一种基于DSP数字化控制送丝系统
2011-11-14 07:53姚河清
电焊机 2011年5期
姚河清,徐 勇,傅 强
(河海大学,江苏 常州 213022)
焊接设备
一种基于DSP数字化控制送丝系统
姚河清,徐 勇,傅 强
(河海大学,江苏 常州 213022)
设计了一种基于DSP的数字化控制PWM调速送丝系统,以稳定送丝速度为控制目标,采用电枢无电流段电枢电势同步采样方法,排除了负载电流对送丝速度的影响;采用数字PI调节,调节PWM占空比,控制电枢电势恒定,达到稳定送丝速度的目的,改善送丝性能。实验表明,电网电压波动以及送丝软管从平直状态到软管中部弯绕φ 400 mm一圈情况下,送丝速度变化率满足标准要求。
送丝系统;电枢电势;负载电流;DSP;速度变化率
0 前言
在熔化极气体保护焊中,通常采用等速送丝配合恒电压外特性电源。现代焊接设备为实现对熔滴过渡、焊缝成形、焊接引弧等有效控制,除要求稳定的送丝速度外,还要求具有不同的送丝方式,如脉动送丝、推拉送丝、变速送丝等。传统的送丝系统很难做到多种送丝方式的转换与配合,维持多种送丝方式的稳定送丝速度。设计了一种基于DSP的数字化控制送丝系统,利用数字化控制方法对电枢上无电流段的、与转速成正比的电枢电势同步采样,并进行反馈控制,排除了负载电流对送丝速度的影响,等效于转速负反馈。
1 送丝主电路和控制方式
送丝系统结构如图1所示,对电枢电势进行同步采样,调节输出PWM占空比,经驱动隔离放大控制双向斩波电路,供给直流电动机。
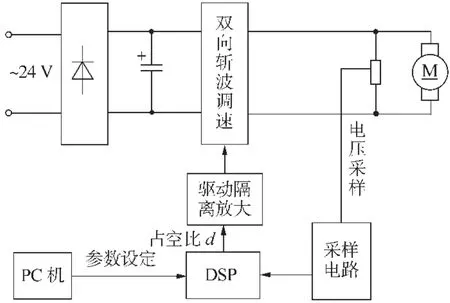
图1 系统结构框图
1.1 送丝电路
送丝系统硬件主电路如图2所示。输入的交流电压经全波整流、滤波供给由四只场效应管组成的全桥电路,DSP产生驱动信号,经TLP250驱动放大,控制场效应管VF1~VF4开通和关断,通过调整占空比大小控制输出电压以达到调节电动机转速的目的。
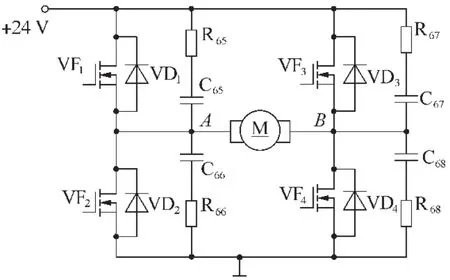
图2 送丝系统硬件主电路
1.2 控制方式
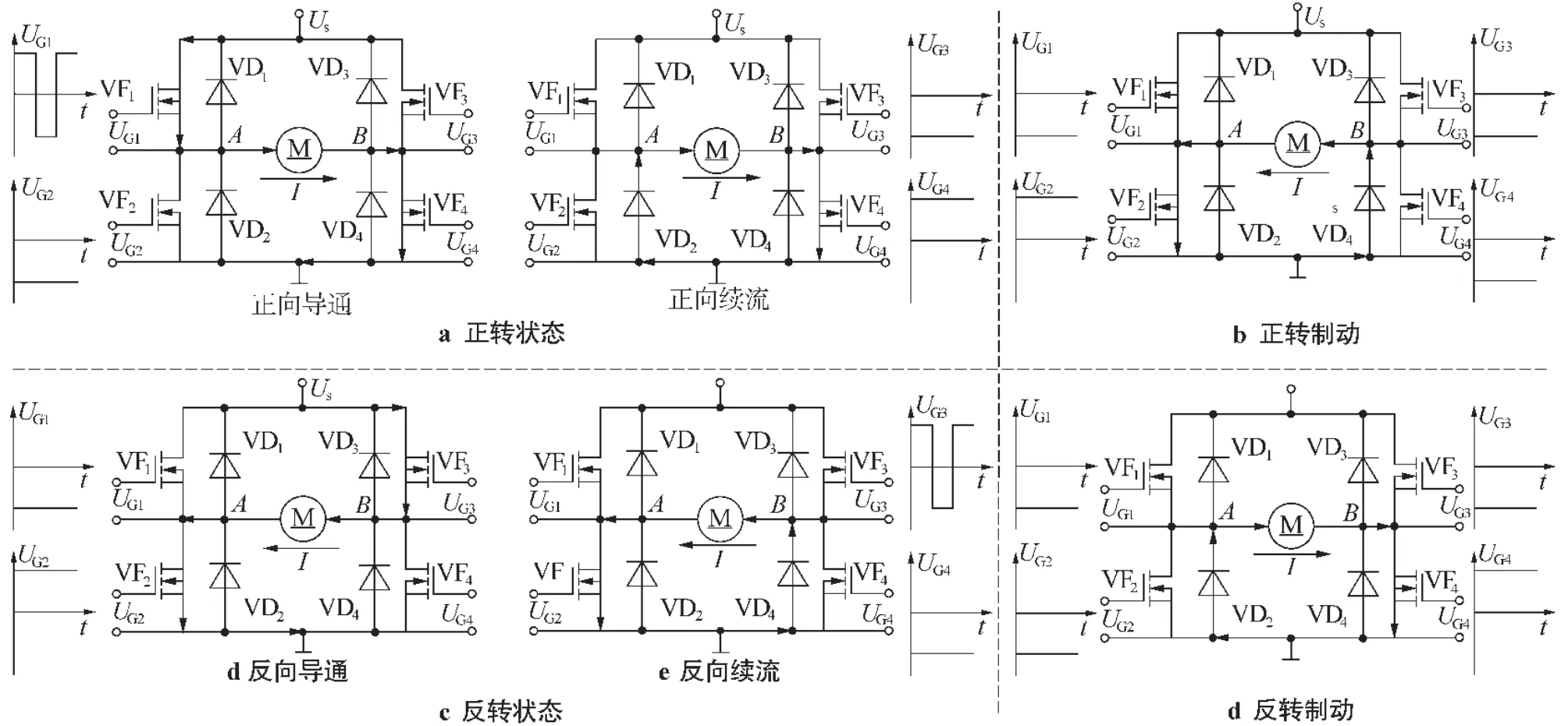
图3 电动机工作过程控制波形和工作原理等效电路
1.3 电枢电势波形分析
采用常用的直流印刷电动机,额定工作电压18.3 V,额定电流5.5 A。其等效负载如图4所示,可以等效为电阻、电感与电枢感应电势的串联[1],测得电阻值为0.9 Ω,电感值为73μ H。在前述的控制方式下,两端电压UAB波形如图5所示,满足如下关系

式中 UAB为AB两点之间电压;R为电机内阻;L为电机电感;i为流过电动机电枢的电流;Ce为电机在恒定磁通下的电动势转速比(单位:V·min/r),对应于一确定的直流印刷电机,此参数为常数;n为电机转速。
采用图2所示主电路,图3所示控制方式,开关频率10 kHz,占空比为60%,所得电枢电势与电流波形如图5所示。图5中,T1时段,场效应管VF1、VF4开通,电源提供给电动机正向电压,电动机正转;T2时段,VF1关断,电流急剧下降,电枢电感上产生抑制电流下降的反感应电势,通过VF4与VD2形成续流,在T2时刻续流结束;T3时段,电枢电流为零,由式(1)得,UAB=nCe,显然,此电势与转速成正比。

图4 电动机等效负载
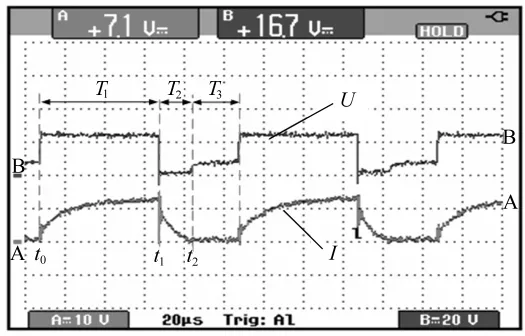
图5 输出电压波形
2 控制系统设计
2.1 采样策略
通过对电枢无电流段的电枢电势采样、负反馈控制,可以有效地改善送丝性能,但是传统的送丝控制系统采用TL494等芯片控制送丝稳定性,对电动机电压是一种连续性的控制方法,无法单独对电枢无电流段的电枢电压反馈并加以控制。在基于DSP的数字化控制送丝系统中,利用DSP所具有的数字化控制模数转换模块,在电枢无电流的感应电压段设置固定的模数转换触发点,实现同步采样,对与电动机两端电压控制是一种离散化的控制方法,可以单独控制电枢无电流段的电枢电压。图5中T3时间段,DSP可以在此时间段完成采样、模数转换以及系统控制。在本研究中,利用线性光耦SLC800设计了采样电路,对电机电压降压、隔离、采样,电枢电压与采样电路输出电压波形如图6所示,图6中曲线A为采样电路输出波形,通过对比可知,其与输入电压波形基本一致。在DSP控制系统中设定固定的模数转换触发点,可以在图5中T3时间段的电枢电势平台上进行采样,采集的电压值就是电枢无电流段的电枢电势,与电机转速成正比关系,用于反馈调速,则可以等效为转速负反馈,实现与其相适应的电机调速效果。

图6 电机电压与采样电路输出电压波形
2.2 闭环调速系统
在基于DSP数字化控制送丝系统中,采用数字PI调节方法,闭环反馈调速控制系统结构如图7所示。
①做好稻种检疫工作,不将带病的种子播种到无病田块。②做好种子处理,播种消毒后的种子。③药剂防治方法同白叶枯病。
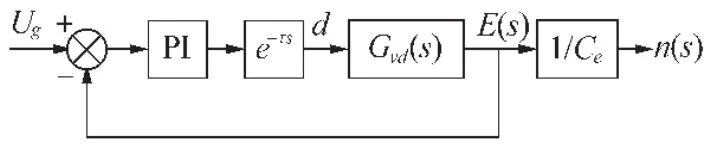
图7 闭环反馈调速系统结构
图7中PI环节传递函数

延时环节(e-τs)传递函数

PWM变换器传递函数可简化为一阶惯性环节[1]

由于闭环系统传递函数三次项系数相对其他项很小,可以将其简化为二阶系统,得

与标准形式的二阶系统比较,利用待定系数法,可以得到闭环传递函数的比例系数KP和积分系数KI。
3 实验与分析
3.1 实验方法
送丝速度的稳定性直接影响焊接过程的稳定性,从而影响焊接质量。所以,送丝调速系统性能的考核关键在于送丝阻力变化时送丝速度的稳定性[2]。一般考核送丝速度的稳定性主要指送丝速度在电网电压波动和焊枪送丝软管绕圈时的变化率,ABJ64021-1989规定了在各种干扰条件下送丝速度的变化率,具体规定如下:
(1)在规定的送丝速度范围内,电网电压在额定值±10%波动时,送丝速度的变化率不超过±5%。
(2)在供电网络电压为额定值时,送丝软管平直状态和软管中部弯绕φ 400 mm一圈情况下,送丝速度变化率不大于10%[2]。
实验中所采用的送丝机为单轮送丝装置,利用广州兰泰仪器生产的激光型转速表测量电机转速,并在一定时间内测量送丝长度以检测送丝速度,计算出送丝速度的变化率。
3.2 实验数据和分析
实验是测定闭环反馈系统在电网电压与负载变化情况下,电机转速的变化情况。其中电网电压分别为100%、90%和110%的额定电压值,对应电压值下高速以及低速送丝速度和速度变化率见表1,负载变化为送丝软管从平直状态变为打弯φ 400 mm,不同的电枢电势下送丝速度与速度变化率如表2所示,实验测得负载变化情况下电流、电压波形如图8所示。

表1 电网电压波动下速度变化率

表2 负载变化下送丝速度变化率
从表1中可以看出,在电网电压波动在额定值380 V±10%范围内,电动机转速基本保持恒定不变,而送丝速度变化小于5%,满足标准要求。
由表2可知,在负载增加的情况下,电动机转速增加,但是送丝速度却下降。这是因为在以无电流段电枢电势为控制目标的反馈系统中,可以保证图5中T3时间段电压平台值的恒定不变。随着负载的增加,控制系统的控制量即占空比增加,以维持无电流段电枢电势平台不变,电源提供能量给电动机,电动机转速增加。从表2中还可以看出,当负载增加的情况下,送丝速度略有下降,均满足标准要求。
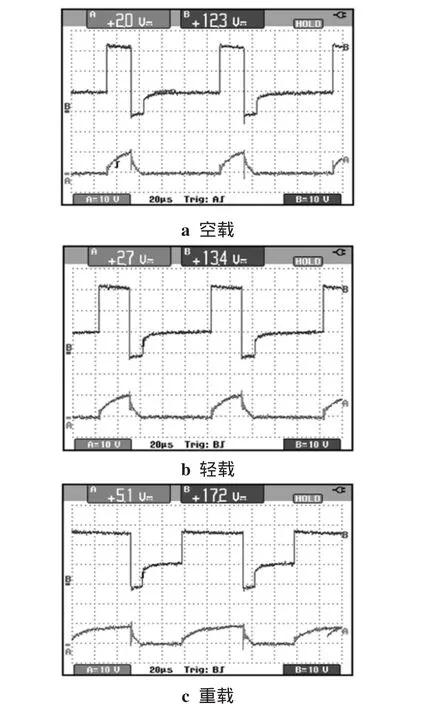
图8 负载变化情况下电流电压波形
从图8可以看出,负载增加时,占空比增加,从而在整个周期内,由负载增加导致的占空比增加,使得平均转速增加,这就是在负载增加的时候,电动机转速增加的原因。同时,由于送丝机采用单轮送丝装置,电动机负载的增加会引起焊丝和送丝轮间相对滑动,导致送丝速度下降。显然,在电动机负载增加情况下,电动机转速增加的效果可以补偿送丝速度的下降,稳定送丝速度。
4 结论
(1)利用数字化控制的送丝系统,可以实现脉动送丝、推拉送丝以及变速送丝等多种送丝方式,提供更可靠的送丝性能,配合更高要求的数字化电源控制方式,实现更高质量的焊接效果。
(2)基于DSP的数字化控制送丝系统,实现了对电动机无电流段的电枢电势采样,并反馈控制,能够排除负载电流对电机转速的影响,等效于转速负反馈,有效地保证直流印刷电机的送丝性能,送丝效果满足标准要求。
[1]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2000.
[2]殷树言.焊接设备原理与调试[M].北京:机械工业出版社,2000.
A wire-feeding digital system controlled by DSP
YAO He-qing,XU Yong,FU Qiang
(Hohai University,Changzhou 213022,China)
In this article,a Pulse-Width Modulation speed-controlled wire-feeding system,digitally controlled by DSP,is designed.Inside the system,the control target is the speed of wire-feeding,and the control method is synchronous sampling of armature voltage on the moment of no current,which can eliminate the effect from load current on the speed of wire-feeding.The digital PI regulation method is used for adjusting the Pulse-Width Modulation duty cycle to keep the armature voltage constant and improve the property of feeding.The experiments show that the rate varieties of wire-feeding on the condition of variable power network voltage and change of wire-feeding tube from straight state to a cycle of φ 400 mm at the middle all met the standard requirements.
wire-feeding system;armature voltage;load current;DSP;rate variety
TG409
A
1001-2303(2011)05-0001-05
2010-06-26;
2011-01-07
姚河清(1951—),男,湖南华容人,副教授,硕士,主要从事焊接设备及焊接过程自动控制的教学与研究工作。
猜你喜欢
火力与指挥控制(2022年5期)2022-07-25
湖南电力(2021年4期)2021-11-05
防爆电机(2020年4期)2020-12-14
初中生世界·九年级(2020年9期)2020-09-21
河北理科教学研究(2020年1期)2020-07-24
弹箭与制导学报(2020年1期)2020-07-09
弹箭与制导学报(2019年6期)2019-06-24
电测与仪表(2016年14期)2016-04-11
地震地质(2015年3期)2015-12-25
电工电能新技术(2012年2期)2012-07-02