运行,以太网通信速率可达100MBit/s。EtherCAT网络具有 以下几个方面的特点:
(1)与标准以太网完全兼容的帧结构,使用标准的IEEE802.3以太网帧;
(2)直接内存存取技术使EtherCAT具有超高的性能特性;
(3)高精度时钟同步,能够使用非常精确的、微妙级别的同步误差时间基;
(4)开放性良好,EtherCAT技术标准与以太网完全兼容。
本文将从网络结构、寻址模式、通信帧格式、网络层协议等几个方面对EtherCAT网络做一个简单介绍。
2.EtherCAT网络结构
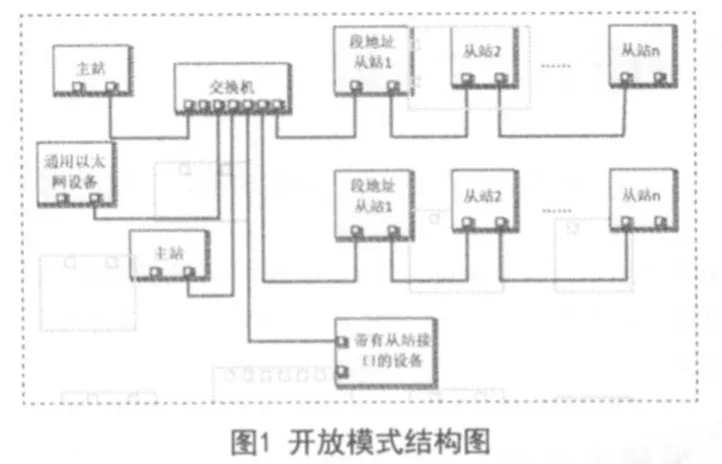
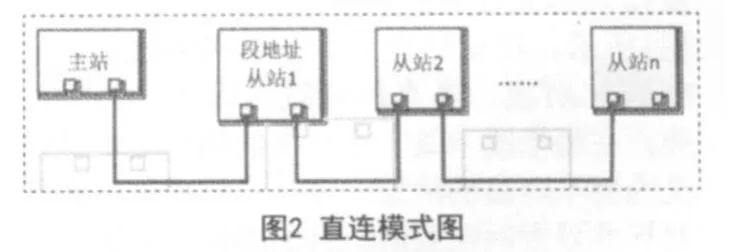
EtherCAT协议通过主站来管理连接到网络上的从站设备。主站可以是通用PC机或者是嵌入式设备,从站是带有EtherCAT网络接口的控制器设备。网络连接结构包括开发模式和直接连接两种模式,开放模式如图1所示,在这种模式下整个网络包括多个EtherCAT段,各个段通过以太网交换机相连,在每个段中第一个从站的物理地址被定义为整个网段的地址,该从站程序可以通过对标准以太网帧的源、目的地址存取操作完成地址交换。直连模式如图2所示,在这种模式下,网络只有一个EtherCAT网段构成,多个EtherCAT从站连接在具有标准以太网口的主站上,直接连接成线性结构。
3.EtherCAT寻址模式
EtherCAT协议包括物理寻址和逻辑寻址两种寻址方式。逻辑寻址方式将所有的从站设备的物理地址在4GB的逻辑地址空间统一编址,通过接口芯片中的现场存储器管理单元实现逻辑地址到物理地址的映射管理。物理寻址的物理地址是两个16位二进制的数值,被称作ADP和ADO。其中ADP用来确定站地址,ADO确定数据在从站存储器中存储的实际物理地址。对于物理寻址来说,又分为两种模式即:自动增量地址和配置站点地址。
①自动增量寻址
数据包将已编址的从站的位置地址设为负值。经过每个从站时地址都加1。读到地址等于零的从站将会在收到这个帧时执行相应的命令。
②配置站点地址
配置站点地址是在启动时由主站分配,EtherCAT从站无权更改。配置站别名地址存储在EEPROM中,EtherCAT从站可以更改。
4.EtherCAT帧结构
EtherCAT使用标准的IEEE802.3以太网帧,在主站一侧使用标准的以太网控制器,因此,EtherCAT可以和其他以太网协议平行地运行在一条线路上。标准的IEEE802.3以太网帧中数据部分为EtherCAT的数据,数据帧关系如图3所示。其中,ECAT域为EtherCAT总线类型标志位,为固定16进制值88A4H;PAD域和FCS域分别为以太网的填充位和校验位;Ethernet Header域为标准以太网帧头;EtherCAT Telegram域为EtherCAT数据报文,可以包含多个子报文;Datagrams Header域为EtherCAT子报文头;Data域为要传送的数据值;WKC域为从站计数器。由于一个EtherCAT数据帧可以包含多个子报文,所以可以将多个设备的数据装载到一个标准以太网帧上,从而达到更高的传输效率。
5.EtherCAT网络层协议
EtherCAT协议栈,针对标准以太网协议七层协议,自上至下实现了精简,完成了其中三层的功能即:物理层、数据链路层和应用层。如图4所示。
在应用层部分,根据控制应用行规,能够实现相应控制。对于实时控制的应用任务,定义了对象数据字典。在数据字典中将周期性的、实时的任务定义为PDO(过程数据对象),非实时的参数、诊断等数据定义为SDO(服务数据对象),采用邮箱机制完成此类数据的传输。它们与具体数据的映像关系在XML文件中给出,并被存储在从站的EEPROM中。通过设计FMMU(现场存储器管理单元)、SyncManger(同步管理器)等硬件单元,协议在数据链路层实现了实时处理,支持具有时限约束的实时数据通讯。该层主要负责完成实时任务的计算,比较以及产生帧校验序列码,根据预先存贮在存储器里的参数信息,通过有关的硬件电路实现数据在标准以太网帧相关位置的插入和抽取,完成数据输出和输入操作。完成存取的数据都存储在数据链路层存储器的用户区部分。而协议的物理层则采用标准的以太网硬件,实现数据帧与二进制位流数据的转换。
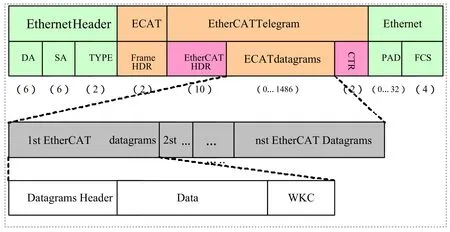
图3 EtherCAT数据帧结构
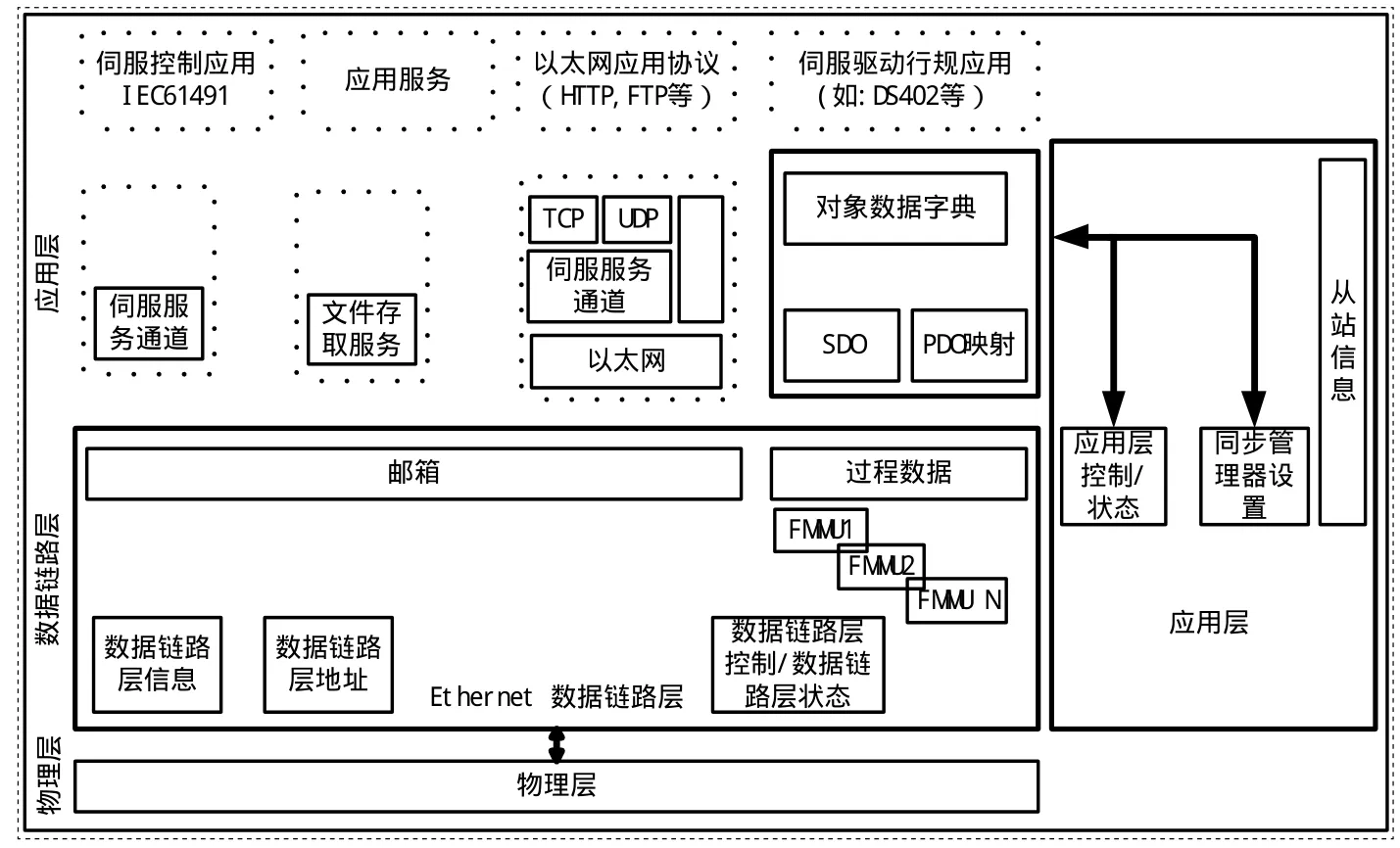
图4 EtherCAT协议栈
6.总结
本文详细介绍了EtherCAT技术的性能特点、系统组成、工作原理、EtherCAT的协议规则。目前,国际上已经有多个厂家研发出自己的主站产品和从站芯片,国内也有多个厂家开始着力于该技术的产品开发。EtherCAT作为工业以太网的一种解决方案,以其高效、简单和易于实现等优点正在获得越来越多的工控人的青睐。
[1]王维建.工业以太网EtherCAT技术的原理及其实现[J].微计算机信息,2010,26(13):51-52.
[2]黄文君,金 建祥.基于EPA工业以太网的现场控制器研制[J].仪器仪表学报,2006,27(8):949-952.
[3]向乾亮,辛志远,林继如,等.实时以太网EtherCAT技术在电力系统中的应用[J].继电器,2008,36(11):42-45.
[4]李武杰,郑晟,陈文辉.Ethernet/IP工业以太网的研究及应用[J].电子设计工程,2011,19(9):26-29.
[5]郇极,刘艳强.工业以太网现场总线EtherCAT驱动程序设计及应用[M].北京:北京航空航天大学出版社,2010.
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
装备制造技术(2020年1期)2020-12-25
组合机床与自动化加工技术(2017年1期)2017-02-15
电子制作(2017年23期)2017-02-02
电子制作(2017年24期)2017-02-02
电源技术(2015年7期)2015-08-22
中国交通信息化(2015年11期)2015-06-06
环球时报(2014-06-18)2014-06-18
电测与仪表(2014年18期)2014-04-04
电测与仪表(2014年13期)2014-04-04
