
注塑机械手振动控制研究
2011-07-07 08:48李志刚张文亮
制造业自动化 2011年20期
李志刚,张文亮
(华东交通大学 载运工具与装备教育部重点实验室,南昌 330013 )
0 引言
塑料加工行业在我国的迅速发展,注塑成型设备的自动化程度也越来越高。现代化的注塑机常常配置有机械手,以提高生产效率。注塑机械手是为注塑生产自动化专门配备的机械,它可以在减轻繁重的体力劳动、改善劳动条件、降低生产成本、增强企业的竞争力等方面起到及其重要的作用[1]。
在实际工作过程中,注塑机械手在低频率下会产生剧烈的振动,影响机械手的工作可靠性,容易产生因机械手的误操作而使被取件报废等事故。因此,降低机械手的低频振动对提高生产效率和稳定产品质量有着极其重要的作用[2]。本文在分析某机械手的取件工作过程特性的基础上,结合其本身的结构特点,改善机械手的动力特性,以提高注塑机械手的取件定位精度。
1 机械手模型
机械手的结构比较复杂,建模时对于箱体盖、线路托板、气缸、缓冲器等对模型动力学分析影响不大的部件均忽略掉,以减少有限元模型的规模,仅将其质量折算到相应位置[3]。首先利用三维软件设计出机械手模型,如图1所示,该机械手模型主要由以下几部分组成:基座、主臂梁、箱体、副臂梁等。
在ANSYS中,solid45单元用于构造三维实体结构。单元通过8个节点来定义,每个节点有3个沿着x, y, z方向平移的自由度,单元具有塑性,蠕变,膨胀,应力强化,大变形和大应变能力。所以注塑机械手模型采用ansys-solid45单元,将模型划分为57502个单元格。
1.1 机械手静力特性分析
静力分析是不考虑惯性和阻尼影响,用来计算结构受到固定不变载荷作用的应力、应变大小的。机械手运动到各轴最大位移处,机械手的应力和应变最大。在机械手简化模型副臂梁的侧部施加竖直向下的100牛顿的力,模拟机械手的实际工作状况[3]。

图1 机械手结构示意图
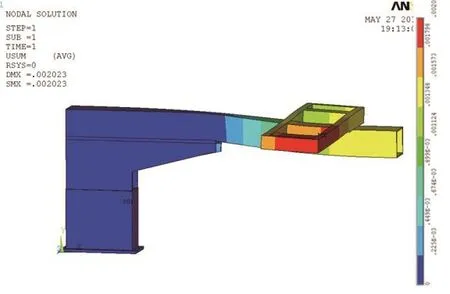
图2 机械手应变云图

图3 机械手应力云图
图2和图3分析云图可见,机械手的副臂梁前端节点处的最大值为0.002mm,位移值较小。副臂梁与主臂梁前端连接部位的应力值最大为0.193MPa,机械手应力值不大,可以满足实际生产的要求。
1.2 机械手振动模态分析计算
典型的无阻尼模态分析求解的基本方程是经典的特征值问题:

其中:[k]为刚度矩阵;{i}为第i阶模态的振型向量(特征向量);i为第i阶模态的固有频率(是特征值);[M]为质量矩阵。
有许多数值方法可用于求解上面的方程,本文采用的是子空间(Subspace)法。子空间法使用子空间迭代技术,对计算机的内存要求低,计算精度很高,适用于大型特征值的求解问题。
现对样机进行振动模态分析,以确定机械手机械结构的固有频率和振型,机械手一般工作的频率在0-660HZ之间,属于低阶频率。因此在对结构进行模态分析时,重点考虑机械手系统的在此范围内的振型,对低阶频率进行分析,在分析中给出了前四阶振型图。
由模态分析的结果如图4所示可知,机械手的副臂梁、手臂从动梁前端节点处的位移较大。最大值为频率为330HZ时,副臂梁的最大振幅达到0.134mm,共振现象明显,在此频率下会影响到机械手工作过程中取移制品的精确度。
1.3 机械手瞬态动力学分析
瞬态动力学分析的求解的基本方程是:

其中:[M]为质量矩阵,[C]为阻尼矩阵,[K]为刚度矩阵,{u}为节点位移向量。ANSYS程序使用Newmark时间积分方法在离散的时间点上求解这些方程。
本文对机械手在工作过程进行有限元仿真分析计算,得到了机械手在各种工况时的动力学响应曲线。在副臂梁位移的最大处选取一点观察这一点在X方向(图5)和在Y方向(图6)位移随频率变化曲线。
可以看出在振动频率为550HZ时,副臂梁位移最大点在X方向的最大位移为0.026mm,在Y方向振动频率为440HZ时0.019mm。

图4 机械手模态分析结果图
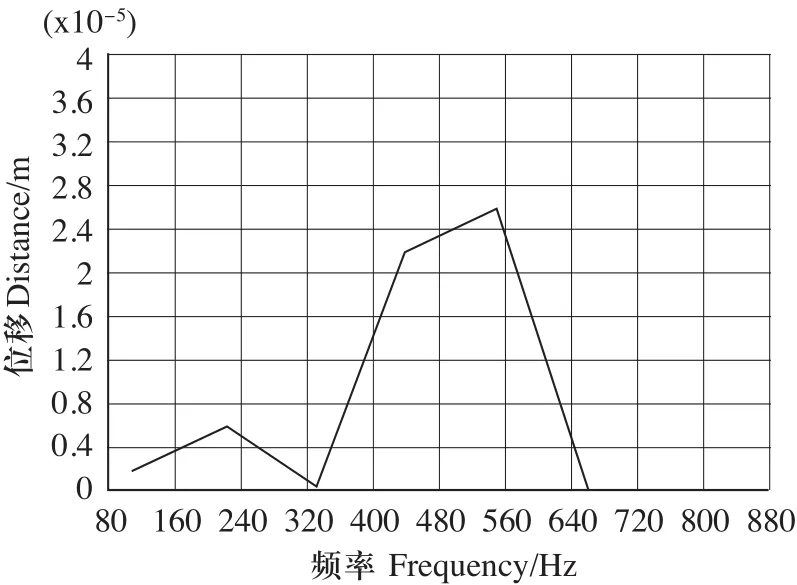
图5 X方向位移随频率变化曲线
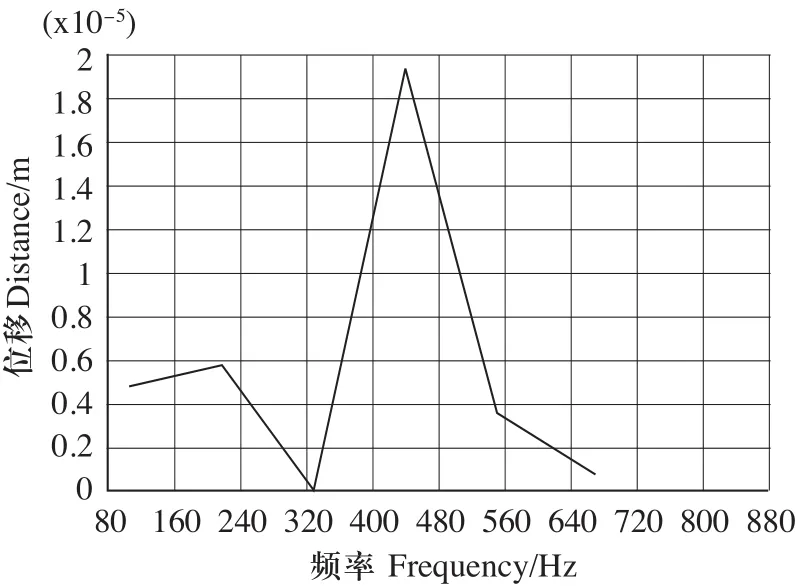
图6 Y方向位移随频率变化曲线
由此可以得出,机械手在承受静力载荷和低频振动的情况下位移值较大,需要改进以降低副臂梁在低频振动时的最大位移。本文中在对机械手优化过程中,对副臂梁进行重新设计,目的是提高机械手的整体机械性能。
2 优化后的机械手进行分析
将机械手引拔梁的结构改进,如图7所示。优化后的机械手,将气压缸的气动部件改装到侧面,气压缸气动部件通过副臂梁也有之前的双排的改为单侧,并将单侧的副臂梁装在气压缸的气动部件上可以按工作要求移动,满足机械手的移动行程。

图7 改进后的机械手结构示意图
通常,注塑机取模机械手的最大抓重是2千克(包括夹具重量)[6]。由于气压缸的气动部件改装到侧面并直接和主臂梁接触,所以大大的减轻了副臂梁上的压力。经计算电磁阀箱、防落气缸安装板、引拔气缸固定板、型材、气缸等一些气压缸气动部件占总重量的80%-83%之间, 针对改进后机械手实际工作状况,将机械手运动到各轴最大位移处在机械手简化模型的侧部施加竖直向下的20牛顿的力,模拟机械手的工作状况[7,8]。
如图8所示,机械手的副臂梁、手臂从动梁前端节点处的位移较大。最大值为频率为440HZ时,副臂梁的最大位移达到0.027mm。
在副臂梁位移的最大处选取一点观察这一点在X方向(图9)和在Y方向(图10)随频率变化的位移图。可以看出在振动频率为110HZ时,副臂梁位移最大点在X方向的最大位移为0.010mm,在Y方向振动频率为440HZ时0.003mm。
3 结论
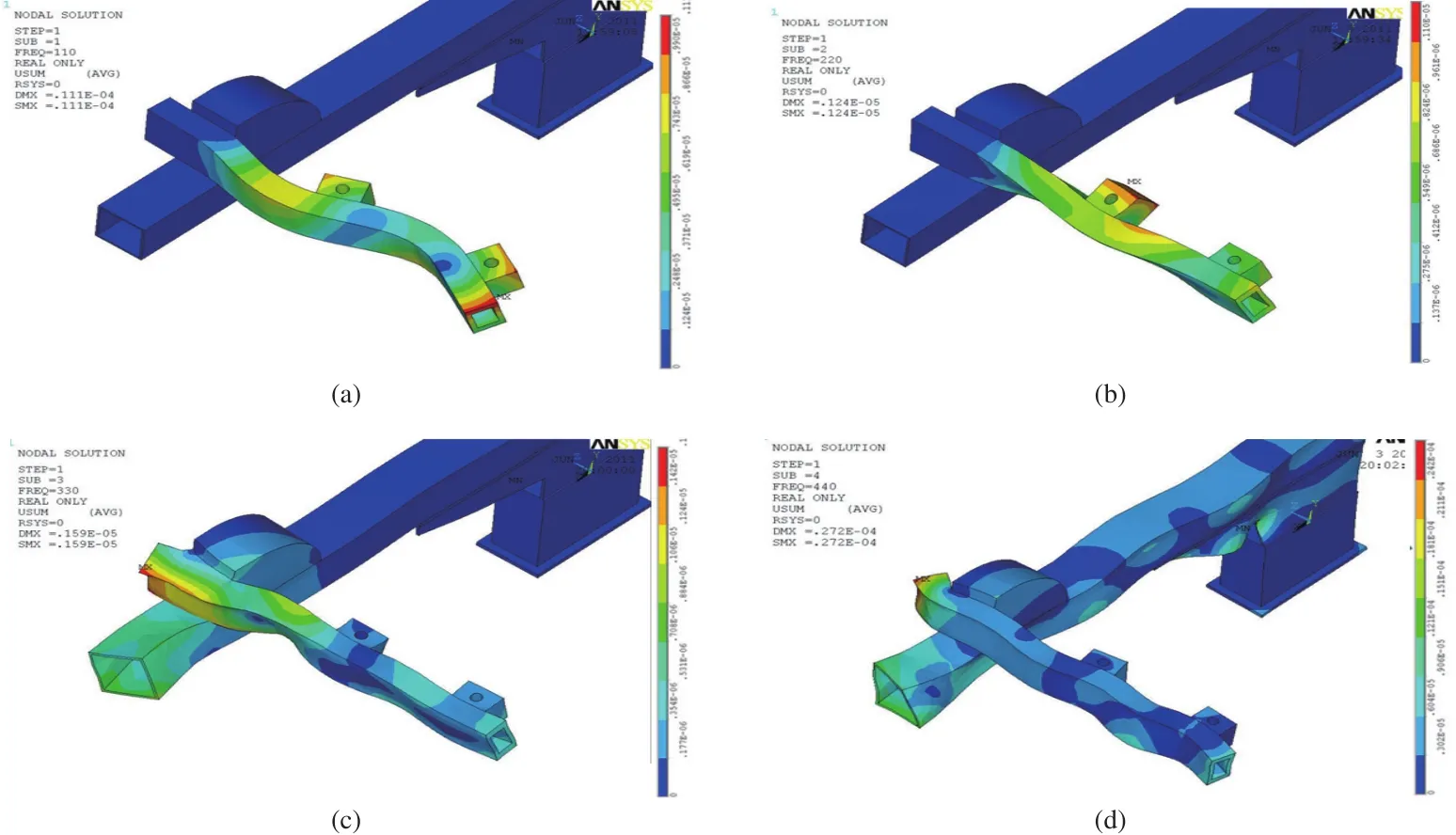
图8 改进后的机械手模态分析结果图

图9 X方向位移随频率变化图

图10 Y方向位移随频率变化图
针对某注塑机械手建立有限元模型,分析可以得出机械在抓取制品时振动大,定位不准确,精确度不高。经谐响应分析证明原机械手模型前副臂下端的X、Y两个方向个自由度方向振幅最大分别可以达到0.026mm、0.019mm。改进以后,两个自由度方向的振幅有较大下降,此时的振幅最大值分别为0.010mm和0.003mm,取得了很好的减振效果,尤其在竖直方向(Y方向)降低了一个数量级,这对提高机械手的工作精度和可靠性是十分有利的。同时改进后的结构可以增加周边的自由空间,达到了节约材料用量,控制成本的目标。
[1] 余达太, 等. 工业机器人应用工程[M]. 北京: 冶金工业出版社, 1999.
[2] 张铁, 谢存禧. 机器人学[M]. 广州: 华南理工大学出版社. 2001.
[3] 周俊荣, 王龙. 基于注塑机的三伺服机械手的研究与发展[D]. 江门: 五邑大学, 2009.
[4] 陆建辉, 李丰亭. 基于MTMD的某注塑机械手振动控制研究[J]. 现代制造工程.2007, (12): 113-115.
[5] 吴振彪. 工业机器人[M]. 武汉: 华中科技大学出版社,1997.
[6] 朱洪涛, 万志强. 注塑机机械手控制系统设计[D]. 南昌:南昌大学, 2007.
[7] UNECE, IFR. World Robotics 2005-Statistics, Market Analysis, Forecasts, Case Studies and Profitability of Robot Investment [M].Bethesda, Md. Lexis .Nexis, 2005.
[8] Klas Nilsson.Integrated Architecture for Industrial Robot Programming and control[J]. Robotics and Autonomous Systems, 1999, 29: 205-226.
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
昆明医科大学学报(2022年3期)2022-04-19
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
装备制造技术(2020年4期)2020-12-25
装备制造技术(2020年3期)2020-12-25
制造技术与机床(2019年6期)2019-06-25
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年4期)2017-06-22
中国塑料(2016年3期)2016-06-15
通信电源技术(2016年1期)2016-04-16
