
基于DSP的智能无刷直流电机控制策略研究
2011-07-10 06:54随顺科孙长江
制造业自动化 2011年15期
随顺科,孙长江,王 雁
(中国矿业大学 信息与电气工程学院,徐州 221116)
0 引言
无刷直流电机是在有刷直流电机的基础上发展起来的,使用了电子换相原理的无刷直流电机具有结构简单、运行效率高、无励磁损耗以及调速性能好等众多优点被广泛应用于运动控制等领域。无刷直流电机控制器则经历了从分立元件的模拟电路,专用集成电路到全数字化控制电路的发展过程。随着微处理器技术的发展,采用以数字信号处理器为核心的控制技术,运用智能控制理论为代表的控制策略,将实现对无刷直流电机数字化、智能化控制。
1 总体硬件设计
1.1 无刷直流电机的组成
无刷直流电机结构原理如图1所示,它主要由电机本体、位置传感器和电子换相器三部分组成。电机本体由转子和定子组成,转子由呈弧形的永磁钢按照一定的极对数组成,定子绕组一般分成三相且多使用整距集中式绕组,磁极下定转子气隙均匀,气隙磁通密度呈梯形分布。位置传感器安装在定子线圈的相应位置上,在直流无刷电机中起着检测转子磁极位置的作用。电子换相
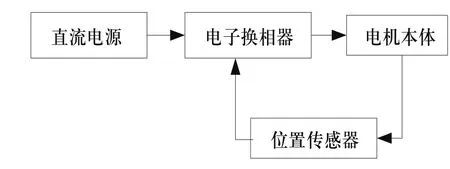
图1 无刷直流电机结构原理图
器主要由功率开关和位置信号处理电路组成,用来控制定子各绕组通电的顺序和时间。
1.2 控制系统硬件设计
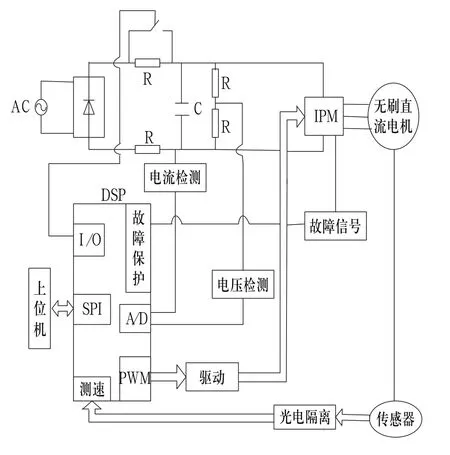
图2 无刷直流电机控制系统硬件结构原理图
基于DSP的无刷直流电机总体硬件构成如图2所示,主要由DSP及外围电路、功率驱动电路、保护电路及反馈检测电路等构成。DSP主控电路以TMS320LF2407A为控制核心,它是TI公司推出的一款功能较为齐全的16位定点数字信号处理器。能够完成对各种信号的处理和系统的闭环控制,并且利用SCI接口实现控制器与上位机的通讯。整个控制系统的工作原理如下:在电机以一定方式启动后采用PWM方式实现对无刷直流电机进行闭环控制,闭环调节过程中输入交流经过整流电路形成直流,稳压后向逆变电路提供直流电源。而给定的转速则由DSP的I/O口输入,经A/D转换将模拟信号转化成数字信号。位置信号用于控制换相,由位置参数计算出电机转速,与给定转速比较,修正偏差产生的电流参考量与电流反馈量作比较,这样就可以通过调节脉冲宽度改变控制功率管的开关时间,从而实现对无刷直流电机的控制。
下面针对DSP外围电路中的PWM驱动电路设计过程进行详细阐述。主电路中逆变器采用的是集成了驱动与保护电路的智能功率模块IPM,使得DSP和IPM的驱动电路和接口变得简单。DSP芯片的PWM输出电平为3.3V,由于受到驱动能力的限制,所以选用6缓冲驱动芯片74LS07,然后直接驱动光耦组成IPM驱动隔离电路。图3为PWM输出框图。
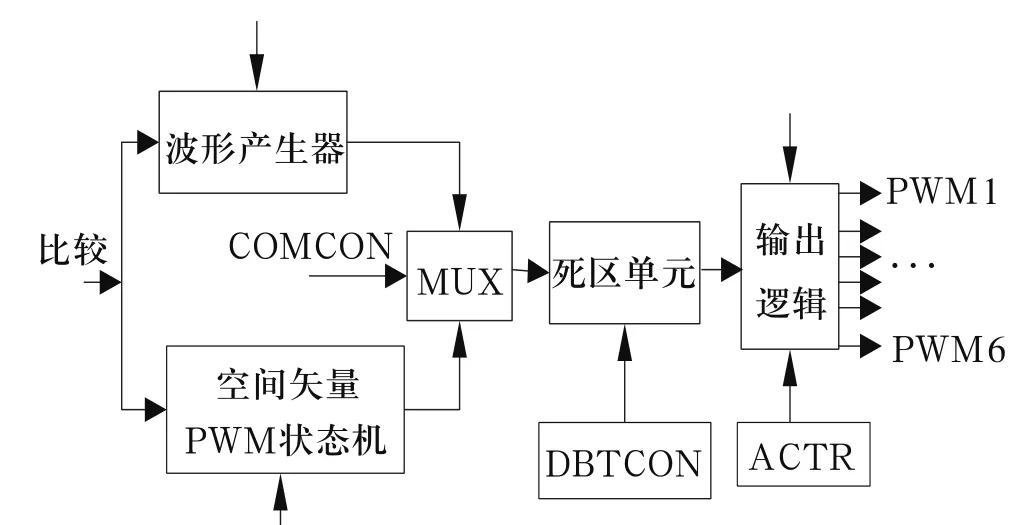
图3 PWM输出框图
功率驱动电路的作用是将控制电路输出的脉冲信号进行功率放大,以完成对MOSFET或IGBT的驱动。本文选取三相桥式驱动器IR2130,它可以在低于600V的电路中工作,且具有欠压保护和过流保护等功能。
直流电源电压过高或过低都可能影响电机的正常工作。电压过高会损坏功率器件和电机本体。而电源电压过低会引起电流增大使开关损耗增加。为保证系统的安全可靠运行,系统中设计了欠压、过压保护电路。图4为过压保护电路,直流电源电压经分压电路输入到比较器的同相输入端,比较器的反相输入端接固定的电压阀值。将电压值与设定的阀值作比较,电压正常时,比较器输出低电平。当电压过高时,比较器输出高电平。此时控制器立刻停止电机运行,保护系统安全。同样可以调整分压阻值,将该电路设计为欠压保护电路。

图4 过压保护电路图
检测电路包括电流检测和电压检测,下面主要对电流检测进行设计。本设计中电流检测主要用于电机定子电流反馈调节。图5为电流检测电路。通过检测电阻两端的电压降,检测出电阻两端的电压,然后就可以得出流过电阻的电流。

图5 检测电流电路图
2 控制系统软件设计
2.1 系统软件设计
系统软件的功能就是控制设计好的硬件电路,使其能够按照预定的流程,进行工作。为了能够适应复杂多变的运行环境,本文引入遗传优化的模糊PID控制算法,使调节过程具有自适应、自组织等智能特性。速度环使用遗传优化的模糊PID控制,给定速度与速度反馈形成偏差 ,相邻采样周期之差形成偏差变化率 ,利用偏差和偏差变化率查询控制规则表,实现对转速的控制调节。
图6为控制系统总体流程图。系统得电后,DSP存储单元和部分寄存器先初始化,等到电压稳定时等候电机启动指令的输入。当有启动指令时则进行启动初始化,然后设置预定位步长和发送功率电路控制脉冲,当预定位子程序结束时电机转子恰好处于一个确定位置,随着转速的升高,反电动势达到一定值,这样通过反电动势过零信号就可以检测出转子位置,这样根据检测的速度和位置信号对电机进行闭环调速。有保护中断信号或停止信号时,电机关断主电路,停止运行。
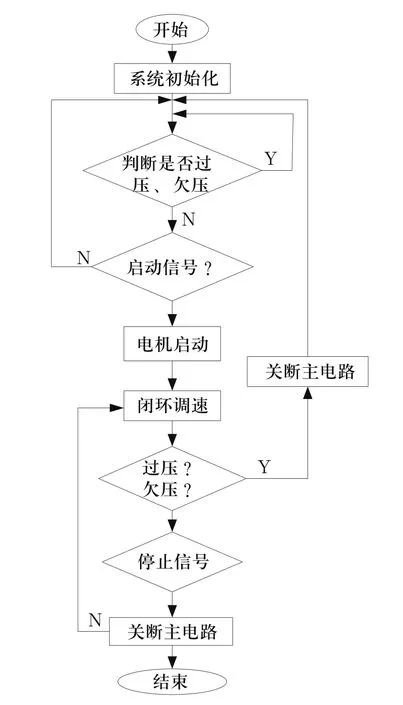
图6 控制系统总体流程图
转速控制子程序流程如图7所示,这个过程中需要量化检测到的偏差e(k)和偏差变化Δe(k),控制规则表事先根据专家经验设计出了一个初始规则表,为了能够控制的更加精准,本文又引入了遗传算法对规则表进行优化,实现自适应控制。
2.2 仿真验证
本文利用Matlab建立了控制系统仿真模型。图8为遗传模糊PID控制下的转速响应曲线,在遗传模糊PID控制下,系统在很短时间进入稳态,在t=0.6秒时加负载,转速发生突降,但很快又恢复到平衡状态。
3 结束语
由于DSP芯片具有运算快、扩展性强等特点,使用DSP芯片控制无刷直流电机,大大简化了硬件电路的设计,提高了系统的可靠性,增强了系统控制的快速性和灵活性。引入遗传模糊PID控制算法,使控制器能够自适应的根据系统的运行状态对参数进行调整,提高了系统的响应速度和控制精度,使系统更加稳定。
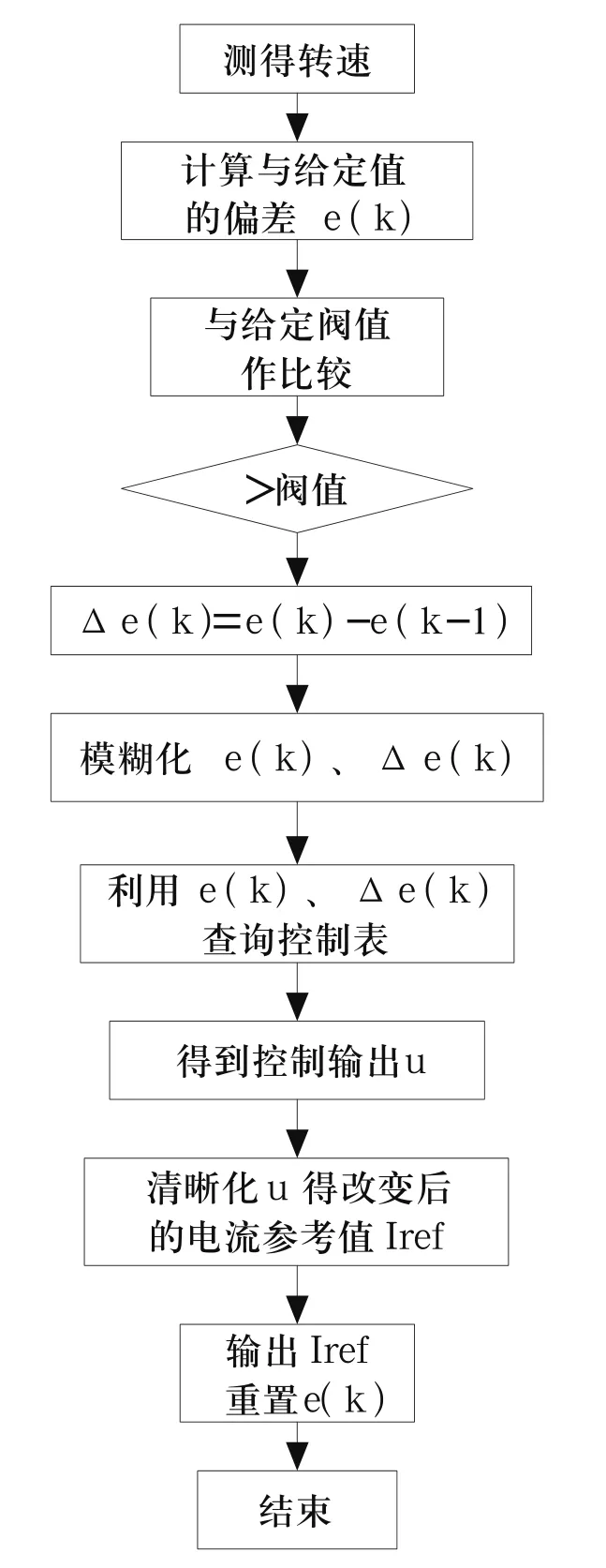
图7 调节转速子程序流程图
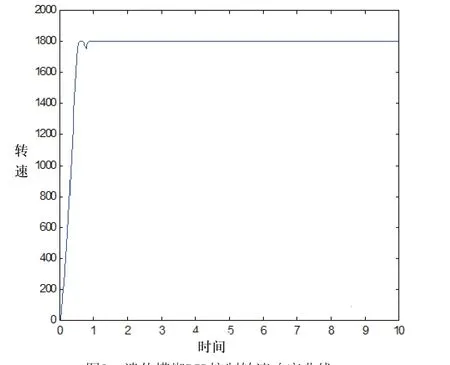
图8 遗传模糊PID控制转速响应曲线
[1] 杜坤梅.电机控制技术[M].哈尔滨:哈尔滨工业大学出版社,2002.
[2] 王春民,乔瑞芳.基于DSP和IPM的三相无刷直流电机控制系统[J].吉林大学学报,2007(l):62-67.
[3] 吴雪梅,景占荣,史永奇.基于DSP的直流无刷电机控制技术研究[J].机械与电子,2005(3):50-52.
[4] 张兴全.基于DSP的无刷直流电机控制系统研究[D].哈尔滨工程大学自动化学院,2008.
[5] 王晓明,王玲.电动机的DSP控制[M].北京:北京航空航天大学出版社,2004.
[6] K.Y.Cheng,Y.T.Lin,C.H.Tso and Y.Y.Tzou,"Design of a Sensorless Conlnnutation IC for BLDC Motors"2002 IEEE Annual Power Eleetronics Specialists Conference,2002,7:23-37.
[7] 陈隆吕.控制电机[M].西安:西安电子科技大学出版社,2003.
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
中国特种设备安全(2022年1期)2022-04-26
商界评论(2022年1期)2022-04-13
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
学生天地(2020年6期)2020-08-25
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
