
微小型动物机器人遥控刺激系统的研制*
2011-07-02 10:48张春帅
电子技术应用 2011年5期
张春帅 , 郭 策 ,蔡 雷 ,3
(1.南京航空航天大学 自动化学院,江苏 南京 210016;2.南京航空航天大学 仿生结构与材料防护研究所,江苏 南京210016;3.南京航空航天大学 机电学院,江苏 南京210016)
动物机器人是指利用动物体的运动机能、动力供应体制,从动物运动的感受传入或神经支配入手,实现对动物的运动和某些行为的人为控制[1]。与机电式机器人相比,在设计理念和控制方式上两者有天壤之别:动物机器人的设计不需考虑复杂的机械结构,控制上只需发送控制命令,具体动作由受控动物自己完成。不像机电式机器人的设计那样,为使它完成某个简单动作,设计者不得不进行大量的软、硬件设计。此外,现代非结构环境下的机器人的运动平稳性、灵活性、健壮性、环境适应性及能源利用效率等方面远远落后于动物机器人[2]。
近年来,动物机器人的研究受到越来越多的关注,科学家们已开展了对蟑螂机器人、老鼠机器人、甲虫机器人、壁虎机器人的研制工作[3-6],并且取得了许多令人振奋的成绩。
动物机器人的研究,关键是如何通过植入式电极,对动物脑内的特殊核团施加有效的电刺激来控制动物的行为。电刺激用于脑研究已经有很长的历史,常用的方法是通过连接线将刺激装置与动物头部的刺激电极直接相连。虽然该方法常用于动物行为实验,但连接线严重限制了动物的活动自由,而且连接线容易缠绕和断裂,分散动物注意力或使其产生痛苦情绪,达不到完全自由控制的目的。因此,研究可靠且体积小、重量轻、能耗低、效率高、传输远的动物机器人遥控系统就变得非常重要[7]。本文以鸽子为实验动物,研制了一款微小型动物机器人无线遥控刺激系统。
1 无线遥控系统的组成
无线遥控系统由无线遥控发射站和背负在动物身上的多通道无线遥控刺激器两部分组成,如图1所示。无线遥控系统的发射站由Labview 8.5的控制界面PC机和无线信号发射台组成,通过USB进行通信。发射模块上的无线单片机CC1110首先接收来自PC机上的刺激参数信号,数据接收完成后,根据已制定的数据格式来判断数据是否正确,如果正确,则无线单片机将数据发射出去;如果数据错误,则无线单片机将数据丢弃,等待接收下一次数据。位于发射台上的两个不同的LED灯通过闪烁来提示操作者数据是否发送正确。无线遥控刺激器接收来自发射端的数据,首先判断数据是否正确,然后根据接收的命令在特定的通道产生相应的刺激信号,对动物进行控制。
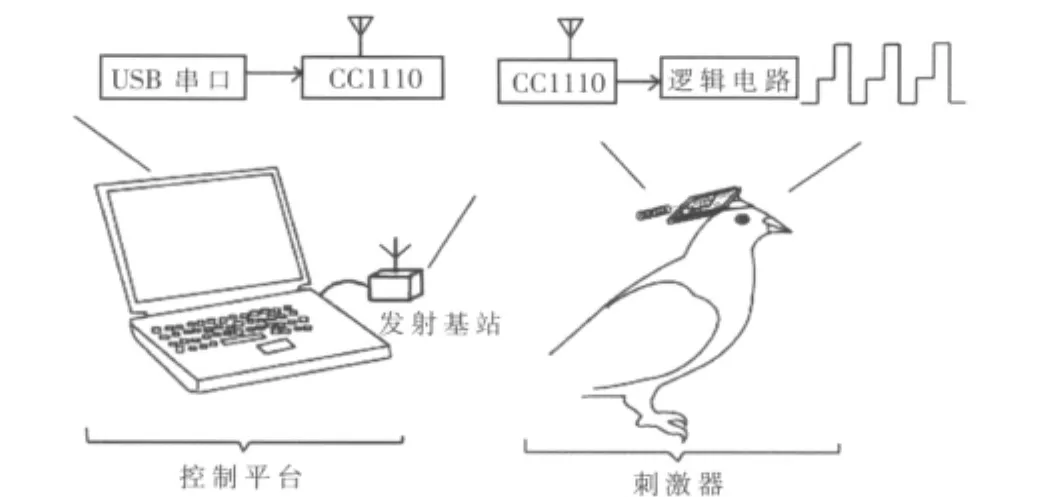
图1 动物机器人遥控示意图
1.1 基于LabView的控制面板的研制
位于PC机上的控制面板程序采用LabView 8.5软件编写,控制界面共分为:刺激通道选择、刺激参数设置、串口通信设置、数据接收区和刺激命令发射。
动物机器人刺激系统共设计有8个独立通道可选择。刺激参数设置包括设置每个通道的刺激强度、刺激频率、刺激脉冲宽度和刺激时间。每个通道的刺激强度从0~5 V可选,调节精度为0.1 V。刺激频率和脉冲宽度可以根据实验要求在一定范围内调节,刺激频率的调节精度为1 Hz,脉冲宽度的调节精度为 0.1 ms,刺激时间在0~255 s内可调,调节精度为1 s。串口通信设置用来设置串口资源和串口波特率。数据接收区用来接收发射端反馈的信息。刺激命令用来发射刺激信号。
在LabView中利用VISA节点进行串行通信编程。LabView将这些VISA节点单独组成一个子模块,共包含8个节点,分别实现初始化串口、串口写/读、中断以及关闭串口等功能。在本文中用到如下节点:
(1)调用“VISA配置串口”节点完成参数的设置,包括串口资源分配、波特率等。在本系统中波尔率设为57 600 b/s,串口资源由计算机自动辨认。
(2)使用“VISA写入”节点发送数据,使用“VISA读取”节点接收数据。
(3)串口使用结束后,使用“VISA关闭”节点结束与指定串口之间的会话,关闭占用的串口资源。
在进行实验时,串口通信的任务是将上述参数打包并发送到发射基站。由于LabView串口只能读写字符串,因此,必须将双精度的数据格式参数进行必要的变换才能进行传输。本文采用了“数组至字符串”的转变命令将双精度数据数组转换为相应的字符串。为了防止计算机向无线信号发射台传输的数据出现错误,本系统规定了串口通信的数据包格式为:数据包的长度为24,数据的前两位和后两位都是字符“Y”。数据的正确与否由发射基站的MCU进行判断,如果数据正确可将数据发射出去;如果数据错误则被自动舍弃,等待接收新的数据。
1.2 无线遥控发射台和刺激器的研制
遥控系统的控制器采用了美国TI公司的CC1110芯片。CC1110是一块包含了CC1100 RF收发机,并内嵌有加强型51内核单片机的芯片。芯片内嵌32 KB的Flash存储器、4 KB的RAM存储器、8通道8~14 bit A/D转换器、1个 16 bit定时器和 3个 8 bit定时器、2个 UART/SPI、RTC和21个通用I/O。基于CC1100芯片的高性能无线收发器工作在433 MHz,频率稳定性好、灵敏度高、无线数据传输最大速度可达500 Kb/s,采用低供电电压(2.3 V~3.6 V),在数据采集发送期间的电流消耗为18 mA,休眠期间,电流消耗非常低只有 0.5 μA;工作温度范围为-40℃~85℃,适应恶劣环境。CC1110采用 6 mm×6 mm的QLP36封装,对外部元件的需求量很低,无需外置滤波器或Tx/Rx开关,其外围硬件电路如图2所示。因此可最大程度减少电路设计的复杂性。

图2 CC1110外围硬件电路
无线遥控发射台的作用是接收来自计算机串口传来设置的参数并发送到接收端刺激器,由AMS1117-3.3构成的降压稳压电路、CP2102构成的串口通信电路和无线发射模块组成。无线信号发射台各部分电路的连接关系如图3所示。在本系统中,通过USB供电,但是由于无线芯片的电压在2.3 V~3.6 V之间,所以选用3.3 V降压稳压芯片为无线发射模块供电。

图3 无线信号发射台的电路连接
刺激器是整个遥控系统的核心,也是系统研制的难点。它既要求工作稳定可靠,还必须满足能耗低、尺寸小、重量轻等要求。本设计中,为了减小刺激器尺寸和重量,电路中的电阻、电容和电感都采用0402小型贴片封装(其他芯片亦都采用贴片封装)。整个刺激器包括电池的重量约为7.3g(系统选用锂电池,其重量 3.8 g,容量 140 mAh),体积为20 mm×30 mm×6 mm,适合于小型动物携带,并有利于减少由于动物负重对实验效果的不利影响。
刺激器由无线单片机CC1110、2片REG710和TC7660组成的电源管理电路、D/A芯片AD5310与运放AD820组成的双向电压发生电路、CD4051模拟开关以及1块电池组成,如图4所示。
由于系统不同芯片对供电电压的要求不同 (无线单片机的供电电压在2.0 V~3.6 V,而其他芯片的供电电压大都需要5 V以上)所以电路中稳压芯片电压 (3.3 V和5 V)分别为不同的芯片供电。刺激器上的两个LED组成指示电路。负压发生电路由TC7660及两个有极电容组成,产生-5 V电压,分别为双向电压发生电路的AD820和模拟开关CD4051供电。双向电压发生电路如图5所示,AD5310接收来自单片机的数据,经过转换后,输出单向电压。AD5310输出到AD820的正向输入,根据运放的特点,AD820的输出电压Vo等于两倍的正向输入电压Vo1减去 5 V(2Vo1-5),当Vo1在 0 V~5 V变化时,输出电压Vo在-5 V~5 V间变化,为双向电压脉冲。模拟开关CD4051根据选择通道输出正负脉冲信号。
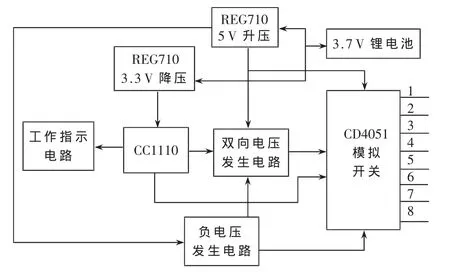
图4 微刺激器的电路框图

图5 双向电压发生电路
2 刺激信号的产生
本文利用 CC1110单片机的 p02、p03、p04控制模拟开关的8个输出通道,根据实验所选的通道分别输出刺激电压脉冲。刺激器的每个通道可以独立输出0~5 V频率、幅值和时长均可调的双向电压脉冲,如图6所示,电压脉冲信号完全对称。研究证明刺激脉冲的波形与极性对神经冲动的发放有较直接的关系,电荷的积累将使机体组织产生永久性损伤。为此,本系统采用双极刺激脉冲,使生物组织的总电荷为零,减小了刺激脉冲对神经的损坏[8]。

图6 不同刺激参数下的波形
3 无线遥控刺激系统用于鸽子运动行为的诱导实验
在鸽子运动行为的遥控诱导实验中,把微刺激器和锂电池装在鸽子头上,如图7所示。通过无线遥控发射台向微刺激器发送控制命令,诱导鸽子产生相应的行为动作。实验过程中,根据实验情况设置合适的频率、波宽参数,刺激的电压强度根据鸽子脑部刺激位点的不同进行独立设置。

图7 刺激系统的实验应用
利用本文研制的微小无线遥控刺激系统发送刺激信号,可以初步实现人工诱导鸽子做出左、右转以及飞行的动作,实验动物在一周后再次利用该系统进行电刺激,动作依然能够重复出来,这证明了刺激信号的有效性,也说明该系统工作具有可靠性和稳定性,适用于遥控动物机器人的运动行为。
本文设计了用于动物机器人的无线遥控系统,其中背负动物体上的微刺激器体积小、重量轻、能耗低,该系统能够实现多通道刺激,并且每个通道的参数根据不同的动物要求可进行独立调节。通过鸽子运动行为遥控诱导实验证明,该系统工作稳定可靠。
目前,动物机器人遥控系统在实验室能够有效地实现对动物运动行为的诱导,但考虑应用于工程实践,未来还需要进一步增加系统的图像采集功能,如微型CCD摄像头等,以便将现场环境的实际情况实时传输给操作者,从而更加有效地控制动物的运动行为为人类服务。
[1]郭策,戴振东.动物机器人的研究现状及其未来发展[J].机器人,2005,27(2):187-192.
[2]DICKINSON M H,FARLEY C T,FULL R J,et al.How animalsmove:an integrative view[J].Science,2000,288(7):100-106.
[3]HOLZER R,SHIMOYAMA I.Locomotion control of a biorobotic system via lectric stimulati[J].IEEE,1997(8):1514-1518.
[4]杨俊卿,苏学成,槐瑞托,等.基于新型多通道脑神经刺激遥控系统的生物机器人研究[J].自然科学展,2007,17(3):379-384.
[5]SATO H,PEERI Y,BAGHOOMIAN E,et al.Radio controlled cyborg beetles:A radio frequency system for insect neural flight control[C].2009 IEEE 22nd International Conference on MicroElectroMechanical Systems,MEMS 2009,2009:2162219.
[6]谢合瑞,郭策,戴振东.恒流多通道动物机器人遥控刺激系统的研制[J].现代电子技术,2009,25(4):68-71.
[7]戴振东.生物机器人的发展及其关键技术[J].科学前沿,2008,7(1):58-61.
[8]TEHOVNIK E J.Electrical stimulation of neural tissue to evoke behavioral responses[J].J Neurosci Methods,1996,65(1):1-7.
猜你喜欢
小学生优秀作文(低年级)(2021年11期)2021-12-06
装备制造技术(2020年11期)2021-01-26
医疗装备(2020年5期)2020-04-14
电子制作(2019年7期)2019-04-25
科技创新导报(2019年29期)2019-03-16
语文世界(小学版)(2019年2期)2019-02-24
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
地矿测绘(2015年3期)2015-12-22
实用手外科杂志(2015年1期)2015-08-27
