ZQD-X 型直流牵引电机设计与仿真
2011-07-25 08:13徐晓敏谢超明
船电技术 2011年3期
徐晓敏 谢超明
(1. 湖北孝感供电公司,湖北孝感432100;2. 湖北职业技术学院,湖北孝感432100)
1 引言
ZQD-X型电动车是以电能为能源,通过电动机驱动车辆,将电能转换为机械能,是一种无污染的交通工具,随着电动机技术和电力电子控制技术的发展,电动车的开发越来越受到人们的关注。
电动观光车是一种以车载蓄电池组作为动力电源、靠电机驱动车轮行驶、无污染的绿色交通工具,它的发展对于解决全球性的能源和环境问题具有非常重要的现实意义。目前正在应用或开发的电动车电动机主要有直流电动机、感应电动机、永磁无刷电动机、开关磁阻电动机四类。直流电机控制简单,造价低而且技术成熟,符合我国国情,因此在我国的电动车绝大多数仍然是直流驱动系统。
本文对一种电动观光车用牵引直流电机进行了设计和仿真研究,该电机具有体积小、质量轻、价格低等特点,能够很好的满足观光车的技术要求。其主要技术参数如下:
额定功率:3 kW
额定电压:48 V
额定转速:2800 r/min
2 ZQD-X型直流牵引电机电磁参数与基本尺寸
2.1 基本电磁参数[1]
电负荷A=120 A/cm
电枢电流密度Ja=11.15 A/mm2
励磁绕组电流密度JAlf=3.5 A/mm2
每极磁通f=4.03 mWb
气隙磁密Bs=0.87 T
电枢齿磁密Bta=1.985 T
电枢轭磁密Bja=1.25 T
主磁极磁密Bm=1.726 T
机座磁密Bj=1.011 T
2.2 基本尺寸
电枢外径Da=11.1 cm
电枢内径Dia=3.4 cm
电枢长度La=8.3 cm
槽数Z=29
槽尺寸(矩形):槽深hs=1.3 cm,槽宽bs=0.4 cm,齿宽bt1=0.8 cm,bta(min)=0.52 cm,bta(1/2)=0.66 cm,bta(1/3)=0.614 cm
机座外径Dj=17.5 cm
机座内径Dij=14.6 cm
机座长度Lj=16.5 cm
3 ZQD-X型直流牵引电机机械结构特点
牵引电机的特殊工作环境和特性,对直流牵引电机的设计结构、制造工艺和维修等都有着更高的要求。相比于普通直流电机,ZXQT-3型直流牵引电机在机械结构上采取了以下改进措施:
(1)牵引电机的振动、噪声过大是比较普遍的故障。振动过大会引起电机换向恶化、轴承损坏、连线断裂等故障,对电机的寿命有着直接的影响。根据电动机磁势分析,由于气隙中存在着基波和高次谐波分量,而高次谐波分量的分布及转子绕组的感应电势受齿槽的影响较大。在每极每相槽数 q为整数的三相电动机中,存在次数v=2mq±1较强的高次谐波电势,即齿谐波电势。齿谐波产生的转矩,使机座产生挠曲和横向振动,不利于电机的运行性能,必须加以抑制。降低齿谐波电势的有效方法是将转子齿槽做成斜槽。
将转子槽相对定子扭斜一个角度,可以相对地削弱齿谐波感应电势引起的电磁振动和噪声的交变径向力。根据现有几何参数,对电机的转轴作6.75°的斜槽处理。
(2)电机运行中,换向器既要传导电流,又要受离心力和热应力的作用。这就要求换向器具有足够的强度,刚度以保证片间压力;在电机起动、制动或超速运转情况下,以及在允许的温升限度内,其形状保持稳定,不产生有害的变形;工作表面光滑平整,具有较高的耐磨性、耐电弧性,耐热性,并具有可靠的对地绝缘,片间绝缘与爬电距离。
采用直接加热后套轴式结构,换向器套筒与轴之间为过盈配合,以增强换向器的传动随行,避免升高片的扭振。换向器的工作表面的直径长度应符合规定的公差,达到换向片的平面度要求,成为规则的圆柱形,圆柱公差应该小于0.03 mm,保证换向器表面的平整度和径向跳动值在要求范围之内。
4 ZQD-X型直流牵引电机调速仿真分析
应用 Matlab/Simulink对电机进行电流-转速双闭环仿真,对转速和电流波形进行分析。斩波调速又称为脉宽调速,是在直流电源电压基本不变的情况下通过电子开关的通断,改变施加到电动机端的直流电压平均值,从而达到调速的目的。斩波调速对于改善电网功率因数和减少谐波对电网的影响都是非常有利的,蓄电池供电的直流电动机一般都采用斩波调速。
4.1 斩波调速系统的仿真原理
转速、电流分别通过两个独立的调节器控制,电流调节环为内环,转速调节环为外环。为了获得良好的静、动态性能,转速、电流双闭环调速系统的两个调节器都采用PI调节器。转速调节器的输出就是电流调节器的给定,电流环能够随转速的偏差调节电动机的电枢电流。当转速低于给定转速时,转速调节器的积分作用使输出增加,电流给定上升,通过电流调节使电动机电流增加获得加速转矩,反之亦然。
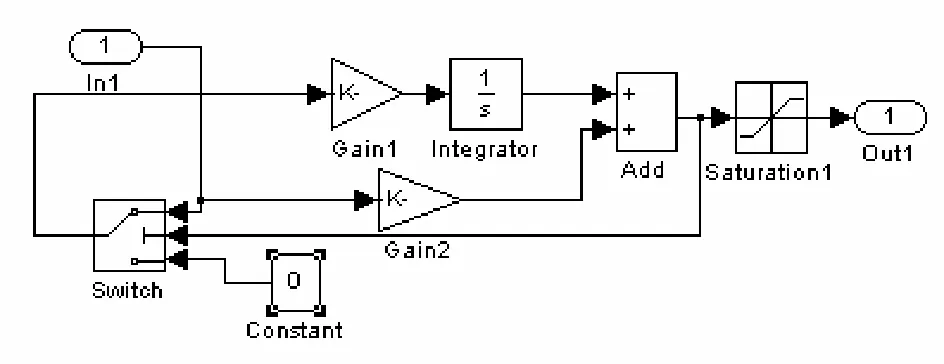
图1 PI调节器仿真模型
4.2 仿真参数
电机:Ua=48 V,I=76 A,n=2800 r/min,Ra=0.0379 Ω,Toi=0.002 s,Ton=0.01 s,Ts=0.0017 s。
4.2.1 电流调节器参数[2]:
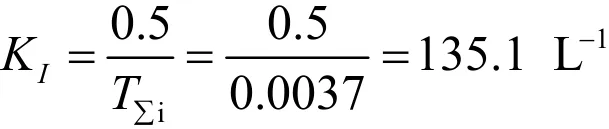
Gi=τi=0.01134 s,电流开环增益:按d≤5%,取KIiT∑=0.5
ACR的比例系数为:
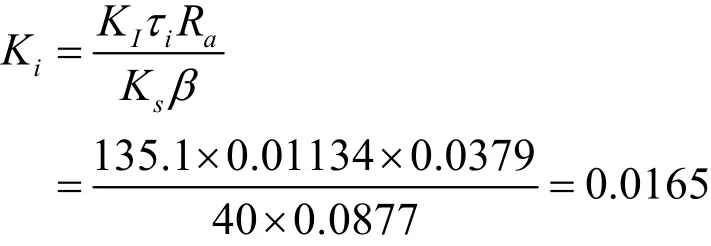
积分系数为Kip=1.455
4.2.2 转速调节器的参数
按跟随和抗扰性能都较好的原则,取 h=5,则 ASR的超前时间常数:

转速开环增益

ASR比例系数为 :
积分系数为Knp=303.9
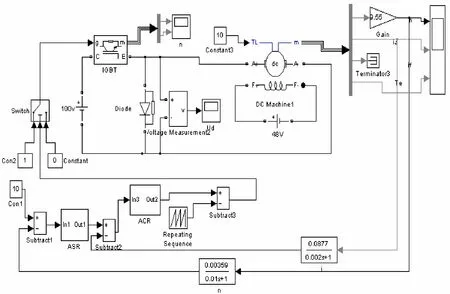
图2 ZQD-X 型电机双闭环调速仿真模型
图3-5为电动机起动时的电流、转速响应曲线。结合实际,设定电动机为满载起动。可以看出,在0.2 s时起动过程结束,转速达到额定转速2800 r/min,电枢电流达到61 A,输出转矩为10 N.m,仿真结果基本与设计相符。修改调节器参数和转速给定可以得到不同参数和不同给定下的响应曲线。

图3 转速仿真波形
4.3 ZQD-X型直流牵引电机起动分析
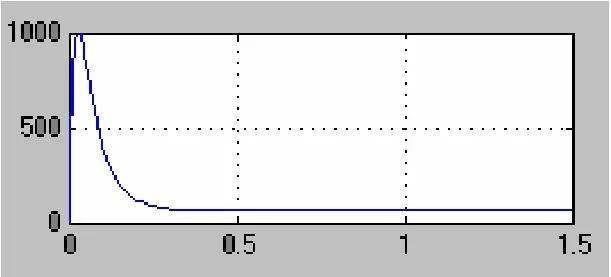
图4 电流仿真波形
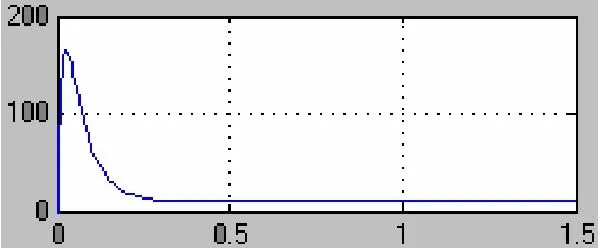
图5 转矩仿真波形
牵引电机的起动性能由起动转矩和起动电流大小来衡量。起动转矩倍数与起动电流倍数是衡量起动性能的两项重要指标。在起动时,应具有足够的起动转矩,但起动电流不宜过大,应限制在容许的范围内。结合仿真,本文牵引电机起动电流倍数设计为:

起动转矩倍数为:

可见,在起动瞬间电流为额定电流的 3.68倍,最大转矩倍数为4.84倍,能够很好的满足牵引电机低起动电流、大起动转矩负载的要求。
4.4 负载机械特性曲线分析
对于电动车用电动机,其机械特性是非常重要的。电动车起动和爬坡时速度较低,但要求力矩较大;高速运行时需要的力矩较小,而速度很高。即要求牵引电机在低速时为恒转矩特性,高速时为恒功率特性,且电动机的运行速度范围应该较宽。
在电动车上,最常用的为他励和串励直流电动机。串励直流电动机的励磁电流和电枢电流相等,能获得每单位电流的最高转矩,起动转矩较大、具有较宽的恒功率调速范围。他励直流电动机能够分别控制它的励磁电流和电枢电流来实现控制,他励直流电动机具有线性和稳定输出特性,可以扩大其调速范围,能够实现在减速和制动时的再生制动,回收一部分能量。
ZQD-X型他励牵引电机由蓄电池供电,再采用PWM斩波器进行斩波调压。PWM驱动装置具有下列优点:需用的大功率可控器件少,线路简单;调速范围宽;电流波形系数好,附加损耗小;功率因数高等。ZQD-X型他励牵引电机机械特性试验曲线图如图6。
5 结语
本文设计的 ZQD-X型直流牵引电机经过仿真,样机试制和试验,能够很好的满足电动观光车的运行要求。为电动观光车等方面的应用提供了更为广泛的选择余地。
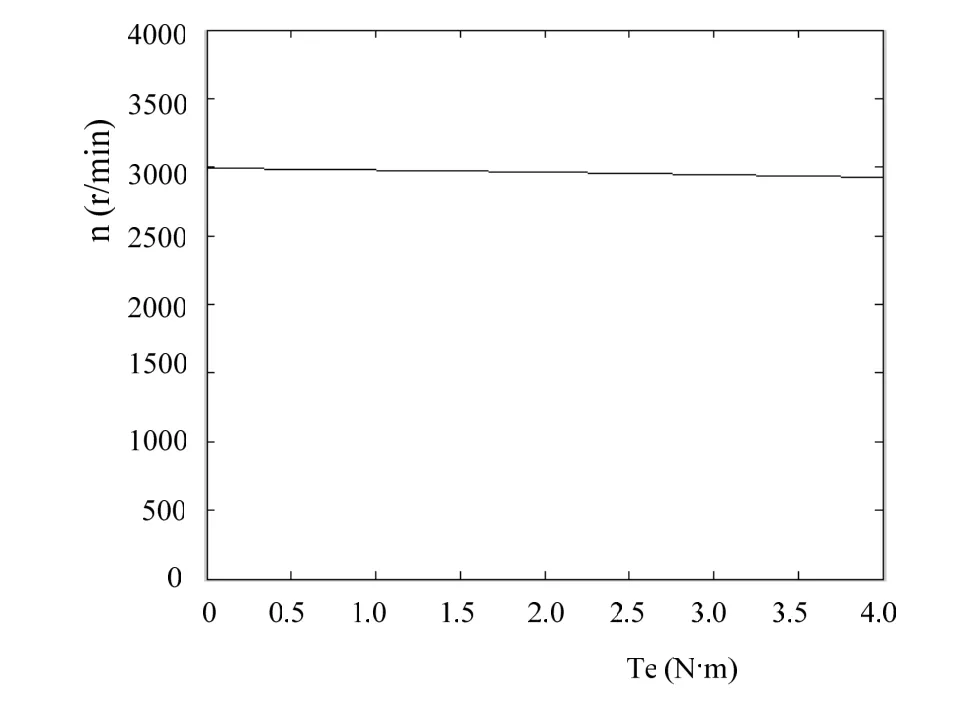
图6 机械特性曲线图
[1] 上海工业大学, 上海直流电机厂. 直流电机设计.北京: 机械工业出版社, 1983.
[2] 陈伯时. 电力拖动自动控制系统. 机械工业出版社,2000.
猜你喜欢
火力与指挥控制(2022年5期)2022-07-25
哈尔滨铁道科技(2020年1期)2020-07-27
弹箭与制导学报(2020年1期)2020-07-09
中国设备工程(2020年19期)2020-01-20
弹箭与制导学报(2019年6期)2019-06-24
上海大中型电机(2018年3期)2018-09-22
电源技术(2015年9期)2015-06-05
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年3期)2015-04-09
汽车与新动力(2014年2期)2014-02-27