一种用于生化传感检测的压电式行波微流泵的研究*
2011-10-20 10:54:36战传娜杨长锐牛文成刘国华
传感技术学报 2011年11期
战传娜,张 维,李 亭,杨长锐,岳 钊,牛文成,刘国华
(南开大学电子系,天津 300071)
表面等离子体共振(Surface Plasmon Resonance,SPR)作为一种非标记光学生物传感器技术,普遍的用于各种生物化学检测。为了提高SPR的检测效率,减少样品消耗,通常将微流控技术与SPR相结合,即在SPR生物传感器中使用微流控芯片[1]。微流泵是微流控芯片系统的核心部件,它负责为整个系统的工作提供流体驱动力,主要用于控制样品和试剂的泵送以及废料的排出,同时控制样品、试剂的流量和流速。根据其有无可动阀片,微流泵可分为有阀型微流泵和无阀型微流泵。就目前的微流泵制作工艺来说,机械式的有阀微流泵[2]制作工艺比较成熟,但由于其内部存在微阀等机械可动部件,必然受到加工工艺和加工精度的限制,不利于微型化的发展趋势。同时阀门频繁开关,稳定性和使用寿命均受到一定程度的影响。而无阀微流泵利用了流体在微尺寸下的新特点,其原理新颖,结构简单,容易加工,运行可靠,成本低廉[3]。本文提出了一种新型的无阀微流泵,它是在行波的驱动[4]下工作的。行波的产生方式是通过驱动控制电路产生四路(或更多)振幅相同,频率相同,振动方向相同,相位相差90°的方波控制信号,来驱动压电双晶片[5]阵列,利用压电陶瓷的逆压电效应把电能转换成机械振动[6],在传输微通道上激起行波,使沟道内的液体沿行波方向流动。这种无阀微流泵结构简单,制作方便,泵送液体效率高,同时可以通过控制电路实现液体的双向泵送。本文通过理论分析、模型仿真和实验测量,证明了这种压电式行波微流泵用于生物传感检测的可行性。
1 压电式行波微流泵的工作原理
行波和驻波是相对应的,波在介质中传播时其波形不断向前推进,所以称为行波。处于波动的各点在其平衡位置处振动,而其振动状态,能量沿波的传播方向向前传播。行波通常可分为瑞利波和弯曲波。行波表面的任意一点,并不是作单纯上下运动,而是作椭圆运动,无阀压电式行波微流泵正是利用弯曲波在弹性介质中的这种椭圆运动来传递能量,实现致动。本文中这种弯曲波是靠压电陶瓷的逆压电效应产生的。
其行波合成原理证明如下。
单片压电双晶片的正弦振动在微沟道壁上激起相应的振动,设为:

该振动在有限的微沟道壁上传播,传播到微沟道的另一端时发生反射,反射波为:

两列波叠加的结果是形成一列驻波:

由于四列压电双晶片的振动相位分别相差90°,故产生的四列驻波分别为:

这四列驻波叠加起来,形成了在微沟道壁上传递的行波:

当微通道的壁面以正弦行波振动时,流体质点的轨迹近似为椭圆形。经过一个周期,由于流体的粘滞性,流体质点在初始位置有了一段很小的位移。通过重复这种运动,产生了净流量[7-8]。
2 压电式行波微流泵的制作
2.1 两种不同沟道结构微流泵的设计
微流泵的沟道结构是影响微流泵性能的关键因素之一。为此我们提出了两种微流泵沟道结构,第一种是直沟道的压电式行波微流泵,其尺寸规格如下:宽100 μm,长 200 μm,高 26 μm,沟道侧壁 300 μm,压电区长8.7 mm,分布4个0.16 mm×2 mm的突起,突起的高为120 μm。图1(a)表示直沟道的结构示意图;第二种为锯齿形沟道的压电式行波微流泵。依据的是扩张/收缩管结构的不对称导致对流体阻力的不同[4]。其尺寸规格为:进口 200 μm,出口 700 μm,扩散角6.5°,微沟道高度100 μm,侧壁和顶壁厚度分别为300 μm 和200 μm,压电区长8.7 mm,分布着4 个梯形突起,突起的高度为120 μm,锯齿形沟道的结构示意图如图1(b)所示。

图1 两种不同沟道的结构示意图
从图1可以看出,这两种沟道结构的共同特点是沟道上方都有四个突起,其作用是可以使压电双晶片压下去的时候,沟道受到更大的压力,从而有助于提高微流泵的流速。
2.2 压电式行波微流泵的制作方法
无阀压电微流泵大部分采用硅微加工技术制作[9],这种制作工艺比较成熟,但是硅材料存在易碎且价格昂贵等缺陷。本文提出了一种更简单,更易实现的微流泵制作方法,即对有机玻璃进行微加工,一方面有机玻璃具有良好的光学性能,容易加工,以及价格便宜等优点,另一方面这也是由初期的实验都是在有机玻璃上实现决定的。其中,基底、压电双晶片矩阵支架、微流沟道的阳模均用有机玻璃制成,微流沟道用PDMS(聚二甲基硅氧烷)制成。
首先制作微沟道阳模,采用ProtoMat H100刻板机(LPKF公司,德国)进行微机械加工有机玻璃,制作PDMS微流沟道的阳模。ProtoMat H100属高端电路板雕刻机/刻制机,它具有加工速度快、分辨率高,修改方便等优点,能按照成本预算及时完成复杂的制模工作。
其次是制作微流泵沟道,制作微沟道的材料是PDMS(Sylgard 184,Dow Corning),制作方法是浇注法,这种方法具有准确性高,制作简单,工艺周期短,对加工环境没有特殊要求等突出优点,它可以精确复制微米级别的微结构。具体的制作过程是通过把PDMS预聚体和固化剂按一定的比例充分混合,真空脱气后浇注到阳模上,放入烘箱中加热一段时间制得。PDMS微流沟道的预聚体和固化剂的比例是10∶1,有机玻璃上涂覆的一层0.1 mm厚的PDMS,基底的预聚体和固化剂的比例是5∶1,分开两个容器充分搅拌后放入真空干燥器脱气30 min,相对真空度达到-15 psi,分别浇注在微沟道阳模和有机玻璃基底上。微沟道阳模通过注射器从上模板的针孔中缓慢注入。PDMS浇注完毕后,放入到65℃的恒温烘箱里,微沟道阳模加热30 min,有机玻璃基底加热10 min后取出,将PDMS微沟道脱模,然后粘接在有机玻璃基底的PDMS上,利用范德华力,使沟道和基底粘合在一起,初步制得微流泵。
最后是PDMS沟道的键合和表面改性。键合方法采用的是热键合,利用PDMS本身作为胶粘剂,将之前软固化的微流泵继续放在60℃的恒温箱中加热1 h,从而制得完全固化的微流泵。采用紫外光照射进行表面改性处理,使PDMS表面的-O-Si(CH3)2-基团转化为-O4Si(OH)n-基团,硅羟基的增加,使PDMS的亲水性得到改善。紫外处理不仅可以改善亲水性,还可以增加PDMS之间的粘结强度,并实现永久封合。这种方法与等离子体氧化[10]处理相比,具有设备简单,成本低,操作方便等优点。
PDMS微沟道粘接在有机玻璃基底的PDMS上,主要是通过范德华力粘在一起的,粘接强度很低,可承受压力仅为 10 g/cm[11],为了增强粘接能力,本文通过热键合和紫外线照射的方法处理,可以承受的压力得到了很大的提高[12]。
压电式行波微流泵的核心致动部件是压电双晶片,制作此微流泵用的是江苏联能电子技术有限公司生产的压电双晶片 QDA-35-2.1-0.7,它采用PZTS(锆钛酸铅)的压电陶瓷材料,具有高耦合系数和高压电应变常数,机电参数具有优异的时间和温度稳定性。四片压电双晶片按间距0.1 mm平行分布,组成压电双晶片驱动阵列,将此驱动阵列的悬臂顶端对应沟道上的四个突起,另一端固定在基底上,即可完成整个微流泵系统的制作。
2.3 压电式行波微流泵的驱动电路
驱动电路采用单片机控制电路,其核心控制芯片是单片机HT46F49E(台湾盛群半导体有限公司),此电路能够产生四路电压和频率相同,相位相差90°的方波信号,并且方波信号的频率和幅度是可调的。同时本电路也有一些附加功能,如显示输出方波的频率和电压,以及计时功能。单片机输出的是四路相位相差90°,幅度为5 V的方波信号,所以这四路信号需要与三极管相连,利用三极管的开关作用,实现电压放大功能。放大之后的四路方波信号与压电双晶片相连,利用压电陶瓷的逆压电效应,将电能转化成机械能,在微流泵沟道上激起行波。
3 结果与分析
3.1 仿真结果
首先对提出的新型压电式行波微流泵使用Fluent软件进行流体仿真。即证明行波作用在沟道上,能够驱动微沟道内的液体流动。
本研究中的问题并不涉及复杂的沟道情况,故利用二维模型对实际情况进行仿真。启动Fluent二维单精度求解器,导入划分好的网格文件,调入水的物理参数,编译UDF定义上壁面的运动。进行求解,求解的速度等值线分布情况如下图2所示。

图2 行波作用下的速度等值线图
图2左侧的图例表示速度的大小,单位是m/s,右侧图的左边表示微沟道的入口,右边表示微沟道的出口,上壁表示行波的传播。可以发现,行波作用在上壁面上之后,微流泵的沟道内部产生了速度场,说明沟道内的液体在行波的驱动下,产生了运动。同时由速度等值线分布情况可知,在靠近上壁面的地方速度比较高。
加上四片压电双晶片之后,用Fluent仿真了压电式行波微流泵沟道内流体的流动情况,图3表示微流泵内流体流动的速度矢量图,可以发现流体在行波的驱动下,产生了指向出口方向的速度。仿真结果进一步验证了行波理论的可行性。

图3 压电式行波微流泵内的速度矢量图
3.2 实验结果
将图1所示的两种微流泵沟道按照前面介绍的制作方法,封装成一个完整的微流泵。连接驱动电路,制得的微流泵系统的实物图如图4(b)所示,图4(a)表示微流泵的示意图。

图4 微流泵系统实物图
之后,在电压26 V,不同频率的条件下,对两种沟道制成的微流泵的流量进行了测量。图5显示了这两种不同结构的沟道流速随着频率的变化情况。

图5 流速随频率的变化情况
通过图5,首先可以发现直沟道结构的微流泵能达到最大流速是12.56 μL/min,对应的频率是1 453 Hz;锯齿形沟道结构的微流泵的最大流速是在1 437 Hz处得到,最大流速是:33.35 μL/min。其次可以看到在测得的各个频率范围内,锯齿形沟道结构的微流泵泵送液体的效率都有显著的提高,这是因为锯齿形沟道依据的是扩散管/收缩管原理,利用这种结构可以显著提高微流泵的泵送效率。最后可以看出两种沟道结构在最大流速时对应的频率值却没有多大的变化,这是由于制作微流泵的PDMS的弹性模量没有变化,在同样条件下,行波在其中的传播不受沟道形状的影响,仅由PDMS的弹性模量决定。
同时测量了这两种微流泵结构的最大背压,锯齿形沟道的行波微流泵的最大背压为:1.13 kPa,直沟道的行波微流泵其最大背压为:0.64 kPa。
综合上面的实验结果,可以认为锯齿形沟道结构的压电式行波微流泵具有更好的性能。将频率固定为取得最大流速时的1 437 Hz,测量锯齿形沟道结构的微流泵流速随着电压的变化情况,得出如图6所示的结果。由文献[13]可知压电式行波微流泵的流速与电压的平方成正比,图6的曲线变化情况符合这一规律。
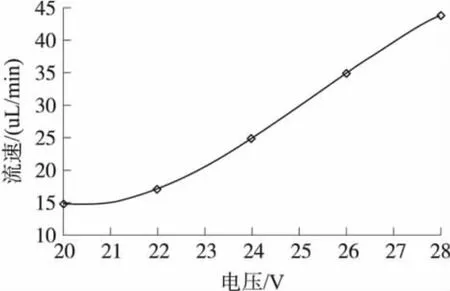
图6 锯齿形沟道结构微流泵的流速随电压的变化
4 结论
本文提出了一种可用于生化传感检测的新型压电式行波微流泵,以仿真和实验相结合的方法,研究了微流泵内部的流场流态以及两种不同结构的微流泵的输出性能,这两种微流泵管道加工尺寸的选择依据一方面是受仪器本身加工精度的局限,另一方面是在实际实验中反复试验得到的最佳尺寸组合。研究结果表明,行波微流泵理论是具有可行性的;与直沟道结构的微流泵相比,锯齿形沟道结构的压电式行波微流泵在最大流速和背压方面有着更好的性能。由于现在对微流泵的实验停留在初始阶段,所以在以后的工作中,可以通过更进一步的仿真,优化微流泵沟道的深度、宽度、锥角、扩散角和长度等参数。同时这种微流泵将来可以制作成微流控芯片,作为SPR生物传感器的反应装置,这将有助于减少样品消耗,从而提高SPR生物传感器的检测效率,包括检测通量、精确度、最低检测限和检测精度等,同时也可以推进SPR生物传感器的商业化。
[1]骆亦奇.微流控芯片在表面等离子体共振生物传感器中的应用[J].大学化学,2010,25(1):1-12.
[2]王海宁,崔大付,耿照新,等.压电双晶片驱动的压电微泵的研究[J].压电与声光,2007,29(3):302-304.
[3]Wang Mo-ran,Li Zhi-xin.Investigation Process of Micropump Based on MEMS[J].Journal of Transducer Technology,2002,21(6):59-61.
[4]Suzuki T,Kanno I, ,et al.Development of Peristaltic Soft Micropump Driven by Electrostatic Actuator[J].8th International Conference on Miniaturized Systems for Chemistry and Life Sciences,2004,2:13-15.
[5]叶会英,浦昭邦.压电双晶片传感器灵敏度特性分析[J].传感技术学报,2000,13(4):281-286.
[6]崔艳梅,刘向锋,高志.大位移压电陶瓷驱动器的有限元分析[J].传感技术学报,2007,20(10):2239-2242.
[7]Guan Yan-Fang,Zhang Guo-Xian,Jin Jian.Efficiency Analysis and Simulation Studies of a Piezoelectric Micropump with Novel Microvalve[Z].3rd IEEE International Conference on Nano/Micro Engineered and Molecular Systems.2008:323-328.
[8]关炎芳,张国贤,金健,等.无阀微泵锯齿形流道仿真模拟[J].上海大学学报(自然科学版),2008,14(4):355-358.
[9]Olsson A,Stemme G,Stemme E.Diffuser-Element Design Investigation for Valve-Less Pumps[J].Sensors and Actuators A 57 1996:137-143.
[10]王海宁,崔大付,耿照新,等.一种无阀压电微泵的研究[J].压电与声光,2006,28(6):668-670.
[11]薛向尧,张平,黎海文,等.PDMS氧等离子体长效活性表面处理及与 Si的键合[J].功能材料与器件学报,2008,14(5):877-882.
[12]叶美英,方群,殷学锋,等.聚二甲基硅氧烷基质微流控芯片封接技术的研究[J].高等学校化学学报,2002,23(12):2243-2246.
[13]Suzuki T,Teramura Y,Hata H.Development of a Micro Biochip Integrated Traveling Wave Micropumps and Surface Plasmon Resonance Imaging Sensors[J].Microsystem Technologies,2007,13:1391-1396.
猜你喜欢
煤气与热力(2021年10期)2021-12-02 05:11:44
飞天(2021年6期)2021-06-28 15:38:16
西南交通大学学报(2018年5期)2018-11-08 10:58:58
东华大学学报(自然科学版)(2018年1期)2018-06-29 03:35:10
科技经济市场(2017年9期)2017-11-28 19:00:13
智富时代(2017年10期)2017-11-22 20:06:52
电子产品世界(2016年3期)2016-03-29 05:35:12
分析测试学报(2015年4期)2016-01-13 06:18:34
分析测试学报(2015年3期)2016-01-13 06:18:11
分析测试学报(2015年3期)2016-01-13 06:18:10