
天气雷达天线伺服控制系统中PWM保护电路的设计
2011-12-27 01:06:00乔建江
河北省科学院学报 2011年1期
乔建江
(中国电子科技集团公司第54研究所,河北石家庄 050081)
天气雷达天线伺服控制系统中PWM保护电路的设计
乔建江
(中国电子科技集团公司第54研究所,河北石家庄 050081)
介绍了天气雷达天线伺服控制系统中直流PWM泵升电压电路限制技术,泵升电压形成的原理以及泵升电压限制电路的原理,并结合工程设计中具体的直流PWM天线伺服控制系统对泵升电压限制电路的参数进行了详细的计算。较好的解决了供电电源的“泵升电压”对直流PWM伺服系统影响。实际应用表明,该天线伺服控制系统PWM保护电路设计是合理、成功的。
PWM;泵升电压;IGBT;伺服系统
在直流伺服系统设计中,现在普遍使用直流PWM功率放大器来驱动伺服电机带动天线旋转运动。因为PWM伺服系统的开关频率较高,仅靠电枢电感的滤波作用就能足以获得脉动很小的直流电流,电枢电流容易连续,系统的低速运行平稳,调速范围宽,输出电流波形较好,所以电机的损耗和发热都较小。同样由于PWM开关频率高,与快速响应的电机相配合,系统可以获得很宽的频带,大大提高伺服系统的动态抗干扰能力,能够很好满足伺服系统动态性能的指标要求。但是PWM型变换器[1]的整流环节为二极管不可控整流器,电网对调速系统的能量供给是单向的,这样可以减少调速系统对电网功率因素的影响,但是当电机在高速旋转着而突然减速时,储存在旋转电枢和负载中的一部分动能,要反馈到功率转换电路中。而所储存的能量常常超过电机减速时所需要的能量,且在这段减速期间,电动机要向功率转换电路传输能量。如果不能解决好这些能量的流向问题,整个系统无法正常工作。所以在设计的某大型天线PWM伺服驱动系统中,由于PWM驱动功率较大,供电电源的“泵升电压”对PWM伺服系统影响很大,为了伺服系统安全运行,更好地保护功率放大器本身不受损坏,根据以上特点设计了PWM功率放大器的保护电路。
1 “泵升电压”的形成原理
PWM直流伺服系统三相整流如图1所示。
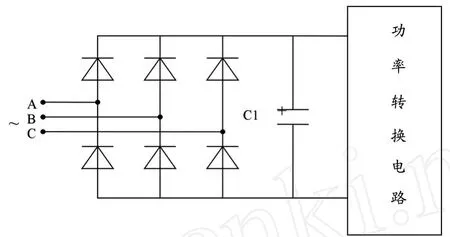
图1 PWM直流伺服系统三相整流
由图1中可以看到,因为三相整流电路中二极管的不可逆性,电动机、减速机构和天线的能量不可能回馈到电网。脉宽调速系统的电动机驱动天线高速旋转,当电动机突然减速或制动时,储存在电机旋转电枢和负载转动的一部分动能,将变成电能,并通过PWM回馈到伺服三相整流电源的直流侧,由于不可以回馈电能到电网,只好对滤波电容C1充电,让电容来储存回馈的能量,同时引起功率转换电路供电电源母线上的电压升高,即称为“泵升电压”。由于电容一般不消耗能量,假如让电容C1全部积累回馈的能量,会使直流侧电压升的很高,远远超出大功率器件和电容的耐压范围,这样势必会造成大功率器件或储能元件的损坏,而且也将需要很大的电容量,并不能适应负载惯量变化的需要,因而在设计的伺服系统中仅靠增加电容C1的值来限制泵升电压是不宜的。设计的伺服系统中正常整流后的电压是160VDC,PWM功率放大器的最高耐压值为200VDC,泵升电压可能超过40VDC,由于泵升电压范围小,故很容易造成PWM功率放大器的损坏,这是不允许的,因此须采取保护措施,让回馈的能量耗散掉,保证PWM功率放大器在使用中的安全。
2 “泵升电压”限制电路原理
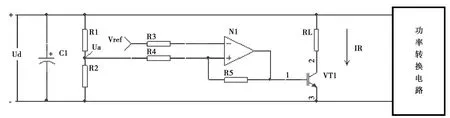
图2 典型的泵升电压限制电路(PWM保护电路)
图2是典型的泵升电压限制电路示意图,电阻R1和R2组成高阻分压器。运算放大器工作于比较器状态,参考电压V ref为门限电压,加到运放的反相端,Ua加到正相端。当电机在正常转动时,Ua小于V ref,V T1(IGB T)不导通;而当电压高到使Ua大于U ref时,比较器输出为正,V T1(IGB T)导通,电容通过RL泄流。
泵升电压保护电路是由绝缘栅晶体管V T1(IGBT)和电阻RL构成的一个能量泄放电路(如图2),其设计必须考虑到两个方面,一方面是泵升电压不能过高,必须低于电容和大功率器件的电压额定值,另一方面是泵升电压保护电路动作时不能使直流侧的电压降的过低,必须等于或高于正常工作时的直流侧电压Ud。一般情况下,当直流侧电压U d大于正常工作时的直流侧电压Ud的130%,打开IGBT,电容C1通过电阻RL泄流,使回馈能量消耗在电阻RL上,使直流侧电压Ud下降,当直流侧电压Ud降到正常工作时的直流侧电压U d的110%时关断IGBT,从而保证直流侧电压U d在正常的工作范围内。
3 “泵升电压”限制电路参数设计
结合具体应用的电路介绍如何选择计算泵升电压限制电路的参数。
3.1 电容C1的参数设计
前面已经介绍在电动机制动过程中电容是储存回馈能量,而且无论从提高效率、电源滤波,还是抑制泵升电压考虑,选择较大电容值都是有利的。但是在系统设计中,必须对反馈能量进行预测,考虑其他元件的耐压值,不能无限增大电容值,必须合理选择储能电容C1的电容值。在工程设计中储能电容的参数一般按如下规则选择,耐压值应高于正常工作状态的直流侧电压,并留一定的余量,如果直流侧电压为200V,那电容器的耐压值可选则450V;电容器兼有储能和滤波的作用,但考虑到储能的作用是主要的,一般以此计算电容值。对于某一特定的系统,电动机转动惯量、制动时间长短、电动机和变换器的等效电阻是已知的,或者可以通过计算得到。在设计的系统中的总惯量(折算到电机轴)Jges为0.14kg·m2,电机最高转速n为2kr/min,电枢电阻Ra为0.432Ω,电机转矩系数KT为0.057kg·m/A,电机反电动势系数KE为57.2V/kr·min-1,系统减速时的瞬时反馈电流大约40A,

U smax指的是电源端最高电压(包括泵升电压),实际系统中为200VDC;Us指的是电源的额定工作电压,实际系统中为160VDC;Uf指的是反馈能量引起的泵升电压,实际系统中为40VDC。由反馈能量计算公式[1]可以算出反馈能量为:

从上面可以看出假如没有泄放电路的泄流作用,储能电容的取值可以取很大值,这在实际系统工程设计中根本是不可能的,但是实际设计中有泵升电压的保护电路,回馈的机械能有部分从分流支路泄放掉,所以电容值可以选小些,综合考虑选择了10000uF、450VDC的电容。
3.2 耗散电阻RL的阻值计算
对能量耗散电阻RL的阻值的计算和选择,必须能降低最大短期平均反馈电流,使得算出系统减速时的瞬时反馈电流值(按瞬时反馈功率概念),大约40A左右,由文献[1]的公式Us不超过Usmax的,根据实验可以估算出能量耗散电阻阻值为:

实际设计系统中考虑了电源端最高电压(包括泵升电压)可能有误差,为了安全起见,选择的耗散电阻值为20Ω。
3.3 泻放电路中晶体管IGBT的选择
泵升保护管IGBT的额定值选取应该与PWM的晶体管的额定值相近,因为在晶体管开通时,要流过大部分电流。泵升保护的目的是要限制直流侧的电压升高,并使储能滤波电容C取值适当,泵升保护的思想是将电容储存的电能在电阻RL上消耗掉。在我们的伺服系统中选取了日本IN TSUBTISH I电子公司的M 100DY-12H型号的IGBT模块,该模块内部有两路独立的、功能完全一致的电路。
4 结语
(1)由于IGBT是电压型驱动开关器件,有一个电容性输入阻抗,虽然输入阻抗很大,但是IGBT对栅极电荷聚集非常敏感,所以驱动电路必须很可靠,以保证一条低阻抗值的放电回路,即驱动回路与IGBT的连线要尽量短。
(2)栅极的驱动电压必须综合考虑,在短路应用的过程中IGBT的栅极开通驱动电压应该选小一些,一般情况下应该取12~15V,关断驱动电压应该中容量的IGBT选择5~6V的反向电压,对大容量的IGBT选择应该加大到10V左右。
(3)栅极驱动电路应该尽可能简单,具有对IGBT的自保护功能。
我们设计的保护电路已经成功运用于新一代多普勒天气雷达PWM直流伺服系统,该天气雷达伺服系统现在已经批量生产,实际运行稳定可靠。
[1] 秦继荣.现代直流伺服系统设计[M].机械工业出版社,1996.
[2] 黄俊等.电力电子变流技术[M].机械工业出版社,1993.
[3] 刘宏等.可逆调速系统制动过程分析及泵升保护电路的参数计算[J].电气自动化,1995,(1).
[4] 成兰等.交流调速系统制动过程分析及泵升电压处理[J].殷都学刊(自然科学版),1998,(6).
The design of PWM protective circuit in weather radar antenna servo control system
QIAO Jian-jiang
(The54th Research Institude of CETC,Shijiazhuang Hebei,050081,China)
In this paper,the technology of restrained pump voltage is p resented.The basic p rincip les for pump voltage and p rotective circuit are referred.The actual circuit parameters are calculated in detail in reference to p ractical direct current PWM Antenna servo control system.And the influence for DC PWM servo system w hich caused by“Pump Voltage”from the power supp ly is eliminated p roperly.The p ractical app lications p roved that this design is also reasonable and successful.
PWM;Pump Voltage;IGBT;Servo system
TN820.3
:A
1001-9383(2011)01-0035-04
2010-11-24
乔建江(1974-),男,硕士,工程师,主要从事天线伺服控制系统的设计和研制.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
测控技术(2021年10期)2021-12-21 07:10:20
测控技术(2018年12期)2018-11-25 09:37:44
通信电源技术(2018年3期)2018-06-26 06:33:32
北京航空航天大学学报(2016年4期)2016-02-27 06:32:11
电源技术(2015年1期)2015-08-22 11:16:20
电源技术(2015年11期)2015-08-22 08:50:36
电源技术(2015年7期)2015-08-22 08:48:50
电测与仪表(2015年10期)2015-04-09 11:48:02
弹箭与制导学报(2015年1期)2015-03-11 15:32:18
