
利用动态定位模块Track进行GPS单历元定位研究①
2011-07-18 03:49李林红何秀凤
全球定位系统 2011年6期
李林红,何秀凤
(河海大学卫星及空间信息应用研究所,江苏 南京210098)
0 引 言
高精度GPS动态定位方法有着广泛的应用前景,如在工程测量领域可应用于地形测量、水下地形图测绘和工程放样;在安全监测方面可应用于大型桥梁、高层建筑物、高边坡和水利工程大坝等的变形监测;在航空航海领域中可应用于确定飞机和船舰的位置、速度和姿态方位等。
GPS整周模糊度的确定是高精度动态定位的关键。整周模糊度一旦正确解算,载波相位观测值便可转换成高精度的测相伪距,从而使用一个历元数据就能实现厘米级的高精度定位。采用单历元数据求解整周模糊度的优点是仅利用当前观测历元的GPS观测数据,不受观测过程中周跳的影响[1]。模糊度的快速动态确定,一直是GPS高精度动态定位的热点问题。近二十年来,许多学者对模糊度的动态解算进行了深入的研究,提出了各种动态定位过程中确定模糊度的方法(AROTF),主要有基于观测值域的双频P码伪距法、基于坐标域的模糊度函数法(AMF)、基于模糊度域的最小二乘搜索法(LS)、快速模糊度搜索滤波法(FASF)、快速模糊度解算法(FARA),Cholesky分解算法,LAMBDA 方法和局部最小值法等[2-3]。采用以双频P码伪距观测值为例利用单历元数据先通过确定宽巷模糊度,进而确定L1,L2模糊度的动态定位算法。
1 Track模块
Track是麻省理工学院开发的GAMIT/GLOBK软件包中的一个动态双差定位模块,根据双差定位的特点,在定位过程中需要定义一个相对稳定的测站作为参考站,它可以解算得到动态观测站每个历元的大地测量坐标,亦可解算得到观测站相对于参考站的地方空间直角坐标差,从而获得观测站的运动轨迹。
Track的解算过程主要包括以下三个步骤[4]:
1)读取Rinex格式的观测数据,根据数据情况分配模糊度参数;
2)解算模糊度整数值;
3)用已确定的模糊度整数值解算观测点的运动轨迹。其中以步骤2)最为耗时,这也是动态GPS数据处理的关键问题之一。
Track使用目前普遍使用的利用双频P码伪距观测量和相位观测量组合求解模糊度的方法,即“M-W”方法来计算宽巷模糊度[5]:

式中:fi(i=1、2)为 L1、L2波段的载波频率;φi为对应的相位观测量;Pi为对应的伪距观测量;c为光速。
Track中卫星钟差和轨道误差可以采用IGS数据中心提供的精密钟差和星历来消除,电离层影响可以采用消电离层模型消除,其式为

式中:fi(i=1、2)为 L1、L2波段的载波频率;φi为对应的相位观测量。在数据处理时估计的参数,采用卡尔曼滤波器对先前历元信息进行充分利用,对流层延迟等相关误差采用对应的模型进行消除[7]。当模糊度固定后,利用长基线估计策略并采用平滑技术[8],即将固定后的参数进行回代到初始历元以达到每个历元的最佳状态估计。
Track常用来处理来自汽车、飞机等快速运动平台上的数据,可以同时处理一个基准站和多个流动站的GPS数据,因此,Track是处理动态GPS数据比较理想的工具。
2 获取载体运动轨迹实验研究
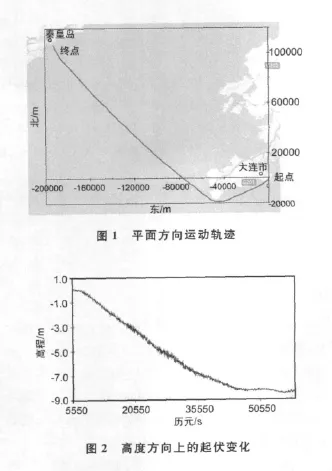
实验采用安装在船上的Topcon Net-G3接收机采集GPS观测数据,该船于2010年11月22日由辽宁大连开往河北秦皇岛。GPS接收机采样频率为1Hz,共采集近15h的数据。选取IGS跟踪站SHAO作为本次实验基准站,基准站数据采样间隔为30s.经过Track模块的解算,得到测站地方空间直角坐标系NEU下流动站各个历元相对于参考站的三维坐标差。解算结果如图1~2所示。
图1为动船的平面运动轨迹,该轨迹清晰地反映了载体在海上的运动路线。图2为动船在高度方向的起伏变化情况。可以看出,经Track解算,起点比终点的海平面高出约8.3m,此数值与从Google Earth上获取的相符。
3 解算地震形变实验研究
2011年3月11日,UTC时间05:46:23(日本当地时间14:46:23),日本东北海域发生里氏9.0级地震,造成重大人员伤亡和财产损失。地震震中位于日本本州岛仙台港以东130km处,震源深度20km.
对于静态数据,Track也可以将其假设为动态数据进行解算。实验选取日本境内的4个IGS站MIZU、USUD、MTKA和 TSKB作为动态观测站,图3示了这四个位置的分布。选取中国境内的SHAO站作为参考站,各IGS站数据采样间隔均为30s.经Track解算,得到上述4个动态观测站相对于参考站的NEU三维坐标差,从而得到地震前后位移量。Track还可解算得到观测站双差相位观测量RMS.限于文章篇幅,仅绘出 MIZU和USUD两个站地震当天05:45:00-05:55:30的位移变化量和对应时刻的双差相位观测量RMS.

图3 震中和动态观测站位置
图4为 MIZU和USUD两个站05:45:00-05:55:30时间段内每个历元的双差相位RMS变化情况。从图中可以看出,两个站的RMS大致相同,集中在18到26mm之间,最大不超过30mm.另外两个流动站MTKA和TSKB的RMS与此基本一致。
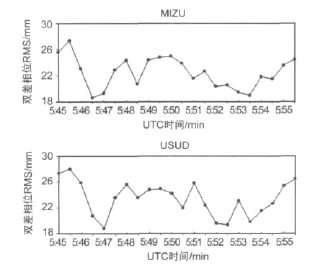
图4 MIZU、USUD两个站的双差相位RMS
从图5MIZU站位移变化可以看出,地震造成MIZU站向东约2m、向南约1m的永久位移,该站从05:47:00附近开始发生较明显位移,最大位移发生在05:48:30附近,该站距离震中最近,位移最大。从图6USUD站位移变化可以看出,地震造成USUD站向东近20cm的位移,最大位移发生在05:49:30附近。从其余两个站的解算结果可知,MTKA站在地震发生时刻北、东、高三个坐标分量的最大振幅分别为70cm、30cm、30cm,在主震结束之后坐标又反弹回到与初始坐标分量相差不大的位置,最大位移发生在05:49:30附近;地震造成TSKB站向东偏移约30cm,向北偏移约10 cm,高程方向的坐标在主震结束之后又回到与初始分量相差不大的位置,东方向的最大位移发生在05:49:30附近,北、高方向的最大位移发生在05:49:00附近。

4 结 论
GAMIT的Track模块可以解算得到观测站每个历元的大地测量坐标,或相对于参考站的地方空间直角坐标差,从而获得观测站的运动轨迹。利用Track模块对获得的GPS观测数据进行了单历元方法处理和分析。研究表明,由安装在动船上的GPS接收机采集动态观测数据,通过Track模块解算可得到该动船在水平方向上清晰的运动轨迹和高度方向上的起伏变化情况。研究还表明,利用Track模块处理日本地震观测数据,解算得到双差相位观测量RMS在3cm以内,可获得GPS测站记录到的地震动态位移,且可有效探测主震的发生时间。
致谢:感谢国家海洋局第一海洋研究所提供动态GPS数据。
[1]喻国荣.单历元模糊度解算问题[J].测绘通报,2003,11:6-7.
[2]胡丛玮,刘大杰.单历元确定GPS整周模糊度的分析[J].南京航空航天大学学报,2001,33(3):267-270.
[3]孙亚峰.单历元定位技术及其在地震观测中的应用[D].上海:同济大学,2009:23-25.
[4]TRACK.GPS differential phase kinematic positioning program [EB/OL].[2011-07-28].http://geoweb.mit.edu/~simon/gtgk/help/track.hlp.htm.
[5]黄丁发,熊永良,袁林果.全球定位系统(GPS)—理论与实践[M].成都:西南交通大学出版社,2006:85-86.
[6]苏小宁.单历元高频GPS在地震学中的应用[C]//中国地震学会空间对地观测专业委员会2009年学术研讨会论文摘要集,2009:49.
[7]HERRING T A,KING R W,MCCLUSKY S C.GAMIT reference manual:GPS analysis at MIT,release 10.3[EB/OL].(2010-10-28)[2011-07-28].http://www-gpsg.mit.edu/~simon/gtgk/GAMIT_Ref.pdf.
[8]周 星.基于GAMIT TRACK和Bernese PPP的地震监测比较[J].测绘信息与工程,2010,35(2):19.
猜你喜欢
北京大学学报(自然科学版)(2022年4期)2022-08-18
山东理工大学学报(自然科学版)(2022年5期)2022-08-18
科学导报(2022年39期)2022-07-04
导航定位学报(2020年6期)2021-01-05
火力与指挥控制(2020年1期)2020-03-27
全球定位系统(2019年4期)2019-08-30
优雅(2019年7期)2019-07-03
全球定位系统(2018年5期)2018-11-20
空天防御(2018年1期)2018-04-16
航空学报(2017年5期)2017-11-20
