
核电站热交换器传热管外部检测机器人的研制*
2011-06-25 06:33李旻章亚男龚振邦
华南理工大学学报(自然科学版) 2011年8期
李旻 章亚男 龚振邦
(1.华南理工大学机械与汽车工程学院,广东广州510640;2.上海大学机电工程与自动化学院,上海200072)
热交换器是压水堆核电站的重要设备,传热管是热交换器的关键部件,热交换器中有几千根细小的传热管以很小的间隙分布在管板上.工作时传热管内部高温高压的一次侧水通过传热管与外部的二次侧水进行热交换(见图1(a)),同时传热管还起到隔离核辐射的重要作用.由于工作在高温高压和交变载荷等恶劣环境下,泥渣堆积、腐蚀和裂纹等缺陷容易出现在传热管束与管板连接区域[1].核电站的安全运营要求定期对热交换器进行维护,目前传热管外部是由维护人员利用工业内窥镜进行检查,由于工作空间狭小、有辐射,工作难度很大,必须研制机器人来提高检查质量和效率[2].
美国福斯特·米勒公司、日本三菱电机公司、日本奥林帕斯公司和国内的上海交通大学曾开展过这类机器人的研究工作.美国福斯特·米勒公司研制的联合爱迪生检查冲洗机器人系统(CECIL)能对热交换器传热管间进行视频检查,但结构笨重,价格昂贵,安装辅助时间长[3];日本三菱电机公司基于微机电系统(MEMS)技术研制了传热管外表面检查的链式微机器人系统,但由于无法解决微细电缆对微机器人机动性的不利影响等问题而不能实用化[4],上海交通大学也研制了用于核工业管道检测的电磁型微电机驱动的毫米级轮式微型机器人[5],但也同样存在这类问题;日本奥林帕斯公司研制的导管型微机器人虽能在有限的几个部位实现弯曲,可在狭窄缝隙中检查,但无法胜任在热交换器密集分布的传热管束间隙中的自动化检查工作[6].
1 方案的分析
图1(b)所示为热交换器相关部位的模型[7],传热管均匀分布安装在管板上,管板直径为1000mm,传热管外径为22 mm,相邻两根传热管横向和纵向的管间距都为15 mm(即中心距都为37 mm).管束中沿管板径向有一条宽度为120mm的管廊,管廊两端的热交换器圆柱筒壁(图1(b)未示出)上有两个正对的供检修用的手孔,直径都为200mm.
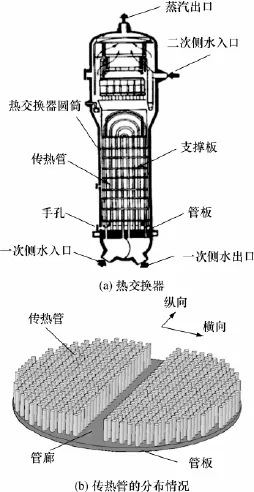
图1 热交换器与传热管Fig.1 Heat exchanger and heat transfer tubes
要求设计机器人对传热管束与管板连接区域外部进行视频检查(传热管外壁其他部位的状况可另通过搭载涡流传感器的管内机器人进行检查[8]).机器人只能通过手孔进入热交换器,由于工作空间狭小,待检查的区域范围大,采用常规的关节式、轮式、腿足式机器人无法满足要求,必须采用可伸缩的结构将微型摄像头送入到每一排管束间隙中.微型摄像头配接定焦镜头,并且视场角有限,因此摄像头的位置和姿态应该能够调整,这样才可确保清楚观察到所有待查区域.此外,为提高机器人的通用性,可将机器人的结构划分为多个功能模块,通过不同型号功能模块的组合来满足不同型号尺寸的热交换器检查要求.基于以上考虑,综合对比多套方案后,确定机器人本体由纵向移动模块、旋转模块、定位模块、伸缩模块、小车模块、底座和驱动器等部分组成.
2 机器人本体结构
2.1 总体结构
如图2所示,机器人细长的底座上固定有导轨,底座两侧装有定位模块,底座由其底部的4个万向滚珠支撑,底座左侧装有水平步进电机驱动的同步齿形带机构.导轨上装有纵向移动模块,由同步齿形带带动.纵向移动模块上有旋转模块,由垂直步进电机通过同步齿形带驱动.旋转模块上装有伸缩模块.伸缩模块由直流电机驱动,伸缩模块柔性钢带的末端有1个小车,小车搭载摄像头,并装有形状记忆合金(SMA)弹簧驱动的微型3-CSR并联机构.
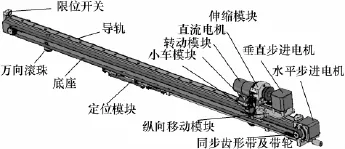
图2 机器人本体结构Fig.2 Structure of robot body
2.2 定位模块
工作之前,机器人在管廊中首先要相对传热管束获得一个正确的位置,并将底座固定住.虽然机器人是在结构环境下作业,但工作空间狭窄封闭,难以配置传感器或辅助装置定位,故考虑通过定位模块利用传热管高精度的外圆柱表面来帮助实现定位.定位模块关于底座纵向中心平面是左右对称的,由螺旋传动机构、曲柄滑块(杆状)机构和平行四边形机构依次连接组成,四个定位块分别固定在四个曲柄上,其内圆弧面直径等于传热管外径(见图3(a)).工作时,操作者可放置机器人在预定位置附近,转动手柄(螺杆),使螺母(杆状滑块)移动,带动4个曲柄同时转动,从而使4个定位块伸出与用于定位的4根传热管的外表面接触,定位块与传热管之间的互相作用使机器人本体移动(底座下部的4个万向滚珠使得机器人位置调整时阻力很小),直至定位块的内圆弧面与相应的传热管外表面贴合,这样机器人的工作位置就确定了(见图3(b)).螺旋传动机构的螺旋副可以自锁,故定位模块在定位的同时也实现了机器人位置的固定.
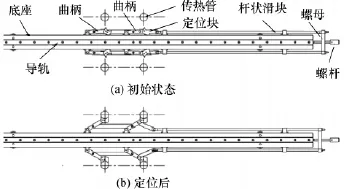
图3 定位模块Fig.3 Locating module
2.3 伸缩模块
从图1(b)可以看出,传热管束分布在一个圆形区域内,所以摄像头在每排间隙中检查时横向移动距离不同,这可通过伸缩模块来实现.如图4所示,伸缩模块由直流微电机、微齿轮减速器、码盘、光电开关、柔性钢带、卷筒、卷筒轴、压紧器、线筒等组成.小车连接在柔性钢带末端,微电机通过减速器带动卷筒轴转动.柔性钢带卷缠在卷筒轴上,由压紧器压紧.微电机的正反转使钢带产生伸缩动作,将小车送入管束间隙或从管束间隙中收回.柔性钢带伸出的长度取决于该排管束间隙长度,可由码盘实时测量进行控制.线筒安装在卷筒轴上,小车的电源线及信号线缠绕在线筒上,和柔性钢带同步伸缩.
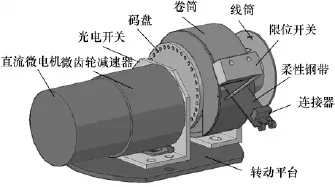
图4 伸缩模块Fig.4 Extending and retracting module
2.4 小车模块
如图5所示,小车模块的小车上搭载微型CMOS摄像头,摄像头固定在微型3-CSR并联机构的活动平台上.小车装在柔性钢带末端,在柔性钢带平缓的推拉作用下运动,由于动力来自外部,所以小车不会在管板泥渣积垢上倾覆.
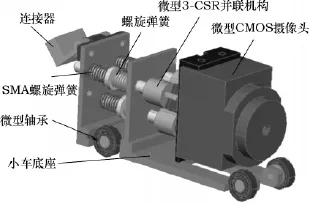
图5 小车模块Fig.5 Micro vehicle module
如图6(a)所示,空间3-CSR并联机构由固定平台 A1A2A3、活动平台 B1B2B3、导杆 si(i=1,2,3)、连杆li(i=1,2,3)、3个圆柱副C、3 个球面副S和3 个转动副R组成[9].3个圆柱副分别连接3根导杆与固定平台,圆柱副的轴线垂直于固定平台;3个球面副分别连接3根导杆与3根等长的连杆;3根连杆与活动平台之间则用转动副相连.ΔA1A2A3和ΔB1B2B3均为等边三角形,转动副的轴线位于ΔB1B2B3顶点处并与其外接圆相切.可知3-CSR并联机构自由度为3.如果改变导杆s1、s2和s3的长度(即以圆柱副中的移动副为驱动副),就能调整活动平台(微型摄像头)的位姿.
在该微型3-CSR并联机构中,3个移动副由3个偏动式SMA双程驱动器驱动[10],驱动元件为用SMA丝绕成的螺旋弹簧,普通压缩螺旋弹簧和SMA螺旋弹簧处于对顶状态(见图6(b)).偏动式SMA双程驱动器利用SMA在高温母相时屈服应力高,低温马氏体相时屈服应力低这个性质来工作[11].在低温状态下,SMA弹簧刚度较低,其压缩变形比普通弹簧大.加热升温发生相变后,由于形状记忆效应,SMA弹簧伸长,产生较大的形状回复力,将普通弹簧压紧,从而使导杆发生位移.当回到低温状态时,普通弹簧的弹性又使导杆复位.如此反复升、降温,就能让导杆往复运动,从而实现双程动作功能.只要控制好3个偏动式SMA双程驱动器导杆的位移,就能让活动平台获得所需位姿.
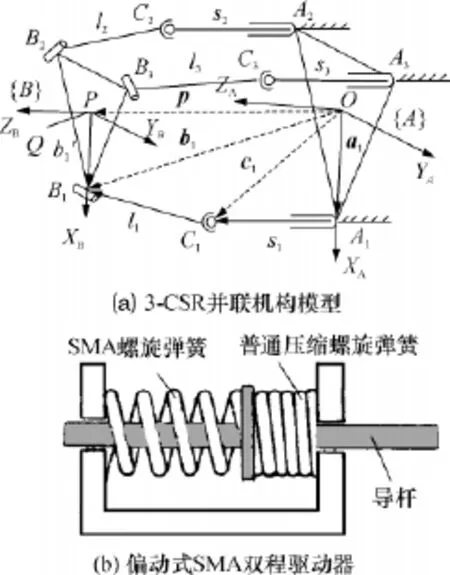
图6 微型3-CSR并联机构Fig.6 Micro 3-CSR parallel mechanism
3 工作步骤及路径规划
工作步骤与路径规划如下:
(1)定位固定 通过手孔将机器人送入热交换器,放置在管板上,并将机器人移动至预期位置附近,再用定位模块定位、固定机器人本体;
(2)复位系统上电,纵向移动模块移动至导轨起点,实现机器人复位,等待工作指令;
(3)纵向移动模块工作收到指令后,纵向移动模块向导轨终点运动(间歇移动),到达工作位置(小车正对每排管束间隙时)后停止;
(4)伸缩模块工作伸缩模块的柔性钢带将小车送入该排管束间隙中,小车搭载微型摄像头在管板上移动并摄像;
(5)微型3-CSR并联机构工作若发现某区域可疑,可使小车暂停,利用微型3-CSR并联机构调整微型摄像头位姿对该区域进行更全面的观察;
(6)伸缩模块工作 小车移动到该排间隙末端时,伸缩模块将小车收回,判断纵向移动模块是否到达导轨终点,若没有,则跳至步骤(3)继续执行;
(7)旋转模块工作 旋转模块转过180°,以便机器人对另一侧的管束间隙进行检查;
(8)纵向移动模块工作纵向移动模块向导轨起点运动(间歇移动),到达工作位置;
(9)伸缩模块工作伸缩模块的柔性钢带将小车送入该排管束间隙中;
(10)微型3-CSR并联机构工作若发现某区域可疑,可利用微型3-CSR并联机构调整微型摄像头位姿对该区域进行更全面的观察;
(11)伸缩模块工作小车移动到该排间隙末端时,伸缩模块将小车收回,判断纵向移动模块是否到达导轨起点,若没有,则跳至步骤(8)继续执行;
(12)工作结束.
4 控制系统
机器人控制系统可控制机器人按照规划好的路径工作,由上位机、下位机两级计算机系统组成,图7所示为控制系统框图.上位机采用工控机,用VB编制的图形用户控制界面能设置工作参数、发送工作指令、监视机器人状态、显示观察到的视频图像.上、下两级计算机通过RS-232C总线串行通信.下位机为Atmel的89S51单片机,其外围驱动控制器件主要包括逻辑电平转换芯片MAX232、步进电机控制器 SH-2H042Mb、开关电源脉宽调制芯片TL598、SMA弹簧驱动器TIP132、光电耦合器4N25和逻辑运算器、比较器芯片及继电器等.
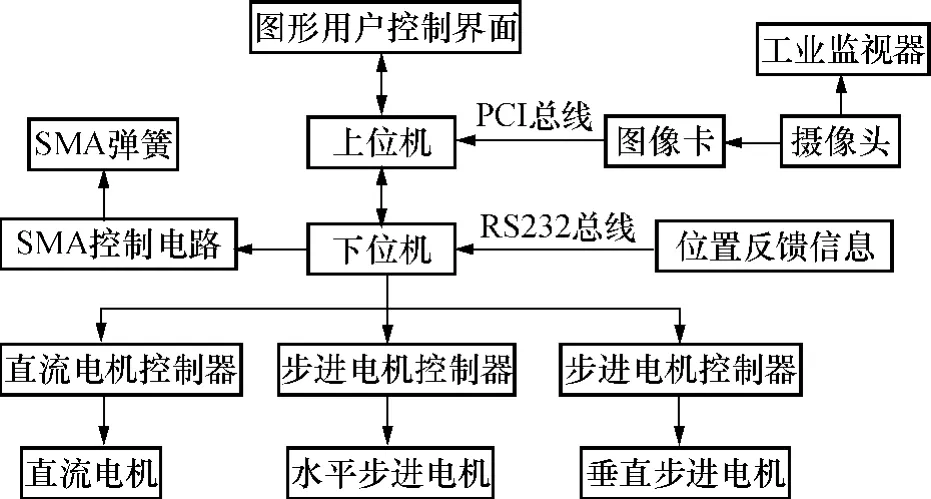
图7 控制系统框图Fig.7 Block diagram of the control system
由于纵向移动模块频繁启停,并且每次行程只有15mm,为提高效率并防止步进电机失步,将纵向移动模块的每个行程分为加速段和减速段,采用了模糊控制方法设计了步进电机的加减速曲线[12].图8所示为速度模糊控制系统框图,系统的输入为脉冲数N(表示纵向移动模块的位置),输出为脉冲频率F(表示纵向移动模块的速度),速度模糊控制通过离线计算和在线查表的方法来实现,KN和KF分别表示N和F的尺度转换系数,n0和f0分别表示N和F经尺度转换后得到的值,n和f分别表示N和F经模糊转换得到的离散点.
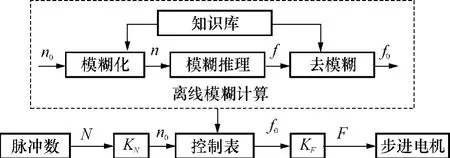
图8 速度模糊控制系统框图Fig.8 Block diagram of fuzzy velocity control system
根据传热管束和管板相连区域的缺陷检测要求,提出了一种根据视频检查图像对各区域进行评价的灰色评价方法[13].该方法包括获取评价量样本矩阵,设定评价灰类,计算灰色评价系数、灰色评价权向量及矩阵,根据不同评价要素进行评价和综合所有评价要素进行评价等5个步骤,将定性与定量分析相结合,以定量分析评价为主,把评价人员提供的分散信息归纳成确切的评价值,能吸收各类基层信息做出高层次系统综合,比常用的求和、求平均值法更符合客观实际,并根据该评价原理用VB编制了灰色评价程序.
5 样机试验
机器人样机大部分零件用材料LY12制成,机器人本体长1080 mm,小车完全收回的情况下机器人最大横截面宽85mm,高120mm,总质量仅为3.5kg.图9所示为样机及试验平台.小车的长、宽、高分别为44、13、24mm.
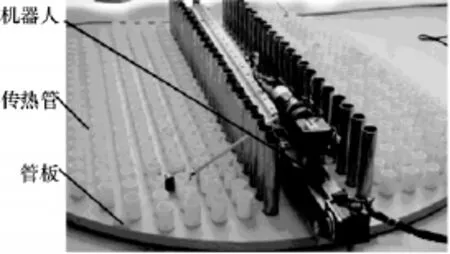
图9 机器人样机与试验平台Fig.9 Robot prototype and experimental platform
在默认的系统参数下,样机在23 min内完成了试验平台上相关区域的检查.纵向移动模块平均速度为13 mm/s,小车横向移动速度为12 mm/s,这些工作参数可根据需要通过操作界面设置.摄像头前端的LED照明单元可照亮前方待查区域,传热管束与管板相交部位的情况可在监视器上清晰显示.
分别给3根SMA螺旋弹簧通以不同占空比的脉宽调制电流,微型3-CSR并联机构产生运动,摄像头的位姿则会发生相应改变,导杆的行程为5mm.图10(a)所示为摄像头的偏转动作,偏转角度范围为±16.5°;图10(b)所示为俯仰动作,俯仰角度范围为 -14°~ +25°.
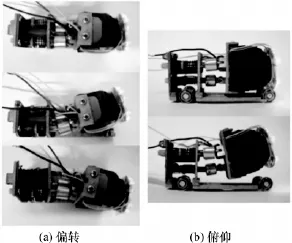
图10 微小摄像头姿态调整Fig.10 Pose change of the micro camera
6 结语
研制了一套能对热交换器传热管外部进行检查的机器人系统,该系统具有以下特点:
(1)定位模块原理简单,能高效可靠地实现机器人的定位与固定,与美国福斯特·米勒公司的CECIL机器人相比结构较轻,成本较低,安装辅助时间很短;
(2)伸缩模块能将搭载微型摄像头的小车送入每排管束间隙中并收回,可检查到人工检查无法观察到的区域,避免了日本三菱电机公司和上海交通大学的轮式微型机器人容易倾覆,以及微细电缆带来的机动性不良和缠绕等问题;
(3)小车模块上安装有SMA弹簧驱动的微型3-CSR并联机构,可改变摄像头的位姿,扩大观察范围,克服了日本奥林帕斯公司的导管型微机器人无法观察到所有管束间隙的缺点;
(4)纵向移动模块步进电机的升降速曲线采用了模糊控制理论进行设计,可防止失步;
(5)提出的灰色评价方法能吸收各类基层信息做出高层次系统综合,更客观合理地评价检查区域质量.
样机试验结果表明该机器人的性能达到了设计要求,实现了热交换器传热管外部的自动化检查,有助于缩短核电站的停堆检修时间.
[1]Kang S J,Moon J C,Choi D H,et al.A distributed and intelligent system approach for the automatic inspection of steam-generator tubes in nuclear plants[J].IEEE Transactions on Nuclear Science,1998,45:1713-1722.
[2]李旻.细小工业管道群管束间狭窄空间检测机器人系统的研究[D].上海:上海大学机械学院,2003.
[3]DirectIndustry.Nuclear steam-generator tubesheet video inspection system [EB/OL].[2011-02-26].http:∥www.directindustry.com/prod/qinetiq/nuclear-steam-generator-tubesheet-video-inspection-systems-35062-216452.html.
[4]Tokada M.Experimental chain-type micromachine for inspection on outer surface of tubes[C]∥Proceedings of the 6th International Micro Machine Symposium.Piscataway:IEEE,2000:149-153.
[5]李振波,陈佳品,章亚男,等.毫米级多微型机器人协调策略的研究[J].应用科学学报,2004,22(2):195-199.Li Zhen-bo,Chen Jia-pin,Zhang Ya-nan,et al.Research on the cooperation strategy for the multiple microrobots inspection system between pipes[J].Journal of Applied Sciences,2004,22(2):195-199.
[6]Ohta R.Results of R & D on catheter-type micro machine[C]∥Proceedings of the 2001 International Symposium on Micromechatronics and Human Science.Piscataway:IEEE,2001:5-12.
[7]朱齐荣.核电厂机械设备及其设计[M].北京:原子能出版社,1990.
[8]Norman R C,Glease I.Novel instrumentation in the nuclear industry[J].Measurement and Control,1991,24(8):166-172.
[9]李旻,翟宇毅,章亚男,等.狭窄空间内微小摄像头位姿调整并联机构的研究[J].机械科学与技术,2004,23(3):312-315.Li Min,Zhai Yu-yi,Zhang Ya-nan,et al.Micro parallel mechanism for adjusting the attitude of a camera in narrow space[J].Mechanical Science and Technology,2004,23(3):312-315.
[10]Yu H,Ma P,He D.Motion mechanism and gait planning of a wheeled micro robot[J].Journal of Southeast University:English Edition,2006,22(2):191-195.
[11]杨杰,吴月华.形状记忆合金及其应用[M].合肥:中国科学技术大学出版社,1993.
[12]李亚,杨亮,任鹏,等.步进电机短位移高响应加减速控制方法研究[J].组合机床与自动化加工技术,2010(8):30-32.Li Ya,Yang Liang,Ren Peng,et al.The study on the control method of short displacement and high-response for stepper[J].Modular Machine Tool& Automatic Manufacturing Technique,2010(8):30-32.
[13]李旻,章亚男,龚振邦.管间区域视频检查的灰色评价方法[J].现代制造工程,2009(9):18-21.Li Min,Zhang Ya-nan,Gong Zhen-bang.A grey evaluation method for video inspection in pipe bundles[J].Modern Manufacturing Engineering,2009(9):18-21.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
山东冶金(2022年1期)2022-04-19
制造技术与机床(2018年8期)2018-10-09
中国船检(2017年3期)2017-05-18
商业文化(2016年36期)2016-03-01
焊接(2016年6期)2016-02-27
西部广播电视(2015年8期)2016-01-16
上海金属(2015年3期)2015-11-29
塑料包装(2014年2期)2014-11-29
中国氯碱(2014年11期)2014-02-28
