
智能尾灯在防止汽车追尾中的应用
2011-10-21 06:05蒋大伟梁幸玲
大众科技 2011年5期
蒋大伟 梁幸玲
(1.北京航空航天大学,北京 100191;2.广西科学活动中心,广西 南宁 530022)
智能尾灯在防止汽车追尾中的应用
蒋大伟1梁幸玲2
(1.北京航空航天大学,北京 100191;2.广西科学活动中心,广西 南宁 530022)
介绍了国内交通事故的现状,并针对其中的追尾事故进行了分析,同时结合国内外现状探讨如何应用智能尾灯的技术预防追尾事故的发生,介绍了汽车智能尾灯的主要功能和构造。
防追尾;智能尾灯;汽车
(一)背景
自上世纪80年代中国开始出现私人汽车,到2003年社会保有量达到1219万辆,私人汽车突破千万辆用了近20年,而突破2000万辆仅仅用了3年时间。2010年,我国汽车的保有量达到了7000万辆。随着我国汽车保有量的不断增加,交通事故发生数量一直居高不下,造成了大量人员伤亡和经济损失,见图1。仅我国2009年一年因交通事故死亡的人数高达9.1万人[1],相当于每天有两架波音747飞机失事。据新华社报道,中国每一万辆汽车的车祸死亡率是发达国家的几十倍。2003年中国的万车死亡率是 43.5人,同年美国只有1.7人,德国1.37人,日本1.1人。据我国交通部统计数据表明,2009年,全国共发生道路交通事故 238351起,造成67759人死亡、275125人受伤,直接财产损失9.1亿元。可以说我国一直是全球交通事故死亡人数最多的国家,在国家“十二五”发展规划纲要中,降低交通事故的数量、减少人员和财产损失任是重大课题之一。
特别值得人们关注的是,在诸多交通事故中,汽车追尾则是最常见的交通事故之一,而且在交通事故中占据着很高的比例。据统计,汽车追尾事故约占美国汽车碰撞事故的20%[3],造成每年1,600人死亡和700,000人受伤。而在德国,汽车追尾事故则占到了交通事故的17%,同样造成了大量的人员伤亡和经济损失。在我国近几年的交通事故统计中,汽车追尾事故均超过了30%。在汽车行驶过程中,疲劳驾驶、注意力不集中、超速、违章停车、恶劣天气和频繁刹车往往是造成追尾事故发生的主要原因。交通密度大的城市道路往往是汽车追尾事故的高发地段,而高速公路更是多车连环追尾重大交通事故的多发地段。那么怎样才能有效地预防汽车追尾事故的发生,减少不必要的损失呢?
经研究表明,追尾事故发生的原因当中,后车驾驶员反应不及时和反应疲劳占到了事故比例的50%以上。同时传统的乘用车一般采用刹车尾灯组,即一对刹车尾灯和一个高位刹车灯,来提示后车防止追尾,但目前系统的灯光方式所表达出的信息量过于单一。因为仅通过刹车尾灯组同时亮起来表达前车处于刹车状态,不仅不能区分紧急刹车与普通刹车,而且频繁亮起也容易让后车驾驶员视觉疲劳从而放松警惕,所以不能有效地防止追尾事故的发生。如何通过有效的手段减少驾驶员的疲劳并使刹车尾灯能表示更丰富的信息,成了多数汽车企业和研发机构的研究重点。
(二)视觉对灯光闪烁频率的敏感性
在驾驶人的感觉系统中,视觉尤为重要。研究表明,驾驶人视觉所获得的信息占全部信息的80% 以上。 因此,在行车过程中,驾驶人视觉能力的高低直接关系到驾驶人的驾驶行为,因此对行车安全起着决定性的作用。
通过试验表明,灯光的闪烁频率对人视觉敏感度的影响差异是显著的,如下图2:
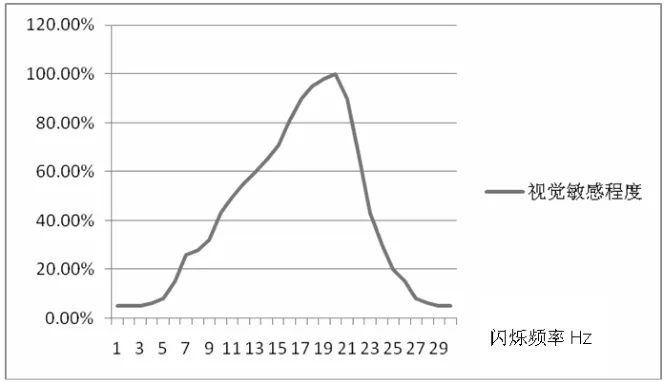
图2 视觉对灯光闪烁频率的敏感特性曲线
由上图可见,视觉对灯光的闪烁特性以17Hz到21Hz的范围内最为敏感,相应的灯光语言的设计将以此作为理论基础。
(三)汽车尾灯主动安全控制的现状
汽车尾灯主动安全控制即通过不同的灯光方式吸引驾驶人员的注意力,更为有效防止追尾事故的发生。例如:一向以注重安全著称的VOLVO轿车已经在其S80款高档轿车上装备有紧急刹车灯闪烁系统。当强力制动减速度达到1g以上时,串接于刹车灯开关的刹车灯闪烁控制装置自动驱动继电器快速间隔吸合,让高位刹车灯快速闪烁以警示后方车辆注意减速。同时,汽车停止后,危险警告灯也会自动接通向后方来车提供警示,有效避免再次发生事故;在奔驰 S级轿车上,装备了 Flashing brake light 技术,闪烁式刹车灯在急刹车时可以不停地闪烁,以提醒后续车辆采取相应的减速措施,见图3;而宝马公司则另辟蹊径采用了双段式刹车灯技术,这套系统是通过刹车灯的亮度和点亮面积来表现驾驶员施加刹车力的大小,提醒后方驾驶员注意减速,及时采取适当的措施防止追尾;东风标致 206装备有主动防追尾安全系统,在紧急制动时,危险警示灯自动频闪,尽早提醒后面车辆,预防后车追尾。

图3 奔驰公司的Flashing brake light 技术
(四)汽车尾灯主动安全控制的扩展应用
汽车尾灯也逐步向汽车智能尾灯升级,即在原有的功能中加入测距的功能。将测距仪安装在车辆后部,实时测量后车距自车的距离,进而得到两车的相对速度,根据特定安全距离模型智能判断安全等级,实施相应安全预警。一般结构如图所示:

图4 汽车智能尾灯的系统构成框图
1.测距传感器
测距传感器的使用一般分为:声学类、电磁类、光学类三种:
(1)声学类(超声波防追尾仪)
超声波防追尾仪的原理简单,成本低、制作方便。但超声波防追尾仪在应用上有一定的局限性,这是因为:第一超声波的传输速度低;第二受天气影响较大,不同的天气条件下传播速度不一样;第三测距距离较近,对于远距离的障碍物,由于反射波过于微弱,使得灵敏度下降。所以这项技术主要应用在汽车倒车防撞系统上。
(2)电磁类(毫米波雷达防追尾仪)
毫米波测距雷达可以分为脉冲测距雷达和连续波测距雷达两种。
虽然脉冲雷达的原理简单,但在具体技术实现上,脉冲测距存在一定难度。并且由于脉冲测距需在很短的时间内发射大功率的脉冲信号,通过脉冲信号控制雷达的压控振荡器从低频瞬时跳变到高频,因此它在硬件结构上比较复杂,造价高。
目前汽车在应用领域研究较多的连续波雷达的测距方式是调频连续波测距方式。其基本原理是它发射的连续调频信号遇到前方目标时,会反射回与发射信号有一定延时的回波,根据多普勒等原理对回波信号进行分析处理,从而得出两车相对速度、两车相隔距离等信息。
连续波雷达的突出优点是能穿透泥土和飞溅物“看到”物体;并且窄波束和宽波束均可使用,因而能够把波束宽度调制得适于特殊用途。
其主要缺点是微波和毫米波频段的电磁装置成本相对较高。
(3)光学类(红外防追尾仪,激光防追尾仪)
①红外防追尾仪。红外防追尾仪的原理是通过发射并接收前方物体反射回的红外线,计算出两者的时间差,以时间差和光速计算出两车的距离。红外防追尾仪实现技术简单,成本低廉,且尺寸小。主要缺点是响应时间过长,使驾驶员得到的提前报警时间常常不足以躲避碰撞,反射波随距离的增长衰减较大,所以探测距离短不满足高速公路的要求,并且受天气、雨、雾、尘埃等环境因素影响较大。
②激光防追尾仪。目前在汽车上应用较广的激光测距系统可分为非成像式激光雷达和成像式激光雷达。
A.非成像式激光雷达可以分为脉冲式和连续波式两种。
脉冲式激光测距的原理是通过激光测距仪向目标发射激光束,当信号碰到前方目标被反射回来后,记录激光往返的时间间隔,然后用光速乘以往返时间的1/2,即可获得目标的距离。
连续波激光测距的原理是利用连续调制的激光光束照射被测目标,通过测量光束往返中产生的相位变化,换算出被测目标的距离,连续波激光测距误差仅有百万分之一。
其中脉冲激光测距雷达由于实现技术比较容易,所以其应用最为普遍。
B.成像式激光雷达又可分为扫描成像激光雷达和非扫描成像激光雷达。
扫描成像激光雷达把激光雷达同二维光学扫描镜结合起来,利用扫描器控制激光的射出方向,通过逐点扫描整个视场,即可获得视场内目标的三维信息。
非扫描成像式激光雷达将光源发出的经过强度调制的激光经分束器系统分为多束光后沿不同方向射出,照射待测区域。由于非扫描成像激光雷达测点数目大大减少,从而提高了系统三维成像速度。
由于激光具有高单色性、高方向性等特点,因此激光束近似直线,很少扩散,波束能量集中,传输距离远。因此激光雷达防追尾仪具有探测距离远、精确性高、抗电磁干扰能力良好、尺寸小等特点。
但激光的灵敏度易随恶劣的天气状况及光学元件的污染而下降。同时,激光的发射能量必须限定在人眼安全水平范围之内。
2.控制单元
控制单元接收状态感知单元传递过来的自车速度、后车距离,计算出后车的速度、加速度,与设定的危险值比较、判断目前车辆所处的危险等级,向控制单元发出指令。主要结构图如图6:
目前可供选用的主要基于:单片机系统、DSP系统、arm系统、FPGA系统、微机系统。
各系统的车载能力各有强弱,单片机系统速度较慢,但成本低廉,使用较为广泛;微机系统功能强大,可以多任务执行,但价格昂贵,稳定性较差。
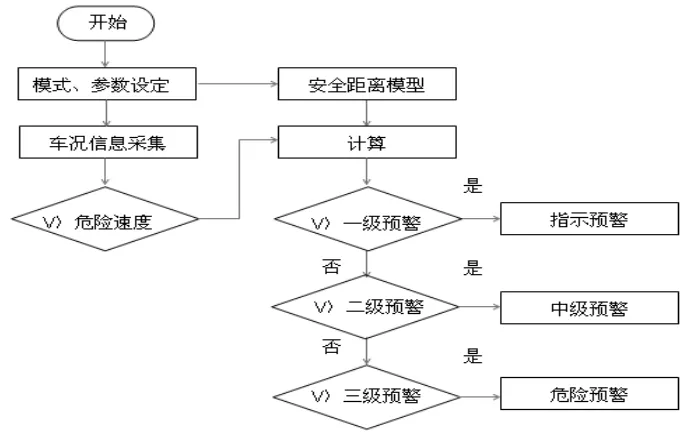
图6 汽车智能尾灯系统控制流程图
3.执行单元
执行单元一般包括:声音驱动执行系统、车灯驱动执行系统、制动和加速执行系统等。其中的制动和加速执行系统因为目前技术容易导致误操作,引起更为严重的后果,所以鲜见使用。
声音驱动执行系统以声音提示的方式给本车驾驶员预警;车灯驱动执行系统主要正对后车的预警。
(五)结论
随着人们对安全要求的提高以及计算机和微电子工艺的发展,使得现代数字系统与汽车的集成进入了新的阶段,电子系统在整车的零部件比重中将不断增加,智能尾灯作为其中的一个重要分支必然越来越受到各厂家的重视。
[1] 2009年全国道路交通事故统计,http://www.tranbbs.com/Techarticle/TInformation/Techarticle_68747.shtml.
[2] “万车死亡率”不容文字游戏,http://www.chinanews.com.cn/news/2005/2005-01-19/26/530268.shtml.
[3] 有效预防追尾 制动灯帮你忙,http://www.autoday.com.cn/news/2008-10-24_16229.html.
[4] 张朝刚.汽车驾驶员的视觉特性与行车安全[M].商用汽车,2001(9)48-49.
[5] 丁玉兰.人机工程[M].北京:北京理工大学出版(第三版),2006:98-99
U461.91
A
1008-1151(2011)05-0140-02
2011-02-23
蒋大伟(1985-),男,湖南岳阳人,北京航空航天大学在读博士,研究方向为智能车辆技术;梁幸玲(1966-),广东广州人,广西科学活动中心讲师,研究方向为人机工程。
猜你喜欢
北京测绘(2022年5期)2022-11-22
金山(2022年2期)2022-03-15
汽车零部件(2021年9期)2021-09-29
汽车观察(2021年8期)2021-09-01
模具制造(2019年10期)2020-01-06
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
汽车实用技术(2015年8期)2015-12-26
科普童话·百科探秘(2015年6期)2015-10-13
伴侣(2015年5期)2015-09-10
